目的
对AGV循迹过程进行分析,探讨轨道对AGV性能的要求,为设计参考轨道提供参考。
1 正弦曲线
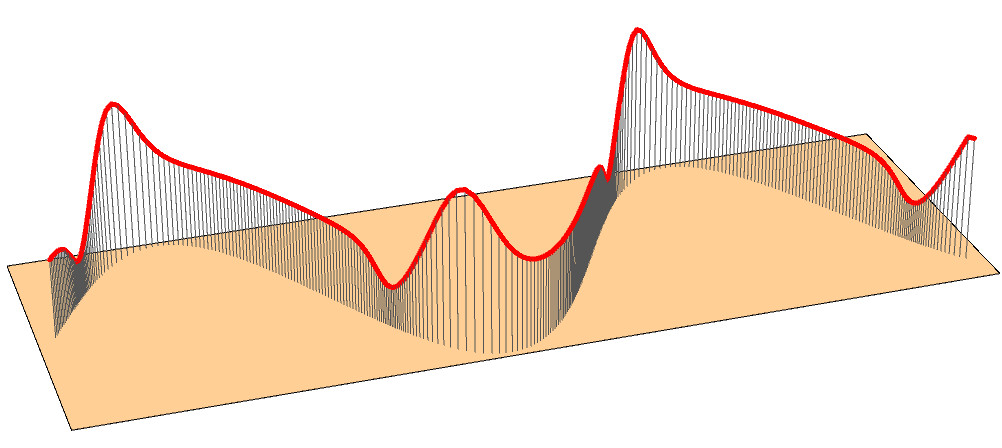
AGV通过安装在收尾两端的传感器检测铺设的导引轨道,随后调整驱动轮的角度或者速度实现对轨道的跟随,本文研究AGV轨道对其运动性能的要求。首先来看正弦曲线,如下图所示。其中两个箭头位于AGV中轴线上,表示传感器的按照位置,箭头指向轨道的切线方向。
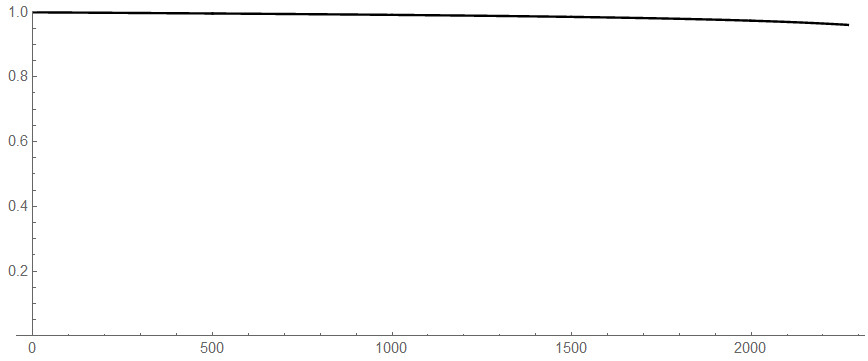
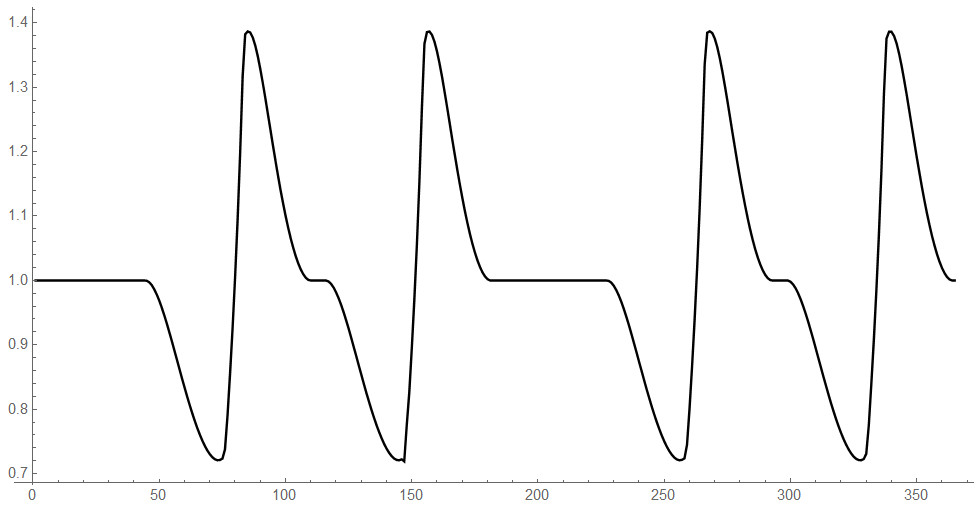
我们假设前面的点总是匀速运动(速度 ),后面的点为了始终保持在轨道上,则必须满足一定的要求。我们将后点的速度画出,如下图所示。可见后点的速度并不是恒定不变的。在经过曲线的波峰和波谷之前,后点的速度甚至能达到前点的两倍。而且,在经过波峰时,后点速度总是先减小再增大。

