按照https://github.com/uzh-rpg/rpg_esim/wiki/Installation 安装好
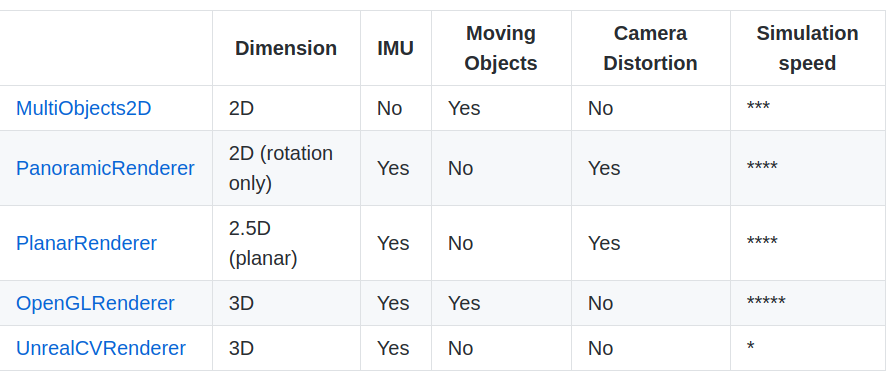
然后进行模拟实验,首先是Planar-Renderer这个:https://github.com/uzh-rpg/rpg_esim/wiki/Planar-Renderer
roscd esim_ros gedit cfg/example.conf
