1,开发板:STM32F103C8T6最小系统开发板。
2,开发环境:Keil uv5
3,参考文献:https://blog.csdn.net/wzs298/article/details/12228481
移植ENC28J60这个网络模块可谓是困难重重啊,。。。。。找了很多个例子都没有成功的,只能说很坑很坑,我不知道网上为什么那么多人抄袭, ,没有经过自己验证就copy出来。。。。捣鼓了一天终于把这个坑爹的模块搞定了,,,,
,没有经过自己验证就copy出来。。。。捣鼓了一天终于把这个坑爹的模块搞定了,,,,
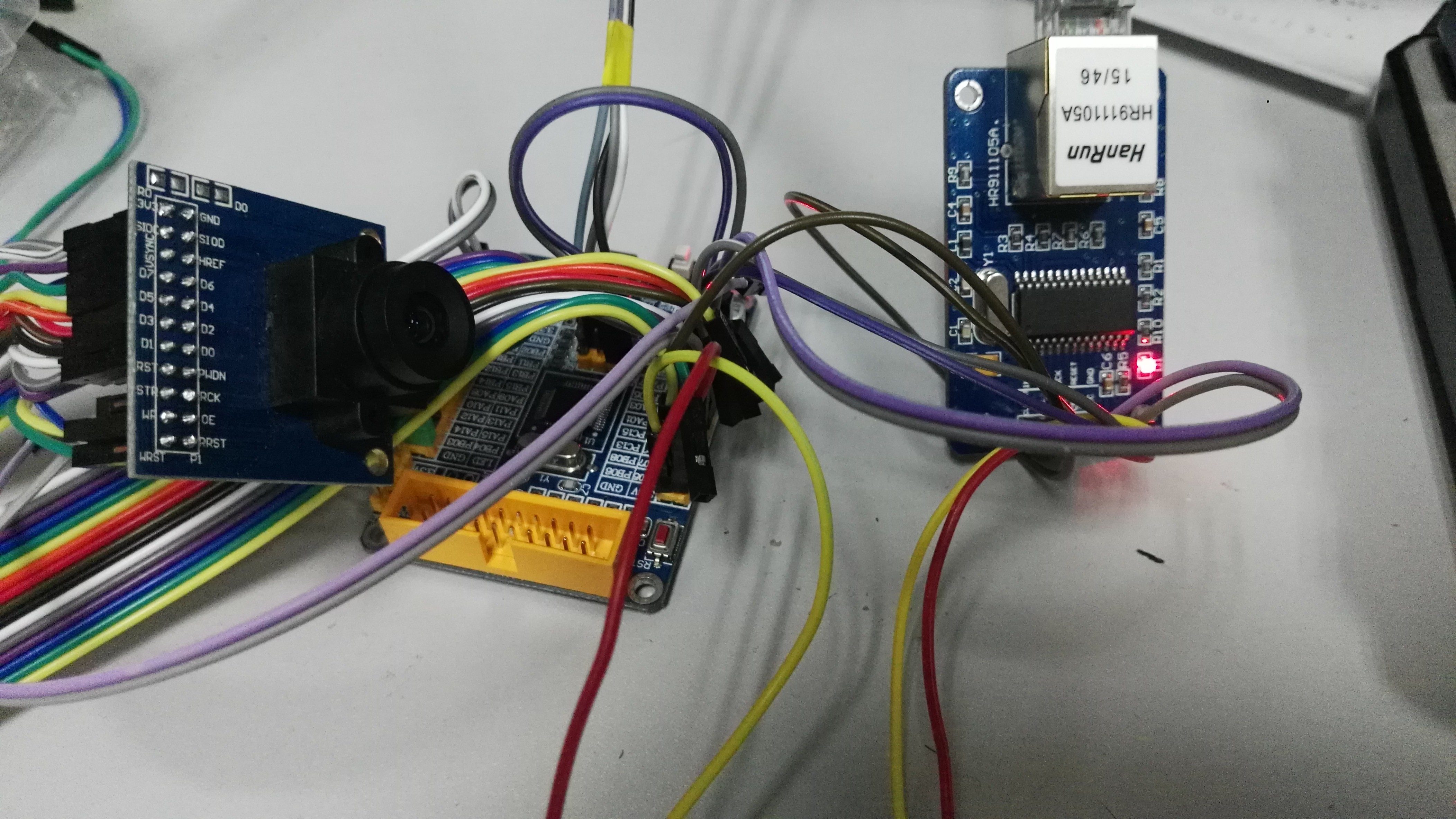
先来贴一张图片 :
:
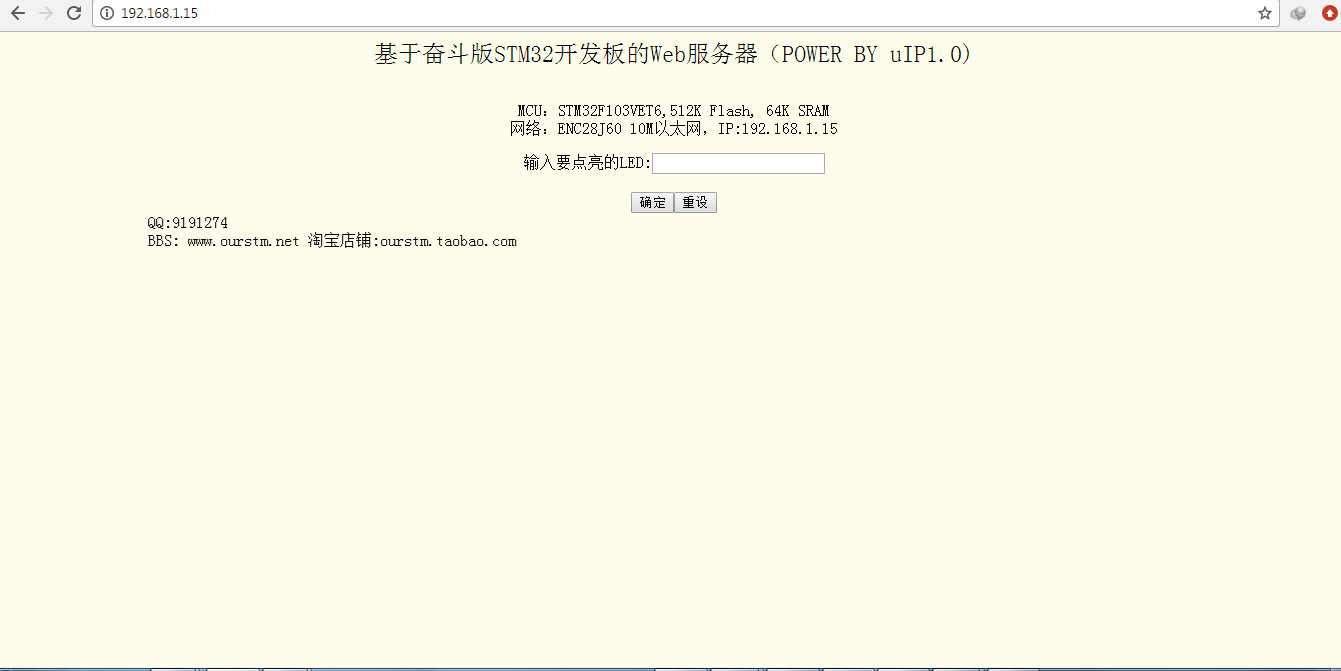
本例程移植uIP-1.0协议栈,演示开发板和PC间的TCP通信。自定义了一个简单的应用层
通信协议。本例程实现的功能有:
(1)通过PC机控制板子上的LED;
(2)实现了一个简单的Web服务器。
选用的网卡芯片ENC28J60,10M带宽。
本例程设置的缺省IP地址是 192.168.1.15,默认的TCP服务器监听端口是1200, WEB服务器监听端口80,
UDP服务器监听端口2000。
开发板工作在TCP服务器模式。PC机工作在TCP客户端模式。
PC机上需要运行网络调试助手软件。
用户可以做如下测试:
(1)ping 试验 (ICMP)
点击windows 开始-运行,执行cmd命令,然后在dos窗口输入 ping 192.168.1.15
应该看到如下结果:
Reply from 192.168.1.15: bytes=32 time<1ms TTL=128
Reply from 192.168.1.15: bytes=32 time<1ms TTL=128
Reply from 192.168.1.15: bytes=32 time<1ms TTL=128
Reply from 192.168.1.15: bytes=32 time<1ms TTL=128
遇到的问题:
1、模块引脚的连接方式
一般接线为:(左边主设备,右边从设备):
SPIx_nSS(PA4)======CS
SPIx_SCK(PA5)======SCK
SPIx_MISO(PA6)======SDO(SO)
SPIx_MOSI(PA7)======SDI(SI)
PA1===========INT
其中很多教程都没提到要连接INT引脚,测试发现,没有连接该引脚,无法初始化!!!
