文章目录
1.本章内容概要
强化学习与其它学习相比,一个重要的特点是,强化学习利用训练信息(即根据环境信息设计的reward函数)评估我们采取的动作,而不是指导我们采取什么动作,这是RL需要探索的原因。评估性反馈(evaluative feedback, 也就是reward)表明我们当下采取的动作有多好,用来训练指示性反馈;指示性反馈(instructive feedback, 也就是value)指导算法采取哪个动作,不需要真的采取那个动作我们就能得到(通过value lookup table或者value approximator,对应表格型算法和拟合型算法,表格或者拟合器是根据交互的经验学习出来的[例如上一章Tic-Tac-Toe的状态值表],后面章节详细介绍)。
这一章主要介绍单状态问题值函数的评估(利用evaluative feedback),单状态问题是nonassociative的(策略不是状态的函数,因为只有一个状态)。注意上一章介绍的Tic-Tac-Toe问题是associative的,因为策略是状态(盘面)的函数。讨论这个简单情形可以避免完整的RL问题的复杂性,可以帮助我们更好地理解evaluative feedback与instructive feedback的区别和联系。
本章以多臂赌博机(老虎机)为例,介绍上述内容。
2.k-臂赌博机问题
赌博机问题可以描述为:假设有一台赌博机,上面有 k 个拉杆,每次拉下一个拉杆,就会获得一定的奖励。不同拉杆对应的奖励大小不一样(每个杆给出的奖励服从一个分布)。但是你提前并不知道哪个对应的奖励大。那么如果我们有N次拉杆机会,我们如何找到一个最优策略,使得获得的累计奖励最大?[1]
一个最直观的办法是:我们评估拉动每一个杆获得回报的期望值,当评估得比较准确后,选择期望最大的那个拉杆就好了。在时间t步,我们选择的动作(拉哪个杆,共k个可能)为 ,相应的回报是 。对于某个动作a,我们定义它的值为(这个函数叫做动作值函数,衡量动作的好坏,这也就是instructive feedback,而 是evaluative feedback):
我们只能利用有限的经验信息评估 ,记时间t步的值估计为 。我们只能根据 来选择动作,如果我们每次都选择 ,则我们的策略是贪婪(greedy)的(利用,exploiting),但是如果我们开始就这么做,因为我们的估计太不准确了,导致 并不真的是最好的动作,因此我们不得不选择一些非最大 的动作,从而得到关于各种动作的信息用来更好地评估 (探索,exploring)。一般采用ε-greedy方法权衡exploiting和exploring,注意其实关于exploiting和exploring有很多更深入的研究,但是这些研究大多具有strong assumptions,因此不一定适用。
