本片文章属于转载,原文出处:https://www.cnblogs.com/lang5230/p/5686868.html。
多线程代码问题描述
我们都知道,进程是操作系统对运行程序资源分配的基本单位,而线程是程序逻辑,调用的基本单位。在多线程的程序中,多个线程共享临界区资源,那么就会有问题:
比如
#include <pthread.h>
#include <unistd.h>
#include <stdio.h>
#include <stdlib.h>
int g_val = 10;
void * test1(void* args)
{
g_val = 20;
printf("in %s: g_val = %d\n",__func__, g_val);
}
void * test2(void* args)
{
sleep(1);
printf("in %s: g_val = %d\n",__func__,g_val);
}
int main(int argc, char const *argv[])
{
pthread_t id1,id2;
pthread_create(&id1,NULL,test1,NULL);
pthread_create(&id2,NULL,test2,NULL);
pthread_join(id1,NULL);
pthread_join(id2,NULL);
return 0;
}由次我们可以看到,线程1修改了全局变量,而线程2中页跟着改变了。
那么,对于这个问题进行放大,我们就会找到多线程存在的问题。如下
#include <stdio.h>
#include <pthread.h>
// pthread_mutex_t lock = PTHREAD_MUTEX_INITIALIZER;
int g_val = 0;
void* add(void *argv)
{
for(int i = 0 ; i < 5000; ++i)
{
// g_val++;
// pthread_mutex_lock(&lock);
int tmp = g_val;
g_val = tmp+1;
// pthread_mutex_unlock(&lock);
}
}
int main(int argc, char const *argv[])
{
pthread_t id1,id2;
pthread_create(&id1,NULL,add,NULL);
pthread_create(&id2,NULL,add,NULL);
pthread_join(id1,NULL);
pthread_join(id2,NULL);
printf("%d\n",g_val);
return 0;
}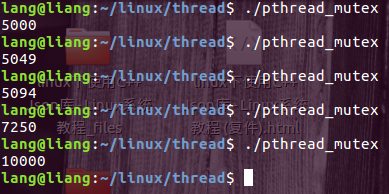
在上面代码中,我们执行两个线程分别对全局变量累加5000次,但是得到的结果却是不确定的。这是因为,在多线程程序中,线程调度使得线程间进行切换执行,如果当线程1将数据从内存读入cpu正在准备累加时,调度器切换线程2执行,此时,线程2获取的值是未累加的。那么,当两个线程都执行完本次累加后,实际值只增加了1。所以就会产生多次执行,结果不确定性。
注:代码中没有直接g_val++,而选择了tmp过度就是为了产生非原子操作,让调度过程处于累加未完时。
那么解决这个问题,就需要互斥操作了。
我们首先来谈互斥量mutex
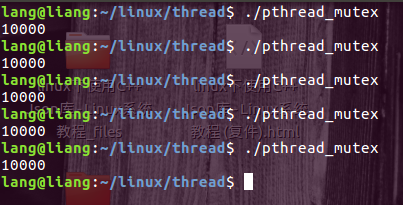
通过互斥量实现线程锁,在每个线程累加之前,进行临界资源的锁操作,在结束时解锁,那么就能保证目标的实现了。
#include <stdio.h>
#include <pthread.h>
pthread_mutex_t lock = PTHREAD_MUTEX_INITIALIZER;
int g_val = 0;
void* add(void *argv)
{
for(int i = 0 ; i < 5000; ++i)
{
// g_val++;
pthread_mutex_lock(&lock);
int tmp = g_val;
g_val = tmp+1;
pthread_mutex_unlock(&lock);
}
}
int main(int argc, char const *argv[])
{
pthread_t id1,id2;
pthread_create(&id1,NULL,add,NULL);
pthread_create(&id2,NULL,add,NULL);
pthread_join(id1,NULL);
pthread_join(id2,NULL);
printf("%d\n",g_val);
return 0;
}
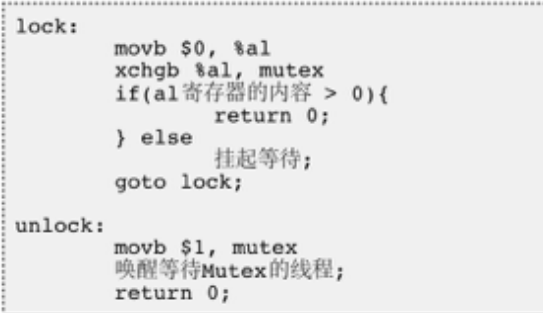
关于互斥锁的实现,在linux中实现如下
条件变量
问题场景描述
假设我们现在需要做一个生产者消费者模型,生产者对带有头节点的链表头插方式push_front生产数据,消费者调用pop_front消费数据.而生产者可能动作比较慢,这时就会有问题。
生产者生产一个数据时间,消费者可能迫切需求。因此,一直轮寻申请锁资源,以便进行消费。所以就会产生多次不必的锁资源申请释放动作。影响系统性能。
#include <stdio.h>
#include <unistd.h>
#include <stdlib.h>
#include <pthread.h>
pthread_mutex_t lock = PTHREAD_MUTEX_INITIALIZER;
pthread_cond_t cond = PTHREAD_COND_INITIALIZER;
typedef struct node
{
int _data;
struct node *_next;
}node_t,* node_p,**node_pp;
node_p head = NULL;
node_p alloc_node(int data)
{
node_p ret = (node_p)malloc(sizeof(node_t));
ret->_data = data;
ret->_next = NULL;
return ret;
}
void init(node_pp phead)
{
*phead = alloc_node(0);
}
void push_front(node_p head,int data)
{
node_p tmp = alloc_node(data);
tmp->_next = head->_next;
head->_next = tmp;
}
void pop_front(node_p head, int * pdata)
{
if(head->_next!=NULL)
{
node_p tmp = head->_next;
head->_next = tmp->_next;
*pdata = tmp->_data;
