-
1. install
https://github.com/ccxslam/rpg_trajectory_evaluation#install
下载catkin_simple:https://github.com/catkin/catkin_simple 建立工作空间 src下载,编译,然后下载rpg_trajectory_evaluatio,编译安装即可。
-
2.固定文件格式
stamped_groundtruth.txt: groundtruth poses with timestampsstamped_traj_estimate.txt: estimated poses with timestamps- (optional)
eval_cfg.yaml: specify evaluation parameters
groundtruth 格式:
# timestamp tx ty tz qx qy qz qw
3.Evaluation parameters
Currently eval_cfg.yaml specifies two parameters for trajectory alignment (used in absolute errors):
align_type:sim3: a similarity transformation (for vision-only monocular case)se3: a rigid body transformation (for vision-only stereo case)posyaw: a translation plus a rotation around gravity (for visual-inertial case)none: do not align the trajectory
align_num_frames: the number of poses (starting from the beginning) that will be used in the trajectory alignment.-1means all poses will be used.
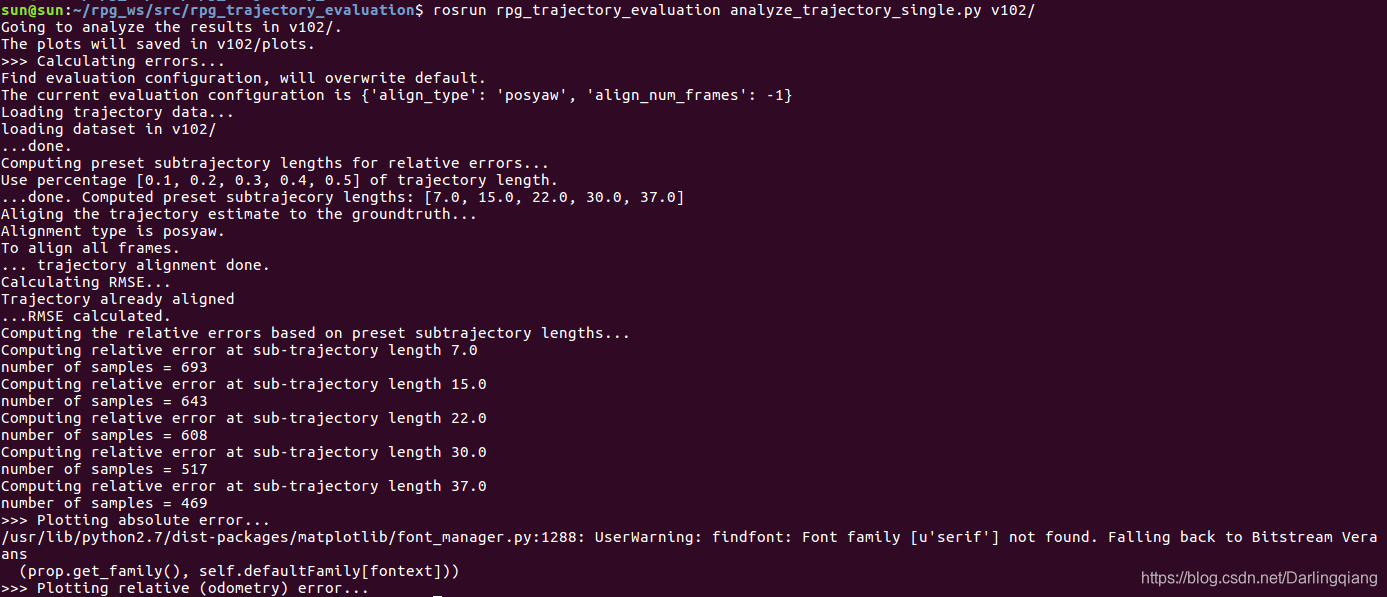
4 . Single trajectory estimate
As a ROS package, run
rosrun rpg_trajectory_evaluation analyze_trajectory_single.py <result_folder>
or as a standalone package, run
python2 analyze_trajectory_single.py <result_folder>
<result_folder> should contain the groundtruth, trajectory estimate and optionally the evaluation configuration as mentioned above.
待续。。。。。