3.动作值方法
我们把先估计行为的值,然后基于行为值选择动作的方法称为行为值方法(action-value methods)。一个合理的估计是取经验中 的奖励的均值:
注意,如果分母是0,则我们直接令 即可。这个式子很直观,不需要详细解释。
得到了估计的行为值,我们以什么样的原则选择动作呢?上一个小节已经提到了,即取值最大的那个动作就行了(注意最大值如果出现在多个动作上,则从中随机选择):
为了保证探索性,采用ε-greedy策略:每次选择动作,以一个小概率 随机选择一个动作,而不是总按照最大原则。ε-greedy可以保证所有的 收敛到 。选择最优动作的概率可以随着时间推进而逐渐提高,或者说ε逐渐降低。
4.10臂赌博机实验
这个小节的目的是展示探索的作用。
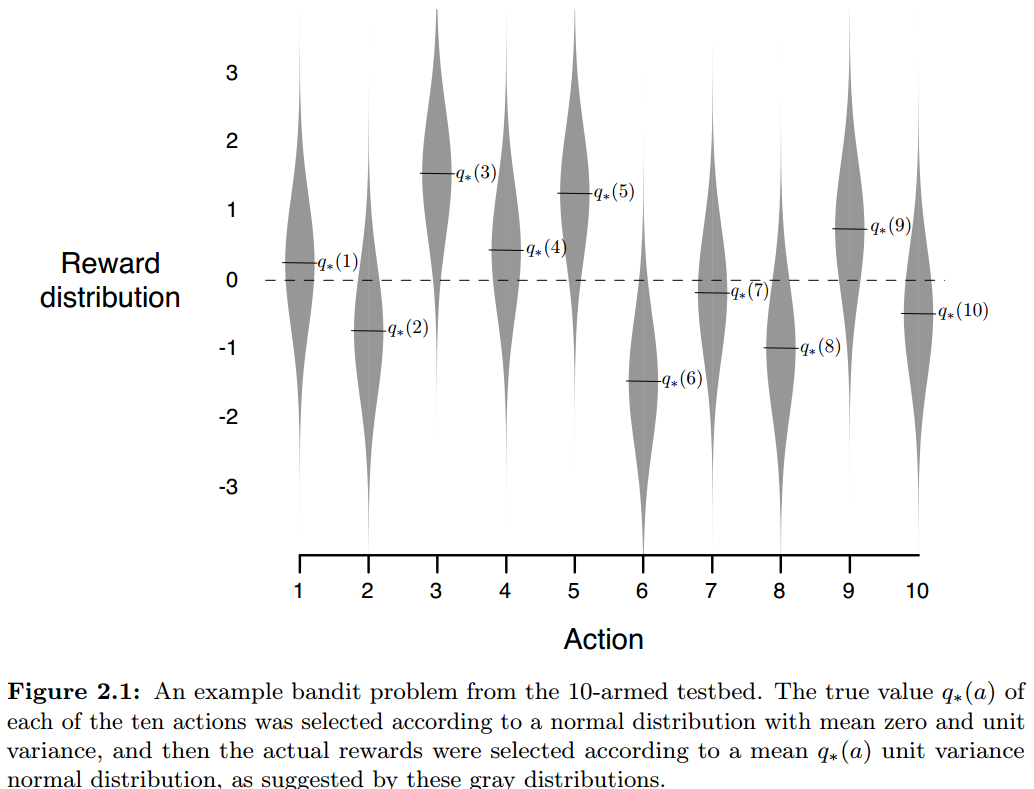
10臂赌博机问题,共有10个动作,每个动作a都对应一个确定的奖励分布,每次该动作的奖励是从其对应分布上的采样。这里首先从一个正态分布 上采样得到10个值,作为10个动作奖励分布的均值,也就是10个 ,设置每个动作服从正态分布 。
为了充分衡量算法的效果,我们按照上面介绍的步骤,生成2000个10臂赌博机问题,每个仿真1000个step,用这2000个问题上的平均值考量算法效果。下面给出选择不同ε时的收敛曲线( 表示不探索)。
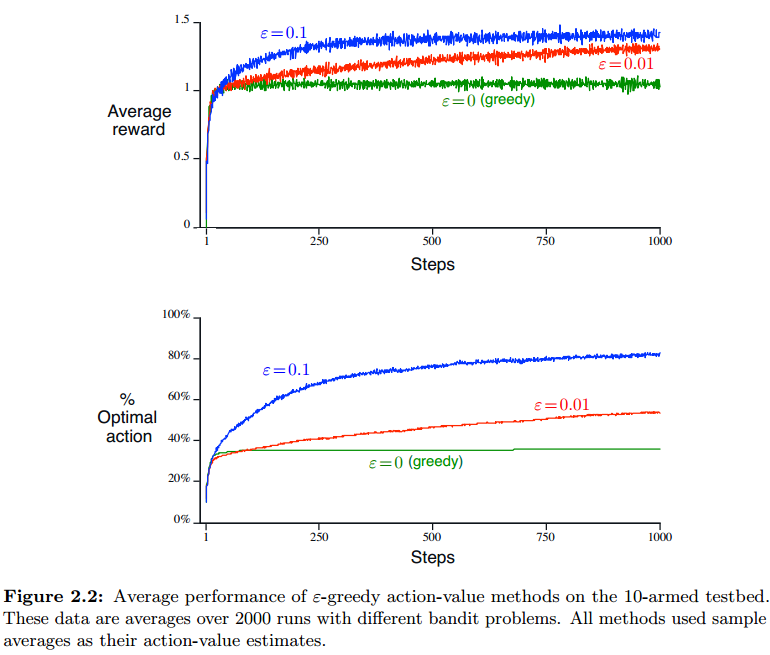
可以看出,ε小一些,会导致收敛变慢,但是会最终收敛到更好的解上去;实际上可以让ε从大到小变化。但是如果ε=0,则很难收敛到好的解。注意,这个问题是可以通过分析找到最大average reward的,大概在1.55左右:
如果问题reward的方差放大,则探索率应该适当高一些;如果问题是非平稳的(nonstationary,也就是在1000个step中,每个step上10个动作奖励的概率分布都会缓慢变化),则探索也是非常必要的,生活中绝大部分问题都是nonstationary的。程序可以参考Github仓库。
5.增量实现
前面介绍的方法存在一个大问题,就是在计算 时,我们需要利用所有的历史数据。这导致我们不得不存储所有的历史数据来估计 ,使得存储量和计算量随着估计推进快速增加,这需要想办法克服,可以设计一个增量式的更新方法(此处公式先截图了…)。