free(tmp);
}
}
void show(node_p head)
{
node_p cur = head->_next;
while(cur)
{
printf("%d->", cur->_data);
cur = cur->_next;
}
printf("\n");
}
//消费者
void * consumer(void *argv)
{
int data;
while(1)
{
pthread_mutex_lock(&lock);
// while(head->_next==NULL)
if(head->_next==NULL)
{
printf("producter is not ready\n");
// pthread_cond_wait(&cond,&lock);
// break;
}
else{
printf("producter is ready...\n");
pop_front(head,&data);
printf("%s data = %d \n",__func__, data);
}
pthread_mutex_unlock(&lock);
sleep(1);
}
}
void * producter(void * argv)
{
int data = rand()%1234;
while(1)
{
sleep(4);
pthread_mutex_lock(&lock);
push_front(head,data);
printf("%s data :: %d\n",__func__, data);
pthread_mutex_unlock(&lock);
// pthread_cond_signal(&cond);
}
}
int main(int argc, char const *argv[])
{
init(&head);
pthread_t id1,id2;
pthread_create(&id1,NULL,consumer,NULL);
pthread_create(&id2,NULL,producter,NULL);
pthread_join(id1,NULL);
pthread_join(id2,NULL);
}
由上,我们发现。生产者生叉一个数据之后,消费者总是会多次进行锁资源申请并尝试消费数据。那么,解决这一问题的方案就是:条件变量。
具体实现如下:
#include <stdio.h>
#include <unistd.h>
#include <stdlib.h>
#include <pthread.h>
pthread_mutex_t lock = PTHREAD_MUTEX_INITIALIZER;
pthread_cond_t cond = PTHREAD_COND_INITIALIZER;
typedef struct node
{
int _data;
struct node *_next;
}node_t,* node_p,**node_pp;
node_p head = NULL;
node_p alloc_node(int data)
{
node_p ret = (node_p)malloc(sizeof(node_t));
ret->_data = data;
ret->_next = NULL;
return ret;
}
void init(node_pp phead)
{
*phead = alloc_node(0);
}
void push_front(node_p head,int data)
{
node_p tmp = alloc_node(data);
tmp->_next = head->_next;
head->_next = tmp;
}
void pop_front(node_p head, int * pdata)
{
if(head->_next!=NULL)
{
node_p tmp = head->_next;
head->_next = tmp->_next;
*pdata = tmp->_data;
free(tmp);
}
}
void show(node_p head)
{
node_p cur = head->_next;
while(cur)
{
printf("%d->", cur->_data);
cur = cur->_next;
}
printf("\n");
}
//消费者
void * consumer(void *argv)
{
int data;
while(1)
{
pthread_mutex_lock(&lock);
while(head->_next==NULL)
// if(head->_next==NULL)
{
printf("producter is not ready\n\n");
pthread_cond_wait(&cond,&lock);
break;
}
// else{
// printf("producter is ready...\n");
pop_front(head,&data);
printf("%s data = %d \n",__func__, data);
// }
pthread_mutex_unlock(&lock);
sleep(1);
}
}
void * producter(void * argv)
{
int data = rand()%1234;
while(1)
{
sleep(4);
pthread_mutex_lock(&lock);
push_front(head,data);
printf("%s data :: %d\n",__func__, data);
pthread_mutex_unlock(&lock);
pthread_cond_signal(&cond); //条件变量v操作
}
}
int main(int argc, char const *argv[])
{
init(&head);
pthread_t id1,id2;
pthread_create(&id1,NULL,consumer,NULL);
pthread_create(&id2,NULL,producter,NULL);
pthread_join(id1,NULL);
pthread_join(id2,NULL);
}
由图可以看出,这下我们的消费者不再进行过多次没必要的轮寻访问,当生产者生产数据时,告诉消费者可以进行消费了,那么消费者进行消费。
其实这也就是著名的:好莱坞原则---不要打电话给我们,我们会通知你。
eg,在面试笔试中,我们不需要过度的紧张是否被录用,只需要在做到最大努力之后等着招聘方通知就好。
注:一个Condition Variable总是和一个Mutex搭配使用的。一个线程可以调用
pthread_cond_wait在一一个Condition Variable上阻塞等待,这个函数做以下三步操作:
1. 释放Mutex。
2. 阻塞等待。
3. 当被唤醒时,重新获得Mutex并返回。