2、SPI初始化方式,网上流行的很多方式都试过,都存在各种各样的问题,需要的朋友我把文件放到了本文末尾,需要的同学可以自行下载~~~
以上两个问题可以把人搞的晕头转向,还好我手头有示波器,示波器真是个好帮手~~~~~~
ENC28J60.c文件如下(如需要完整的工程,请点击本文末尾的下载连接下载,下载之后按照工程说明连接好引脚即可下载到开发板,非常方便,1000%成功!!!!!!!!!)
#include "ENC28J60.h"
#include "spi.h"
#include "uip.h"
#include <stdio.h>
#include "uart.h"
#include "delay.h"
static uint8_t Enc28j60Bank;
static uint16_t gNextPacketPtr;
static uint8_t erxfcon;
unsigned char ENC28J60_SendByte(unsigned char dt)
{
while(SPI_I2S_GetFlagStatus(SPI1, SPI_I2S_FLAG_TXE) == RESET);
SPI_I2S_SendData(SPI1, dt);
while(SPI_I2S_GetFlagStatus(SPI1, SPI_I2S_FLAG_RXNE) == RESET);
return SPI_I2S_ReceiveData(SPI1);
}
uint8_t enc28j60ReadOp(uint8_t op, uint8_t address)
{
uint8_t temp;
enableChip;
// issue read command
ENC28J60_SendByte(op | (address & ADDR_MASK));
temp = ENC28J60_SendByte(0xFF);
if (address & 0x80)
temp = ENC28J60_SendByte(0xFF);
// release CS
disableChip;
return temp;
}
void enc28j60WriteOp(uint8_t op, uint8_t address, uint8_t data)
{
enableChip;
ENC28J60_SendByte(op | (address & ADDR_MASK));
ENC28J60_SendByte(data);
disableChip;
}
void enc28j60PowerDown()
{
enc28j60WriteOp(ENC28J60_BIT_FIELD_CLR, ECON1, ECON1_RXEN);
while(enc28j60Read(ESTAT) & ESTAT_RXBUSY);
while(enc28j60Read(ECON1) & ECON1_TXRTS);
enc28j60WriteOp(ENC28J60_BIT_FIELD_SET, ECON2, ECON2_PWRSV);
}
void enc28j60PowerUp()
{
enc28j60WriteOp(ENC28J60_BIT_FIELD_CLR, ECON2, ECON2_PWRSV);
while(!enc28j60Read(ESTAT) & ESTAT_CLKRDY);
}
void enc28j60ReadBuffer(uint16_t len, uint8_t *data)
{
enableChip;
ENC28J60_SendByte(ENC28J60_READ_BUF_MEM);
while (len--)
{
*data++ = ENC28J60_SendByte(0x00);
}
disableChip;
// Remove next line suggested by user epam - not needed
// *data='\0';
}
static uint16_t enc28j60ReadBufferWord()
{
uint16_t result;
enc28j60ReadBuffer(2, (uint8_t *) &result);
return result;
}
void enc28j60WriteBuffer(uint16_t len, uint8_t *data)
{
enableChip;
ENC28J60_SendByte(ENC28J60_WRITE_BUF_MEM);
while (len--)
ENC28J60_SendByte(*data++);
disableChip;
}
void enc28j60SetBank(uint8_t address)
{
if ((address & BANK_MASK) != Enc28j60Bank)
{
enc28j60WriteOp(ENC28J60_BIT_FIELD_CLR, ECON1, ECON1_BSEL1 | ECON1_BSEL0);
Enc28j60Bank = address & BANK_MASK;
enc28j60WriteOp(ENC28J60_BIT_FIELD_SET, ECON1, Enc28j60Bank >> 5);
}
}
uint8_t enc28j60Read(uint8_t address)
{
// set the bank
enc28j60SetBank(address);
// do the read
return enc28j60ReadOp(ENC28J60_READ_CTRL_REG, address);
}
void enc28j60WriteWord(uint8_t address, uint16_t data)
{
enc28j60Write(address, data & 0xff);
enc28j60Write(address + 1, data >> 8);
}
// read upper 8 bits
uint16_t enc28j60PhyReadH(uint8_t address)
{
// Set the right address and start the register read operation
enc28j60Write(MIREGADR, address);
enc28j60Write(MICMD, MICMD_MIIRD);
delay_us(15);
// wait until the PHY read completes
while(enc28j60Read(MISTAT) & MISTAT_BUSY);
// reset reading bit
enc28j60Write(MICMD, 0x00);
return (enc28j60Read(MIRDH));
}
void enc28j60Write(uint8_t address, uint8_t data)