我们考虑某动作a,用 表示第i次选择该动作时的奖励值, 表示对 的第n次估计:

这样,我们只需要记录 就行了,计算量也非常小(想想递推最小二乘、kalman滤波,有木有觉得这个式子非常像)。式子中, 叫估计误差(error in the estimate),通过向目标走一小步来降低; 是更新步长(step-size)。
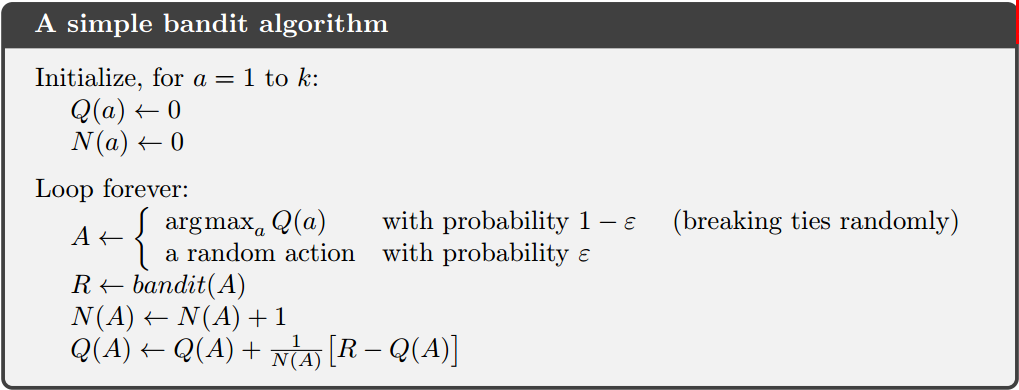
伪代码:
6.非平稳情况的处理
对于非平稳情况(每个动作奖励的概率分布是变化的),需要给最近的样本更大的权重,较好的方法是使用固定的步长(constant step-size),也就是把上小节的 换成固定的步长α<1,原因是:
可以看到,固定步长相当于越最近的样本占的权重越大;而且所有系数之和恰好为1,我们把这叫做指数加权平均。下面我们分析下收敛条件。
首先考虑更一般的情况,我们用 表示更新步长,这是一个随着n变化的序列,则只有序列 满足如下条件时,增量更新公式才是收敛的:
第一个条件保证能克服初值的误差和各种随机扰动;第二个条件保证了最终的收敛。如果取1/n,则所得结果为算术平均(样本均值sample-average),这是能保证收敛的;但是constant step-size是不能保证收敛的,而是不断改变以适应最近得到的回报,但是对于nonstationary问题是必要的。注意大多数强化学习都是nonstationary的。因此,满足收敛条件的step-size序列往往用于理论分析而不是实际应用。
延伸一下,kalman滤波中,由于模型失真而产生的滤波器发散问题,可以通过加大最近数据的权重改善,叫做衰减记忆kalman滤波,本节的内容与之非常相似;还应该注意,上一章介绍的Tic-Tac-Toe并不是nonstationary的,它只是发生了状态的切换,是类似于associative的(切换与动作选择相关,因此不是完全associative的)。
7.保证探索 - 乐观初值方法
我们再观察下constant step-size更新公式:
可见,估计是受到初值 影响的,而 只能由我们的经验设定,因此实际上估计是有偏的(但是渐进无偏)。合理选择初值,有助于算法找到更好的解。对于采样均值(sample-average)方法,这种偏差会随着每个动作被选择次数的增加而消失。对于常数步长方法来说,这种偏差则消失得慢很多。但是,这种需要提前设定的初值有时候是有利的,我们可以通过初始值来引入一些先验知识。
