1.绪论
前面几章主要介绍了机器人的运动学,逆运动学以及机器人关节广义速度,本章开始介绍机器人的动力学模型。机器人动力学模型一般由一个二阶非线性微分方程组表示,通常十分复杂,含有强非线性、强耦合等。一般有两种建立动力学模型的方法:牛顿-欧拉方法,以及拉格朗日方法。本章这里只介绍拉格朗日方法。
2.操作臂动力学的拉格朗日公式
定义拉格朗日函数:
K:系统运动部分的总动能,P:系统的总势能
系统的动力学方程(拉格朗日-欧拉(L-E)方程):
-----第i关节的广义变量
------第i关节的广义速度
------作用于第i连杆的外部广义力(视
为转/平动分为力矩/力)
假设各连杆的动能为,势能为
,则总动能和总势能为:
因为势能仅是位置
的函数
,所以L-E方程可以简化为:
或者矢量表达形式:
举一个简单的实例:
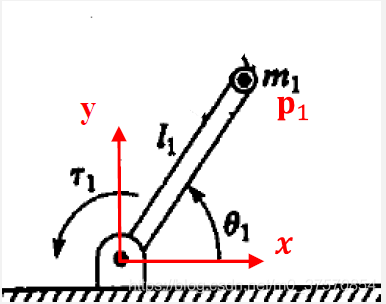
驱动单杆转动,杆质量集中在端点,平面上设立参考系。
1、计算杆质量点的位置:
2、计算质量点的速度向量:
3、计算质量点的速度:
4、计算杆1的动能
5、计算杆1 的重力势能:
6、拉格朗日函数:
7、计算:
8、计算
9、计算:
10、由拉格朗日-欧拉方程:
代入得到动力学模型:
3.动力学方程推导过程
——计算任一连杆上任一点的速度
——计算各连杆的的动能和机器人系统的总动能
——计算各连杆的势能和机器人系统的总势能,得到拉格朗日函数L
——对拉格朗日函数求导,得到动力学方程式
1)计算任一连杆上任一点的速度
连杆上任一点
在基座标系下的位置为
,该点的速度为:
速度的内积
2)计算各连杆的动能和机器人系统总动能
设连杆上任一点的质量为
,其动能为:
对连杆进行积分,得到连杆
的动能:
在这里记“伪惯量阵”为:
其中,
注意到:
等于连杆i的质量
:
分别是连杆
的质心位置坐标
以及物体的转动惯量、协转动惯量分别为:
有:
此时连杆的动能可以写为:
假设不计连杆的传动装置动能,那么系统的总动能为:
3)计算各连杆位能和机器人系统总势能,以及拉格朗日函数
设连杆上任一点的质量为
,其势能为:
对连杆进行积分,得到连杆
的位能:
其中
系统总的位能为:
系统的拉格朗日函数为:
4)对拉格朗日函数求导,得到动力学方程式。
首先将拉格朗日函数对求导:
因为:
所以有:
写出全部拉格朗日方程:
其中:
或者
其中
四、动力学模型讨论
1) 方程中,惯量矩阵是n*n阶对称正定矩阵
2)动力学模型的逆解存在,即若给定,就可以计算需要的控制量
.
3) 动力学模型的简化,模型简化的必要性
(1)动力学模型的计算过于复杂,一次逆动力学计算需几千至几万个乘和加的运算,比较费时(采用牛顿—欧拉方法可以将乘和加的运算次数降至千次以内);
(2)动力学模型中的物理参数一般不易准确获得,采用完全准确模型的难度很大。
简化的方法:
a.在低速运行时忽略向心力/哥氏力项
b.忽略惯量阵的非对角元素;
c.忽略非线性和时变性。