{
// set the bank
enc28j60SetBank(address);
// do the write
enc28j60WriteOp(ENC28J60_WRITE_CTRL_REG, address, data);
}
void enc28j60PhyWrite(uint8_t address, uint16_t data)
{
// set the PHY register address
enc28j60Write(MIREGADR, address);
// write the PHY data
enc28j60Write(MIWRL, data);
enc28j60Write(MIWRH, data >> 8);
// wait until the PHY write completes
while(enc28j60Read(MISTAT) & MISTAT_BUSY)
{
delay_us(15);
}
}
/*
static void enc28j60PhyWriteWord(byte address, word data) {
enc28j60Write(MIREGADR, address);
//enc28j60WriteByte(MIREGADR, address);
enc28j60WriteWord(MIWRL, data);
while (enc28j60ReadByte(MISTAT) & MISTAT_BUSY)
;
}
*/
void enc28j60clkout(uint8_t clk)
{
//setup clkout: 2 is 12.5MHz:
enc28j60Write(ECOCON, clk & 0x7);
}
void enc28j60Init( uint8_t *macaddr )
{
enableChip; // ss=0
// perform system reset
enc28j60WriteOp(ENC28J60_SOFT_RESET, 0, ENC28J60_SOFT_RESET);
delay_ms(50);
// check CLKRDY bit to see if reset is complete
// The CLKRDY does not work. See Rev. B4 Silicon Errata point. Just wait.
//while(!(enc28j60Read(ESTAT) & ESTAT_CLKRDY));
// do bank 0 stuff
// initialize receive buffer
// 16-bit transfers, must write low byte first
// set receive buffer start address
gNextPacketPtr = RXSTART_INIT;
// Rx start
enc28j60WriteWord(ERXSTL, RXSTART_INIT);
// set receive pointer address
enc28j60WriteWord(ERXRDPTL, RXSTART_INIT);
// RX end
enc28j60WriteWord(ERXNDL, RXSTOP_INIT);
// TX start
enc28j60WriteWord(ETXSTL, TXSTART_INIT);
// TX end
enc28j60WriteWord(ETXNDL, TXSTOP_INIT);
// do bank 1 stuff, packet filter:
// For broadcast packets we allow only ARP packtets
// All other packets should be unicast only for our mac (MAADR)
//
// The pattern to match on is therefore
// Type ETH.DST
// ARP BROADCAST
// 06 08 -- ff ff ff ff ff ff -> ip checksum for theses bytes=f7f9
// in binary these poitions are:11 0000 0011 1111
// This is hex 303F->EPMM0=0x3f,EPMM1=0x30
//enc28j60Write(ERXFCON, ERXFCON_UCEN|ERXFCON_CRCEN|ERXFCON_PMEN);
//Change to add ERXFCON_BCEN recommended by epam
//enc28j60Write(ERXFCON, ERXFCON_UCEN|ERXFCON_CRCEN|ERXFCON_PMEN|ERXFCON_BCEN);
erxfcon = ERXFCON_UCEN | ERXFCON_CRCEN | ERXFCON_PMEN | ERXFCON_BCEN;
enc28j60Write(ERXFCON, erxfcon );
enc28j60WriteWord(EPMM0, 0x303f);
enc28j60WriteWord(EPMCSL, 0xf7f9);
//
// do bank 2 stuff
// enable MAC receive
enc28j60Write(MACON1, MACON1_MARXEN | MACON1_TXPAUS | MACON1_RXPAUS);
// bring MAC out of reset
enc28j60Write(MACON2, 0x00);
// enable automatic padding to 60bytes and CRC operations
enc28j60WriteOp(ENC28J60_BIT_FIELD_SET, MACON3, MACON3_PADCFG0 | MACON3_TXCRCEN | MACON3_FRMLNEN); //|MACON3_FULDPX);
// set inter-frame gap (non-back-to-back)
enc28j60WriteWord(MAIPGL, 0x0C12);
// set inter-frame gap (back-to-back)
enc28j60Write(MABBIPG, 0x12);
// Set the maximum packet size which the controller will accept
// Do not send packets longer than MAX_FRAMELEN:
enc28j60WriteWord(MAMXFLL, MAX_FRAMELEN);