这里介绍的做法很简单,叫做optimistic initial values,也就是设置 时,选个大一些的数,保证收敛到真值的过程实际上是个下降收敛的过程。这理解起来很直观,如果最初所有动作的值都一致,则我们会随机选一个动作执行并更新,更新后该动作的值下降;然后下次选择时,根据最大值原则,这个动作就不会被选中了,则剩余动作被随机选择一个,依此类推…这样,就相当于把利用和探索融合了起来。

注意到,optimistic initial values方法最开始收敛速度较慢,但是最终会比ε-greedy取得更好的效果。但是必须注意,这种方法只对平稳过程有效,对于nonstationary问题是基本无效的,因为即使收敛到暂时的真实值,一旦真实值上浮,则探索效果就消失了。
那个尖峰可能是因为最优动作由于真实值比较大,导致开始的误差小一些,因此修正比较小,这样进行一些更新后,这个最优动作就会比其它动作的值稍微大一些,导致经常被选中,从而出现尖峰;而当最优动作的误差值降低到与其它动作类似的时候,就不再有优势了。
8.保证探索 - 基于上置信界的动作选择
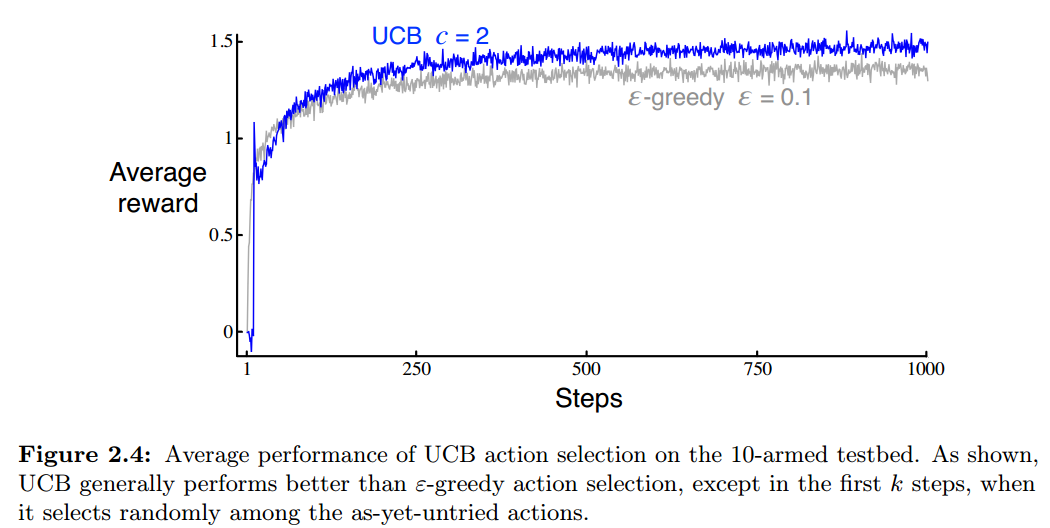
与ε-greedy和optimistic initial values类似,这是另一种平衡探索和利用的方式。但是UCB方法在探索时,综合考虑了估值的准确程度以及动作本身的好坏(值的大小),理论上比ε-greedy效果更好。
UCB选择动作的公式为:
平方根项表示动作的值的估计方差, 表示动作a被选择过的次数,c用来控制对探索与利用的权重,综合起来表示对于行为 a 值估计的不确定性度量;而第一项 表示对动作好坏的度量。如果 ,则认为这个动作的UCB是最大的,如果多个动作的UCB一样都是最大的,则从中随机选择一个。
在时间t,某个动作的UCB与其Q值正相关,与其曾被选择的次数负相关,实际选择的动作是权衡这两者的;随着时间增长,由于UCB不确定度项中对时间取了对数,导致分子增长越来越慢,而分母的增长速度还是基本不变的,这导致不确定度项的数值逐渐下降,表示我们对值的估计越来越准确了。
根据试验结果,可以看到UCB是比ε-greedy好的。但是UCB不适用非平稳问题,实现也更复杂一些,还会因状态空间的扩大导致难以处理,因此实际场景中很难应用。
9.梯度赌博机算法
上面介绍的方法都是基于值函数的,这里我们考虑基于动作优势的方法,这种方法是RL中策略梯度(DPG、Actor-Critic等)方法的基础。我们用 表示动作a的偏好值。
