

1.1针孔照相机
1.1.1透视投影
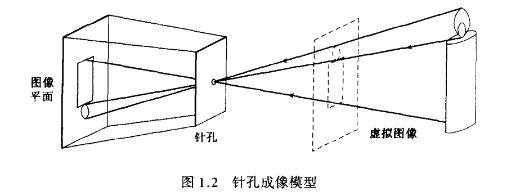
透视投影产生的是一副颠倒的图像(除此之外完全等价),这幅图像落在一个处于针孔前面的平面上,他到针孔的距离等于实际成像面到针孔的距离。
纯几何方式证明:(三点共线,线段长度成比例)


1.1.2 仿射投影
两种特定的仿射模型——弱透视和正交投影

图像尺寸与物体距离之间的依赖关系
图像上的距离=放大率*实际平面距离
放大率 = 实际平面到针孔的距离 / 图像到针孔的距离(保证为一个正值)
弱透视模型(按比例的正交):
放大率为常数。为-1就是正交投影(所有光线与图像面正交),假设这种情况是不现实的。
1.2 带镜头的摄像机
镜头的作用:从较大面积中收集光线、保持图像锐化聚焦
镜头服从几何光学定律(忽略衍射、交叉反射和其他物理光学现象):
跟踪光线传播路径
1.2.1 近轴几何光学
近轴(一阶):所有进入镜头的光线之间与镜头折射表面法线之间的夹角相对较小


一阶近似 x~sinx~tanx(在该场景中,近似的是夹角x)
得到近轴折射方程式
1.2.2 薄透镜
薄透镜方程


1.2.3 实际透镜(厚透镜)
表述厚透镜性能的方程式与薄透镜的差别:
薄透镜的主点o,在厚透镜中变为两个点H以及H‘
计算偏移,角度变大


球形像差:使物体每一点的图像变模糊而造成图像变差
畸变:改变图像形状
色差:由波长导致的相关变化:透明介质的折射系数、焦距 形成纵向色差与横向色差。
解决办法: 复合镜头(透镜组合)……不足:渐晕效应影响自动图像分析程序
1.3 人的眼睛
1.4 信号感应
传感器统计模型 量化噪声的讨论
重要推导式:

习题:

