CUBE配置
CAN参数配置
- 配置引脚PD0 PD1为CAN功能。
- 在Connectivity->CAN1中勾选Master Mode。
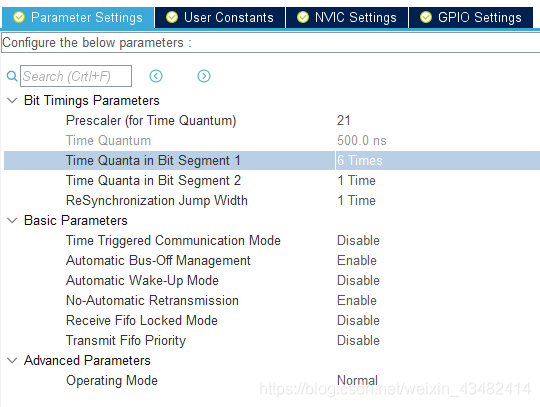
- 在ParameterSettings中配置:
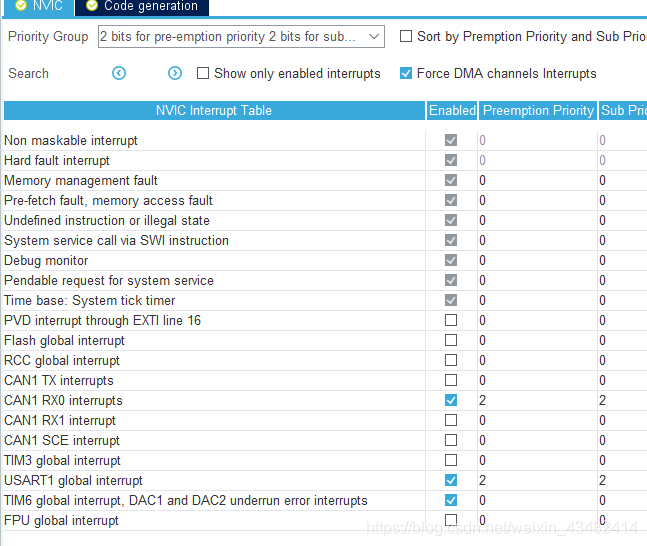
- NVIC Settings中勾选RX0中断
- 在NVIC中配置CAN1中断组为2 2
- 点击生成代码
修改代码
#include "bsp_can.h"
#include "main.h"
#define CAN1FIFO CAN_RX_FIFO0
#define CAN1FIF1 CAN_RX_FIFO1
CAN_TxHeaderTypeDef TxMeg;
CAN_RxHeaderTypeDef RxMeg;
void bsp_can_init(CAN_HandleTypeDef *hcan)
{
uint16_t std_id;
uint32_t ext_id=0x1800F001;
uint32_t mask;
CAN_FilterTypeDef sFilterConfig;
HAL_StatusTypeDef HAL_Status;
if(hcan->Instance == CAN1)
{
sFilterConfig.FilterMode = CAN_FILTERMODE_IDMASK; //工作在标识符屏蔽位模式
sFilterConfig.FilterScale = CAN_FILTERSCALE_32BIT;//滤波器位宽为单个32位
sFilterConfig.FilterIdHigh =0X0000;
sFilterConfig.FilterIdLow =0X0000;
//过滤屏蔽码
sFilterConfig.FilterMaskIdHigh = 0X0000;
sFilterConfig.FilterMaskIdLow = 0X0000;
sFilterConfig.FilterFIFOAssignment=CAN_FilterFIFO0;
sFilterConfig.FilterBank=0x00;
sFilterConfig.SlaveStartFilterBank=0x14;
sFilterConfig.FilterActivation=ENABLE;
HAL_Status = HAL_CAN_ConfigFilter(hcan, &sFilterConfig);
HAL_Status = HAL_CAN_Start(hcan); //开启CAN
if(HAL_Status != HAL_OK)
{
// PRINTF("开启CAN失败\r\n");
}
HAL_Status = HAL_CAN_ActivateNotification(hcan,CAN_IT_RX_FIFO0_MSG_PENDING);
}
}
void HAL_CAN_RxFifo0MsgPendingCallback(CAN_HandleTypeDef *hcan) //接收回调函数
{
uint8_t recvData[8],j;
HAL_StatusTypeDef HAL_Status;
if(hcan->Instance == CAN1)
{
HAL_Status = HAL_CAN_GetRxMessage(hcan, CAN_RX_FIFO0, &RxMeg, recvData);
if ( HAL_Status == HAL_OK) //在这里接收数据
{
/*
接受回调函数
*/
}
}
}
extern __IO uint32_t uwTick;
void CanDelay(uint16_t cnt)
{
uint32_t curCnt=uwTick;
while(uwTick>=curCnt && (uwTick-curCnt)/2>cnt)
{
}
}
//发送数据函数
uint8_t CANx_SendNormalData(CAN_HandleTypeDef *hcanX, uint16_t ID, uint8_t *pData, uint16_t Len)
{
HAL_StatusTypeDef HAL_RetVal;
uint16_t SendTimes, SendCNT = 0;
uint8_t FreeTxNum = 0;
TxMeg.StdId = ID;
if(!hcanX || ! pData || !Len) return 1;
SendTimes = Len / 8 + (Len % 8 ? 1 : 0);
FreeTxNum = HAL_CAN_GetTxMailboxesFreeLevel(hcanX);
TxMeg.DLC = 8;
while(SendTimes--)
{
if(0 == SendTimes)
{
if(Len % 8)
TxMeg.DLC = Len % 8;
}
FreeTxNum = HAL_CAN_GetTxMailboxesFreeLevel(hcanX);
while(0 == FreeTxNum)
{
CanDelay(1);
FreeTxNum = HAL_CAN_GetTxMailboxesFreeLevel(hcanX);
if(0 == FreeTxNum)
{
// PRINTF("?");
return 2;
}
}
//HAL_Delay(1); //没有延时很有可能会发送失败
CanDelay(1);
HAL_RetVal = HAL_CAN_AddTxMessage(hcanX, &TxMeg, pData + SendCNT, (uint32_t *)CAN_TX_MAILBOX0);
if(HAL_RetVal != HAL_OK)
{
return 2;
}
SendCNT += 8;
}
return 0;
}
CANx_SendNormalData(&hcan1, 0x01, buf, 8);