一个直观的方法是比较所有动作a偏好的相对大小,我们可以用softmax函数(也叫Gibbs或Boltzmann分布)归一化(用 表示某个策略,实际上是选择动作的概率):

偏好函数的更新公式为:

是 t 时刻之前所有回报的均值,它是比较reward的baseline,baseline是必须的,否则性能会大幅下降,尤其是在reward分布本身就不是0均值的时候。第一个式子是对被选中动作的更新,第二个式子是对未被选中动作的更新。
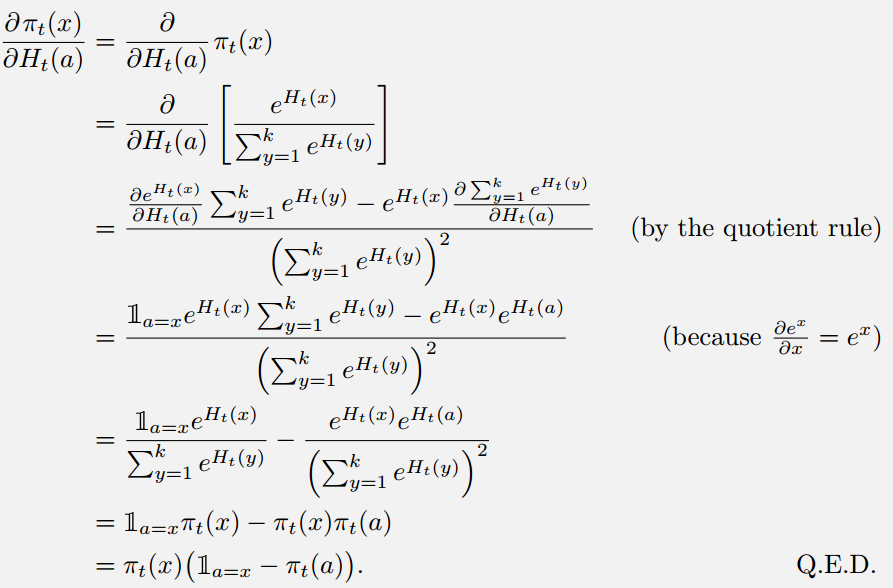
proof
根据梯度上升方法,我们考虑更新公式为(基础的梯度下降法,不解释了):
下面证明,偏好函数的更新公式取期望时与梯度上升法是等价的。
将 带入梯度上升公式,有:
其中 是不依赖x的baseline项,能添加这项是因为:
从而有( 替换为 是很自然的,而由于 ,因此 也可以替换):
由于:
于是:
改成增量形式:
需要强调的是,随机梯度上升对baseline是没有要求的,因此 无论如何选择都满足梯度上升过程,baseline的选择不影响更新值的期望,但是会影响更新值的方差。
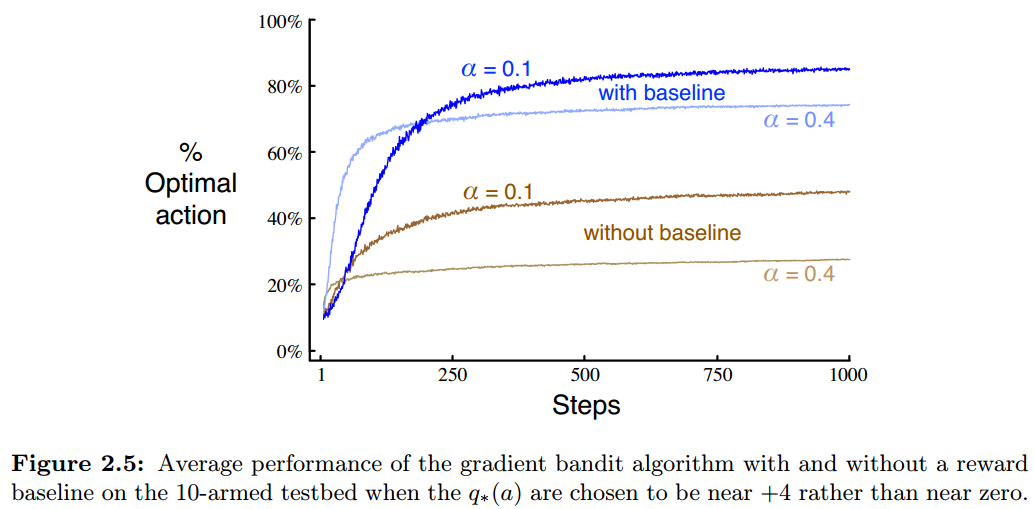
可见效果不错,也能看到baseline的巨大作用。baseline可以理解为,选择这个动作回报比过去的平均回报大,证明这个动作不错,增加偏好,相应地其它动作就降低偏好;反而反之。
10.多状态赌博机
上面讨论的都是nonassociative的,也就是赌博机每个摇臂对应的奖励分布在1000个steps中是不变的。如果这个分布是变化的(较剧烈,区别于nonstationary),则问题就是associative的。我们可以认为最开始赌博机各个摇臂对应的分布构成一个状态s,然后下一个step变成了状态s’(分布变化了),这里的状态转移与采取的动作 没有关系,因此是介于k-armed bandit和完全RL的问题(完全RL状态转移与采取的动作相关)。
举个例子:我们初始化100组摇臂的分布(每组包含10个摇臂的均值和方差),每个step我们随机选择其中的一组参数,根据这组参数采样出回报。这就构成了associative问题。
这nonstationary不同,nonstationary本质上只有一个状态s,但是这个状态随着时间缓慢连续变化;而associative具有多个状态,不同的step是在这多个状态之间切换,因此后者比前者变化剧烈很多,本章讨论的适用于nonstationary的方法无法用到associative上。
