FROM
- 功能为指定基础镜像,并且必须是第一条指令。
- 如果不以任何镜像为基础,那么写法为:FROM scratch。
- 同时意味着接下来所写的指令将作为镜像的第一层开始
语法:
- FROM < image >
- FROM < image >:< tag >
- FROM < image >:< digest>
三种写法,其中< tag >和< digest > 是可选项,如果没有选择,那么默认值为latest
RUN
-
功能为运行指定的命令
-
RUN命令有两种格式
- RUN < command >
- RUN [“executable”, “param1”, “param2”]
第一种后边直接跟shell命令
-
在linux操作系统上默认 /bin/sh -c
-
在windows操作系统上默认 cmd /S /C
-
第二种是类似于函数调用。
-
可将executable理解成为可执行文件,后面就是两个参数。
两种写法比对:
-
RUN /bin/bash -c 'source $HOME/.bashrc; echo $HOME
-
RUN ["/bin/bash", “-c”, “echo hello”]
注意:多行命令不要写多个RUN,原因是Dockerfile中每一个指令都会建立一层. -
多少个RUN就构建了多少层镜像,会造成镜像的臃肿、多层,不仅仅增加了构件部署的时间,还容易出错。
-
RUN书写时的换行符是\
CMD
- 功能为容器启动时要运行的命令
语法有三种写法:
- CMD [“executable”,“param1”,“param2”]
- CMD [“param1”,“param2”]
- CMD command param1 param2
第三种比较好理解了,就是 shell 的执行方式和写法
第一种和第二种都是可执行文件加上参数的形式
举例说明两种写法:
- CMD [ “sh”, “-c”, “echo $HOME”
- CMD [ “echo”, “$HOME” ]
补充细节:这里边包括参数的一定要用双引号,就是",不能是单引号。千万不能写成单引号。
原因是参数传递后,docker解析的是一个JSON array
RUN & CMD
-
不要把RUN和CMD搞混了。
-
RUN是构件容器时就运行的命令以及提交运行结果
-
CMD是容器启动时执行的命令,在构件时并不运行,构件时紧紧指定了这个命令到底是个什么样子
LABEL
- 功能是为镜像指定标签
语法:
- LABEL < key >=< value > < key >=< value > < key >=< value > …
一个Dockerfile种可以有多个LABEL,如下: - LABEL “com.example.vendor”=“ACME Incorporated”
- LABEL com.example.label-with-value=“foo”
- LABEL version=“1.0”
- LABEL description=“This text illustrates that label-values can span multiple lines.”
但是并不建议这样写,最好就写成一行,如太长需要换行的话则使用\符号,例如:
- LABEL multi.label1=“value1”
multi.label2=“value2”
other=“value3”
说明:LABEL会继承基础镜像种的LABEL,如遇到key相同,则值覆盖
MAINTAINER
- 指定作者
语法:
- MAINTAINER < name >
EXPOSE
- 功能为暴漏容器运行时的监听端口给外部
- 但是EXPOSE并不会使容器访问主机的端口
- 如果想使得容器与主机的端口有映射关系,必须在容器启动的时候加上 -P参数
ENV
- 功能为设置环境变量
语法有两种:
- ENV < key > < value >
- ENV < key >=< value > …
两者的区别就是第一种是一次设置一个,第二种是一次设置多个
ADD
-
一个复制命令,把文件复制到景象中。
-
如果把虚拟机与容器想象成两台linux服务器的话,那么这个命令就类似于scp,只是scp需要加用户名和密码的权限验证,而ADD不用。
语法如下:
- ADD < src >… < dest >
- ADD ["< src >",… “< dest >”]
< dest >路径的填写可以是容器内的绝对路径,也可以是相对于工作目录的相对路径
< src >可以是一个本地文件或者是一个本地压缩文件,还可以是一个url
如果把< src >写成一个url,那么ADD就类似于wget命令
如以下写法都是可以的:
- ADD test relativeDir/
- ADD test /relativeDir
- ADD http://example.com/foobar /
尽量不要把< src >写成一个文件夹,如果< src >是一个文件夹,则会复制整个目录的内容,包括文件系统元数据
COPY
- 看这个名字就知道,又是一个复制命令
语法如下:
- COPY < src >… < dest >
- COPY ["< src >",… “< dest >”]
与ADD的区别:
- COPY的只能是本地文件,其他用法一致
ENTRYPOINT
- 功能是启动时的默认命令
语法如下:
- ENTRYPOINT [“executable”, “param1”, “param2”]
- ENTRYPOINT command param1 param2
如果从上到下看到这里的话,那么你应该对这两种语法很熟悉啦。
第二种是写shell
第一种是可执行文件加参数
与CMD比较说明(这俩命令太像了,而且还可以配合使用):
- 相同点:
- 只能写一条,如果写了多条,那么只有最后一条生效
- 容器启动时才运行,运行时机相同
- 不同点:
- ENTRYPOINT不会被运行的command覆盖,而CMD则会被覆盖
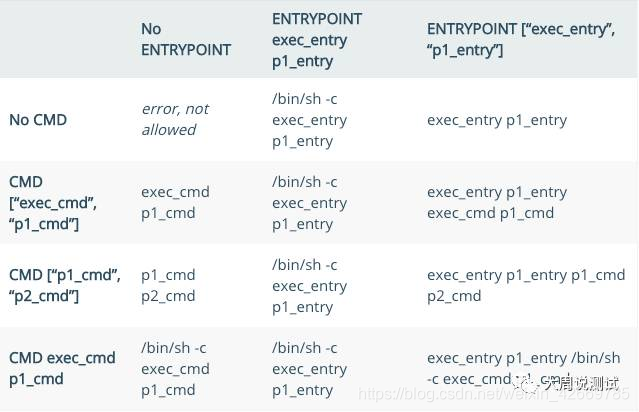
如果我们在Dockerfile种同时写了ENTRYPOINT和CMD,并且CMD指令不是一个完整的可执行命令,那么CMD指定的内容将会作为ENTRYPOINT的参数,例如:
FROM ubuntu
ENTRYPOINT ["top", "-b"]
CMD ["-c"]
如果我们在Dockerfile种同时写了ENTRYPOINT和CMD,并且CMD是一个完整的指令,那么它们两个会互相覆盖,谁在最后谁生效,例如:
FROM ubuntu
ENTRYPOINT ["top", "-b"]
CMD ls -al
那么将执行ls -al ,top -b不会执行。
Docker官方使用一张表格来展示了ENTRYPOINT 和CMD不同组合的执行情况:
VOLUME
- 可实现挂载功能,可以将内地文件夹或者其他容器种得文件夹挂在到这个容器种
语法为:
- VOLUME ["/data"]
说明:
["/data"]可以是一个JsonArray ,也可以是多个值。所以以下几种写法都是正确的:
- VOLUME ["/var/log/"]
- VOLUME /var/log
- VOLUME /var/log /var/db
一般的使用场景为需要持久化存储数据时,容器使用的是AUFS,这种文件系统不能持久化数据,当容器关闭后,所有的更改都会丢失,所以当数据需要持久化时用这个命令。
USER
-
设置启动容器的用户,可以是用户名或UID,所以,只有下面的两种写法是正确的:
-
USER daemo
-
USER UID
注意:如果设置了容器以daemon用户去运行,那么RUN, CMD 和 ENTRYPOINT 都会以这个用户去运行
WORKDIR
语法:
- WORKDIR /path/to/workdir
设置工作目录,对RUN,CMD,ENTRYPOINT,COPY,ADD生效。如果不存在则会创建,也可以设置多次。
例如:
- WORKDIR /a
- WORKDIR b
- WORKDIR c
- RUN pwd
pwd执行的结果是/a/b/c
WORKDIR也可以解析环境变量
例如:
- ENV DIRPATH /path
- WORKDIR DIRNAME
- RUN pwd
pwd的执行结果是/path/$DIRNAME
ARG
语法:
- ARG < name >[=< default value >]
设置变量命令,ARG命令定义了一个变量,在docker build创建镜像的时候,使用 --build-arg < varname >=< value >来指定参数
如果用户在build镜像时指定了一个参数没有定义在Dockerfile种,那么将有一个Warning
提示如下:
[Warning] One or more build-args [foo] were not consumed.
我们可以定义一个或多个参数,例如:
- FROM busybox
- ARG user1
- ARG buildno
…
也可以给参数一个默认值: - FROM busybox
- ARG user1=someuser
- ARG buildno=1
…
如果我们给了ARG定义的参数默认值,那么当build镜像时没有指定参数值,将会使用这个默认值
ONBUILD
语法:
- ONBUILD [INSTRUCTION]
这个命令只对当前镜像的子镜像生效。
比如当前镜像为A,在Dockerfile种添加:
- ONBUILD RUN ls -al
这个 ls -al 命令不会在A镜像构建或启动的时候执行
此时有一个镜像B是基于A镜像构建的,那么这个ls -al 命令会在B镜像构建的时候被执行。
STOPSIGNAL
语法:
- STOPSIGNAL signal
- STOPSIGNAL命令是的作用是当容器推出时给系统发送什么样的指令
HEALTHCHECK
- 容器健康状况检查命令
语法有两种:
- HEALTHCHECK [OPTIONS] CMD command
- HEALTHCHECK NONE
第一个的功能是在容器内部运行一个命令来检查容器的健康状况
第二个的功能是在基础镜像中取消健康检查命令
[OPTIONS]的选项支持以下三中选项:
--interval=DURATION 两次检查默认的时间间隔为30秒
--timeout=DURATION 健康检查命令运行超时时长,默认30秒
--retries=N 当连续失败指定次数后,则容器被认为是不健康的,状态为unhealthy,默认次数是3
注意:
HEALTHCHECK命令只能出现一次,如果出现了多次,只有最后一个生效。
CMD后边的命令的返回值决定了本次健康检查是否成功,具体的返回值如下:
0: success - 表示容器是健康的
1: unhealthy - 表示容器已经不能工作了
2: reserved - 保留值
例子:
HEALTHCHECK --interval=5m --timeout=3s
CMD curl -f http://localhost/ || exit 1
健康检查命令是:curl -f http://localhost/ || exit 1
两次检查的间隔时间是5秒
命令超时时间为3秒
By the way
有问题?可以给我留言或私聊
有收获?那就顺手点个赞呗~
当然,也可以到我的公众号下「6曦轩」,输入“学习”,即可领取一份
【Java工程师进阶架构师的视频教程】~
由于我咧,科班出身的程序员,php,Android以及硬件方面都做过,不过最后还是选择专注于做 Java,所以有啥问题可以到公众号提问讨论(技术情感倾诉都可以哈哈哈),看到的话会尽快回复,希望可以跟大家共同学习进步,关于服务端架构,Java 核心知识解析,职业生涯,面试总结等文章会不定期坚持推送输出,欢迎大家关注~~~