先进来修改一下绝对路径: 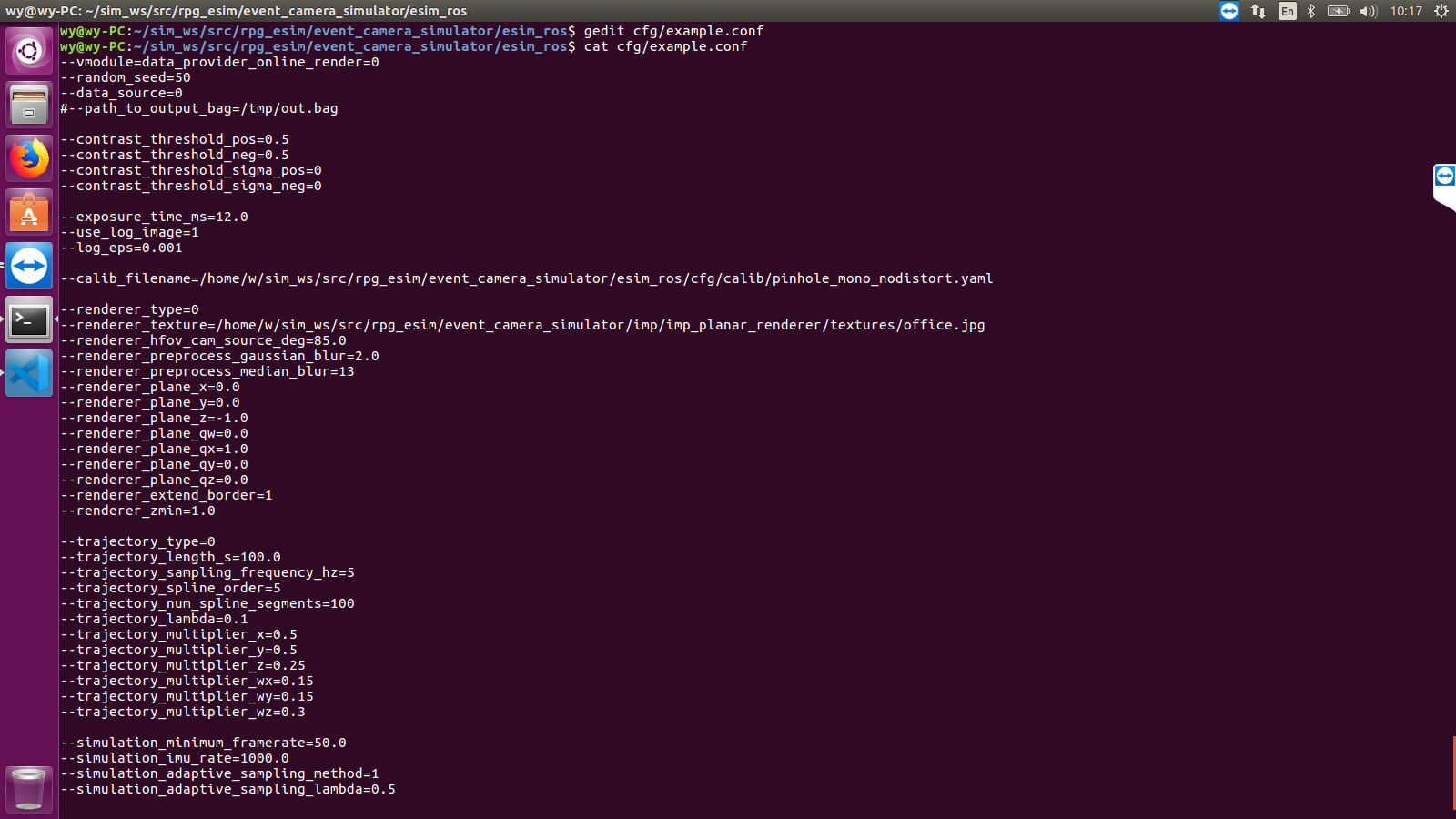
然后运行这个节点(如果这里出了错,需要先看看是不是上面文件的路径弄错了)
roslaunch esim_ros esim.launch config:=cfg/example.conf
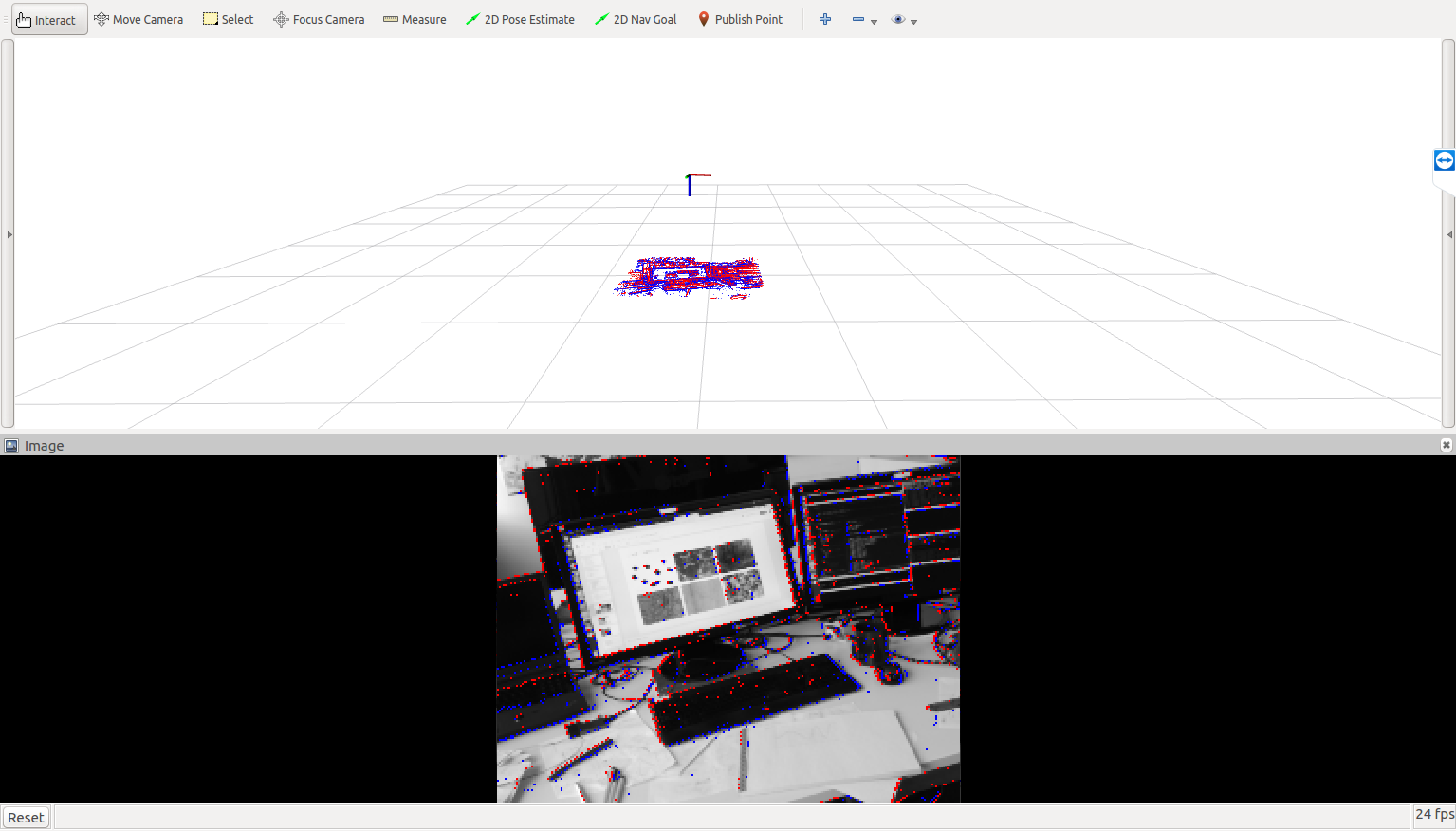
可视化如下:
roscd esim_visualization rviz -d cfg/esim.rviz