2 8字形曲线
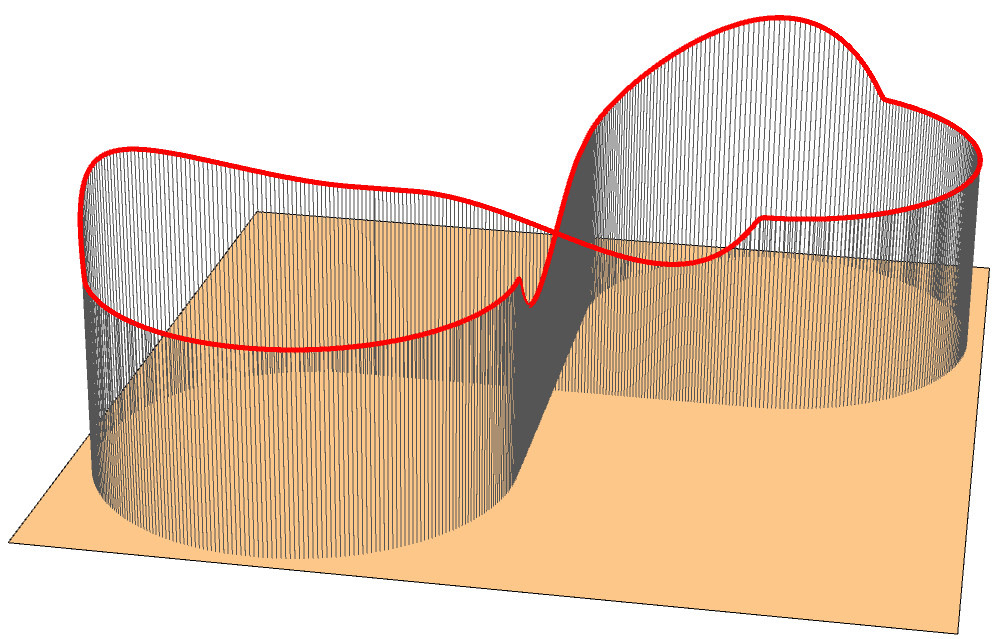
下面是跟踪8字形轨道。前面的正弦曲线是光滑曲线,而8字形曲线连续但不光滑,可以看到后点的速度也是不光滑的。

3 圆弧连接的直线轨道
下面是跟踪由圆弧连接的直线轨道。

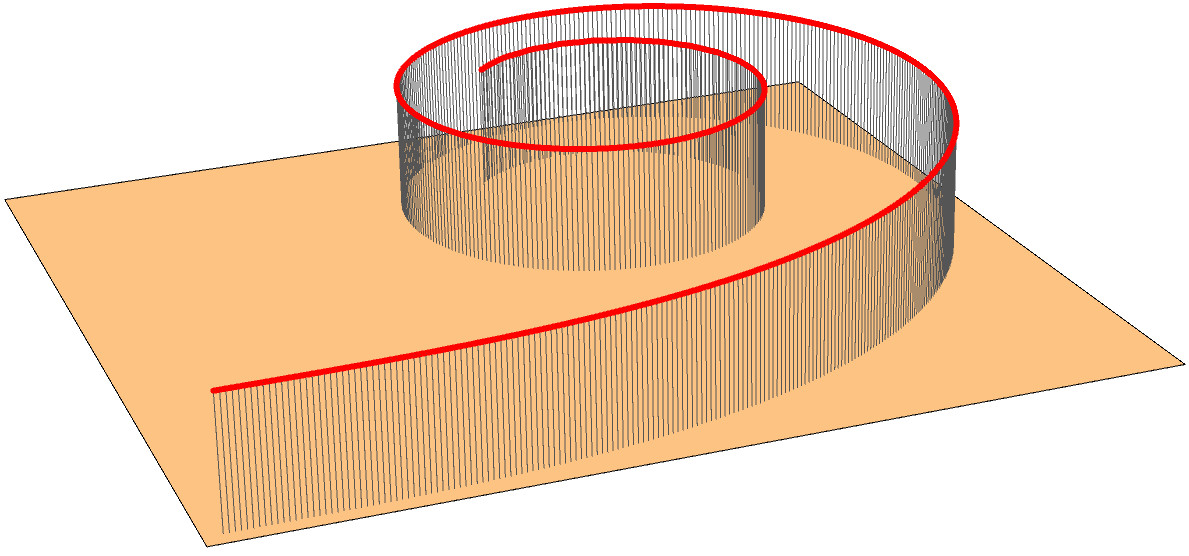
4 Clothoid螺旋曲线
下面是跟踪Clothoid螺旋曲线轨道。