// do bank 3 stuff
// write MAC address
// NOTE: MAC address in ENC28J60 is byte-backward
enc28j60Write(MAADR5, macaddr[0]);
enc28j60Write(MAADR4, macaddr[1]);
enc28j60Write(MAADR3, macaddr[2]);
enc28j60Write(MAADR2, macaddr[3]);
enc28j60Write(MAADR1, macaddr[4]);
enc28j60Write(MAADR0, macaddr[5]);
// no loopback of transmitted frames
enc28j60PhyWrite(PHCON2, PHCON2_HDLDIS);
// switch to bank 0
enc28j60SetBank(ECON1);
// enable interrutps
enc28j60WriteOp(ENC28J60_BIT_FIELD_SET, EIE, EIE_INTIE | EIE_PKTIE);
// enable packet reception
enc28j60WriteOp(ENC28J60_BIT_FIELD_SET, ECON1, ECON1_RXEN);
}
// read the revision of the chip:
uint8_t enc28j60getrev(void)
{
uint8_t rev;
rev = enc28j60Read(EREVID);
// microchip forgot to step the number on the silcon when they
// released the revision B7. 6 is now rev B7. We still have
// to see what they do when they release B8. At the moment
// there is no B8 out yet
if (rev > 5) rev++;
return(rev);
}
// A number of utility functions to enable/disable broadcast and multicast bits
void enc28j60EnableBroadcast( void )
{
erxfcon |= ERXFCON_BCEN;
enc28j60Write(ERXFCON, erxfcon);
}
void enc28j60DisableBroadcast( void )
{
erxfcon &= (0xff ^ ERXFCON_BCEN);
enc28j60Write(ERXFCON, erxfcon);
}
void enc28j60EnableMulticast( void )
{
erxfcon |= ERXFCON_MCEN;
enc28j60Write(ERXFCON, erxfcon);
}
void enc28j60DisableMulticast( void )
{
erxfcon &= (0xff ^ ERXFCON_MCEN);
enc28j60Write(ERXFCON, erxfcon);
}
// link status
uint8_t enc28j60linkup(void)
{
// bit 10 (= bit 3 in upper reg)
return(enc28j60PhyReadH(PHSTAT2) && 4);
}
void enc28j60PacketSend(uint16_t len, uint8_t *packet)
{
// Check no transmit in progress
while (enc28j60ReadOp(ENC28J60_READ_CTRL_REG, ECON1) & ECON1_TXRTS)
{
// Reset the transmit logic problem. See Rev. B4 Silicon Errata point 12.
if( (enc28j60Read(EIR) & EIR_TXERIF) )
{
enc28j60WriteOp(ENC28J60_BIT_FIELD_SET, ECON1, ECON1_TXRST);
enc28j60WriteOp(ENC28J60_BIT_FIELD_CLR, ECON1, ECON1_TXRST);
}
}
// Set the write pointer to start of transmit buffer area
enc28j60WriteWord(EWRPTL, TXSTART_INIT);
// Set the TXND pointer to correspond to the packet size given
enc28j60WriteWord(ETXNDL, (TXSTART_INIT + len));
// write per-packet control byte (0x00 means use macon3 settings)
enc28j60WriteOp(ENC28J60_WRITE_BUF_MEM, 0, 0x00);
// copy the packet into the transmit buffer
enc28j60WriteBuffer(len, packet);
// send the contents of the transmit buffer onto the network
enc28j60WriteOp(ENC28J60_BIT_FIELD_SET, ECON1, ECON1_TXRTS);
// Reset the transmit logic problem. See Rev. B4 Silicon Errata point 12.
}
// just probe if there might be a packet
//uint8_t enc28j60hasRxPkt(void)
//{
// return enc28j60ReadByte(EPKTCNT) > 0;
//}
// Gets a packet from the network receive buffer, if one is available.
// The packet will by headed by an ethernet header.
// maxlen The maximum acceptable length of a retrieved packet.
// packet Pointer where packet data should be stored.
// Returns: Packet length in bytes if a packet was retrieved, zero otherwise.
uint16_t enc28j60PacketReceive(uint16_t maxlen, uint8_t *packet)
{
uint16_t rxstat;
uint16_t len;
// check if a packet has been received and buffered
//if( !(enc28j60Read(EIR) & EIR_PKTIF) ){
// The above does not work. See Rev. B4 Silicon Errata point 6.
if( enc28j60Read(EPKTCNT) == 0 )
{
return(0);
}
// Set the read pointer to the start of the received packet
enc28j60WriteWord(ERDPTL, gNextPacketPtr);
//enc28j60Write(ERDPTL, (gNextPacketPtr &0xFF));
//enc28j60Write(ERDPTH, (gNextPacketPtr)>>8);
// read the next packet pointer
gNextPacketPtr = enc28j60ReadBufferWord();
//gNextPacketPtr = enc28j60ReadOp(ENC28J60_READ_BUF_MEM, 0);
//gNextPacketPtr |= enc28j60ReadOp(ENC28J60_READ_BUF_MEM, 0)<<8;
// read the packet length (see datasheet page 43)
len = enc28j60ReadBufferWord() - 4;
//len = enc28j60ReadOp(ENC28J60_READ_BUF_MEM, 0);
//len |= enc28j60ReadOp(ENC28J60_READ_BUF_MEM, 0)<<8;
//len-=4; //remove the CRC count
// read the receive status (see datasheet page 43)
rxstat = enc28j60ReadBufferWord();
//rxstat = enc28j60ReadOp(ENC28J60_READ_BUF_MEM, 0);
//rxstat |= ((uint16_t)enc28j60ReadOp(ENC28J60_READ_BUF_MEM, 0))<<8;
// limit retrieve length
if (len > maxlen - 1)
{
len = maxlen - 1;
}
// check CRC and symbol errors (see datasheet page 44, table 7-3):
// The ERXFCON.CRCEN is set by default. Normally we should not
// need to check this.
if ((rxstat & 0x80) == 0)
{
// invalid
len = 0;
}
else
{
// copy the packet from the receive buffer
enc28j60ReadBuffer(len, packet);
}
// Move the RX read pointer to the start of the next received packet
// This frees the memory we just read out
enc28j60WriteWord(ERXRDPTL, gNextPacketPtr );
//enc28j60Write(ERXRDPTL, (gNextPacketPtr &0xFF));
//enc28j60Write(ERXRDPTH, (gNextPacketPtr)>>8);
// However, compensate for the errata point 13, rev B4: enver write an even address!
if ((gNextPacketPtr - 1 < RXSTART_INIT)
|| (gNextPacketPtr - 1 > RXSTOP_INIT))
{
enc28j60WriteWord(ERXRDPTL, RXSTOP_INIT);
//enc28j60Write(ERXRDPTL, (RXSTOP_INIT)&0xFF);
//enc28j60Write(ERXRDPTH, (RXSTOP_INIT)>>8);
}
else
{
enc28j60WriteWord(ERXRDPTL, (gNextPacketPtr - 1));
//enc28j60Write(ERXRDPTL, (gNextPacketPtr-1)&0xFF);
//enc28j60Write(ERXRDPTH, (gNextPacketPtr-1)>>8);
}
// decrement the packet counter indicate we are done with this packet
enc28j60WriteOp(ENC28J60_BIT_FIELD_SET, ECON2, ECON2_PKTDEC);
return(len);
}
/****************************************************************************
* 名 称:void tapdev_init(void)
* 功 能:配置网卡硬件,设置IP地址
* 入口参数:
* 出口参数:
* 说 明:
* 调用方法:
****************************************************************************/
void tapdev_init(void)
{
etherdev_init();
}
/****************************************************************************
* 名 称:uint16_t tapdev_read(void)
* 功 能:读取一包数据
* 入口参数:
* 出口参数: 如果一个数据包收到返回数据包长度,以字节为单位,否则为零。
* 说 明:
* 调用方法:
****************************************************************************/
uint16_t tapdev_read(void)
{
return enc28j60PacketReceive(1500, uip_buf);
}
/****************************************************************************
* 名 称:void tapdev_send(void)
* 功 能:发送一包数据
* 入口参数:
* 出口参数:
* 说 明:
* 调用方法:
****************************************************************************/
void tapdev_send(void)
{
enc28j60PacketSend(uip_len, uip_buf);
}
/******************* (C) COPYRIGHT Pang 2018 *****END OF FILE****/