解决associative问题,一般我们需要一些clue,通过clue区别不同的状态,如果没有能区别状态的信号,那问题是无法解决的。
11.总结
本章的开始我们以多臂赌博机问题为例,介绍了最基本的行为值方法。为了平衡探索和利用问题,引入了ε-greedy策略和UCB策略。UCB在探索的时候能够考虑到每个行为的确定性,不确定性越大被访问的概率就越高。另外一个简单的trick就是设置一个比较理想的初始值函数,有时候它带来的探索效果可能比ε-greedy策略更好。最后我们还介绍了基于偏好选择行为的随机梯度上升法[2]。
各方法中都包含了超参数,例如ε-greedy中的ε、UCB中的c、梯度方法中的 、最优初值方法中的初值 。我们对这些参数选取多种值,各自进行多次试验,得到learning curve:
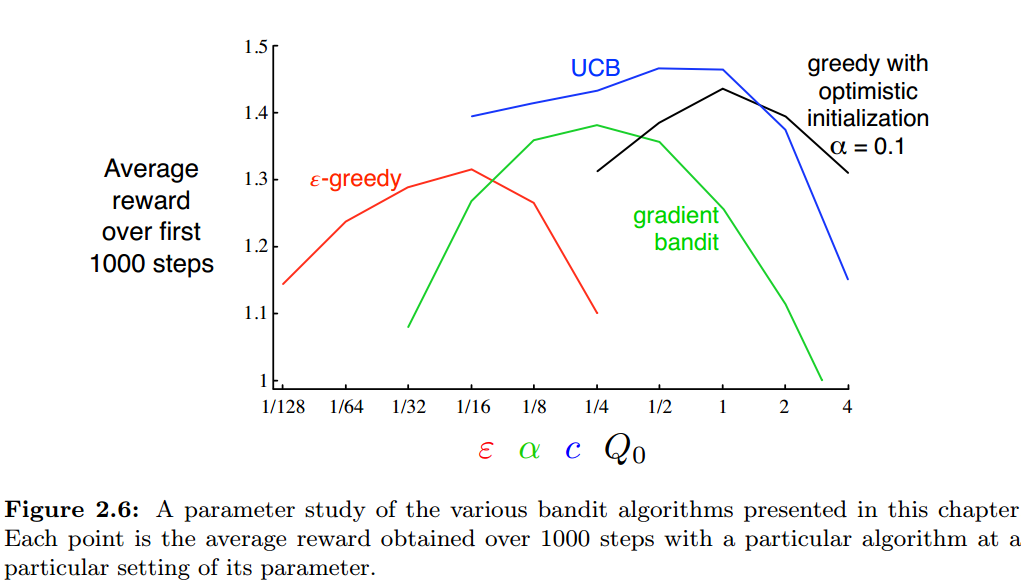
所有算法都是在参数居中时效果最好,而且在最好点附近,它们都对参数不是特别敏感(至少1个数量级),UCB看起来表现是最好的。作者说,由于本文的方法都很简洁,且可以适用于各种RL任务,因此可以认为是state-of-the-art的,而那些复杂且精致的方法往往因为前提条件太难满足,无法得到实际应用。
对于k-armed bandit问题,用Gittins index(基于贝叶斯方法,根据先验选择最好动作,然后计算后验作为下一个step的先验,常采用posterior sampling or Thompson sampling处理分布)计算值函数是最好的探索和利用的权衡,但是要求分布已知且计算量较大,因此很难扩展。它和本章中distribution-free方法中最好情况是差不多的。在贝叶斯方法中,对每个动作先验分布,如果知道每个动作导致的reward分布,就可以计算后验了。但对于离散问题,树状结构指数级扩大,导致开销不能接受。但是或许这能用估计的方法逼近,把bandit方法转换为标准RL问题,感兴趣可以参考Bibliographical and Historical Remarks提到的文献。
参考文献
[1].(专栏参考)https://zhuanlan.zhihu.com/c_1060499676423471104
[2].(程序仓库)https://github.com/onetree1994/reinforcement-learning-an-introduction
