本文的主要参考为官方文档OpenCV249-fitEllipse和博客-opencv中的椭圆拟合
以及《Learning OpenCV 3》page424-425
OpenCV中提供的椭圆拟合API如下:
RotatedRect fitEllipse(InputArray points)处理:该函数使用的是最小二乘的方法进行拟合的。参考论文:《Direct least square fitting of ellipses》
输出:RotatedRect 类型的矩形,是拟合出椭圆的最小外接矩形。
绘制椭圆用到的API如下,官方文档OpenCV249-ellipse
void ellipse(Mat& img, Point center, Size axes, double angle, double startAngle, double endAngle, const Scalar& color, int thickness=1, int lineType=8, int shift=0)
void ellipse(Mat& img, const RotatedRect& box, const Scalar& color, int thickness=1, int lineType=8)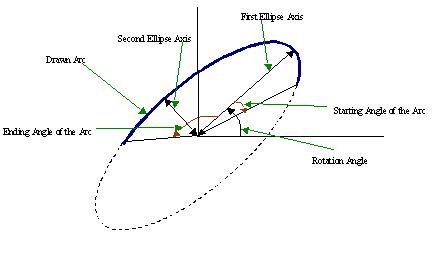
示例代码如下:
#include "opencv2/imgproc/imgproc.hpp"
#include "opencv2/highgui/highgui.hpp"
#include <iostream>
using namespace cv;
using namespace std;
int main( )
{
const char* filename = "rect-45度.bmp";
Mat src_image = imread(filename, 0);
if( src_image.empty() )
{
cout << "Couldn't open image!" << filename;
return 0;
}
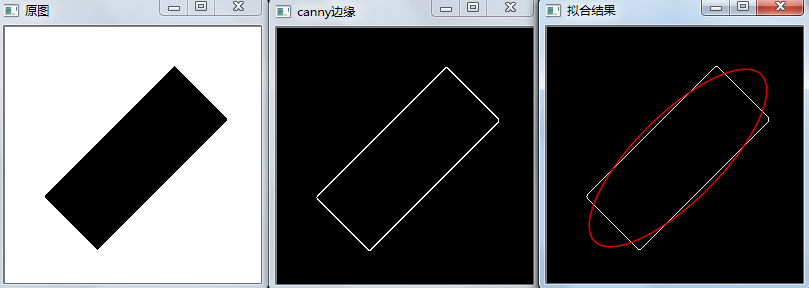
imshow("原图", src_image);
//轮廓
vector<vector<Point>> contours;
//使用canny检测出边缘
Mat edge_image;
Canny(src_image,edge_image,30,70);
imshow("canny边缘",edge_image);
//边缘追踪,没有存储边缘的组织结构
findContours(edge_image, contours, CV_RETR_EXTERNAL, CV_CHAIN_APPROX_NONE);
Mat cimage = Mat::zeros(edge_image.size(), CV_8UC3);
for(size_t i = 0; i < contours.size(); i++)
{
//拟合的点至少为6
size_t count = contours[i].size();
if( count < 6 )
continue;
//椭圆拟合
RotatedRect box = fitEllipse(contours[i]);
//如果长宽比大于30,则排除,不做拟合
if( MAX(box.size.width, box.size.height) > MIN(box.size.width, box.size.height)*30 )
continue;
//画出追踪出的轮廓
drawContours(cimage, contours, (int)i, Scalar::all(255), 1, 8);
//画出拟合的椭圆
ellipse(cimage, box, Scalar(0,0,255), 1, CV_AA);
}
imshow("拟合结果", cimage);
waitKey();
return 0;
}
