当前方法的问题
基于FCN的方法在精细结构或边界上仍有缺陷。
精确显著物体检测的挑战:1)显著性主要定义在整个图像的全局对比度上,而不是局部或像素特征上。为了获得准确的检测结果,发展的显著性检测方法必须了解整个图像的全局意义和物体的详细结构。为了解决这个问题,需要聚合多层深度特征的网络。2)大多数显著目标检测方法都是用交叉熵作为训练损失,但是,经过CELoss训练的模型通常对边界像素的区分置信度较低,导致边界模糊。其他损失函数,如IoU Loss,F-measure Loss 和 Dice-score Loss 是针对有偏的训练集提出的,但他们不是专门为了获得精细的结构而设计的。
怎么解决这个问题
1)BASNet,同时捕获全局和局部的上下文信息。
2)新的损失(BCE+SSIM+IoU),获得高置信度显著图和清晰边界。
网络结构
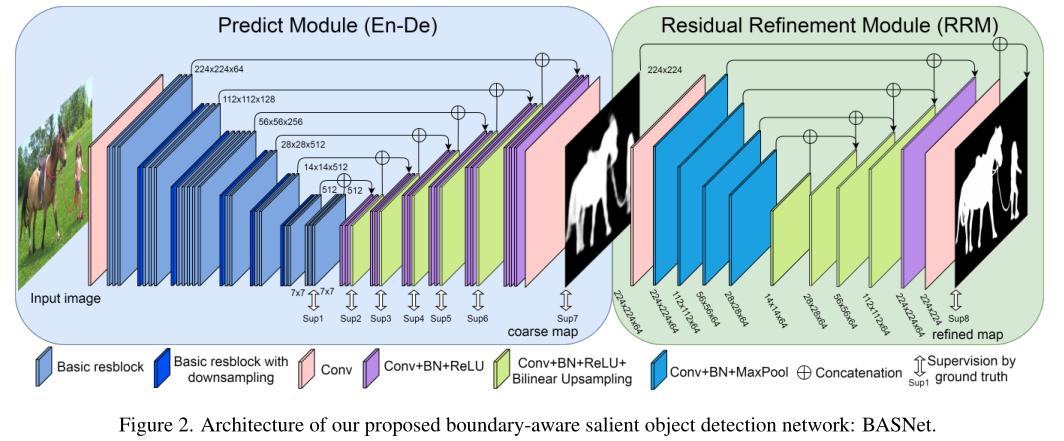
预测模块:设计成编解码网络,因为这种结构能同时捕获高层次的全局上下文和低层次的细节。编码器有一个输入卷积层和由基本res块组织称的六部分。为了更进一步捕捉全局信息,在编码器和解码器之间加了一个桥接块,包含三个卷积层。解码器与编码器基本对称,每个阶段的输入是解码器的前一阶段的上采样和编码器相应阶段输出的级联。取最后一层精度最高的图作为预测模块的输出。
优化模块:通过残差块优化粗糙的显著图。粗糙包括:1)模糊有噪声的边界;2)不均匀预测的区域概率。实际的粗糙预测图两种都包含。残差优化模块最初被提出用来用于边界优化,然而,由于设计的模块很浅,难以捕获高级信息进行优化。RRM采用残差编解码器架构,包含输入层,编码器,桥接层,解码器和输出层,编码器和解码器包含4个阶段,每个阶段只有一个卷积层。
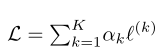
损失函数
总的损失等于每个输出图的损失的加权和。共有8个输出,7个来自预测模块,1个来自优化模块。
每层的损失包括三个部分:BCE loss、SSIM loss 和 IoU loss。

BCE loss的定义:

SSIM loss 最初被用于图像质量评估,捕捉图像中的结构信息,定义如下:

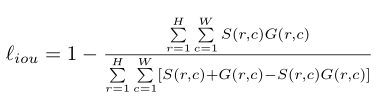
IoU 最初是用来度量两个j和的相似性的,然后被用作目标检测和分割的标准评价评估度量,这里采用的IoU loss 定义如下:
实验结果
与其他方法的结果对比。
