多刚体动力学建立的方法通常有两种,牛顿欧拉法和拉格朗日大法,本博客以一阶倒立摆动力学建模(考虑阻力)和平面两连杆机构建模为例,对两种方法做一个归纳和总结:
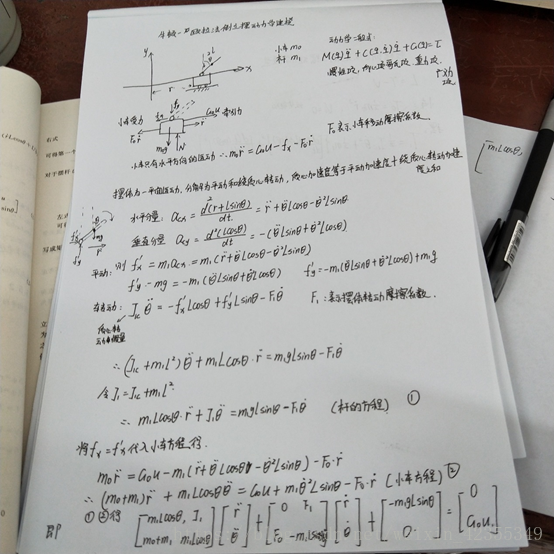
1.一阶倒立摆动力学建模过程:
2.平面两连杆机构建模
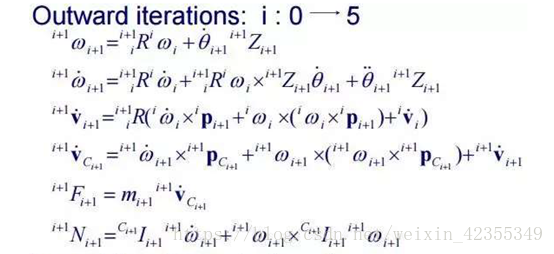
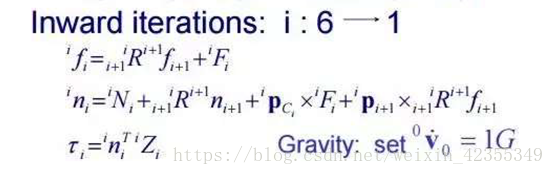
牛顿欧拉法:
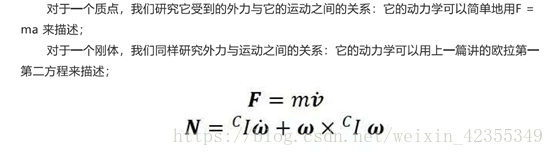
如果知道了连杆质心的位置和惯性张量,那么它的质量分布特征就完全确定了。牛顿方程以及描述旋转运动的欧拉方程描述了力,惯量和加速度之间的关系。对于转动关节,算法归纳如下:
拉格朗日法:
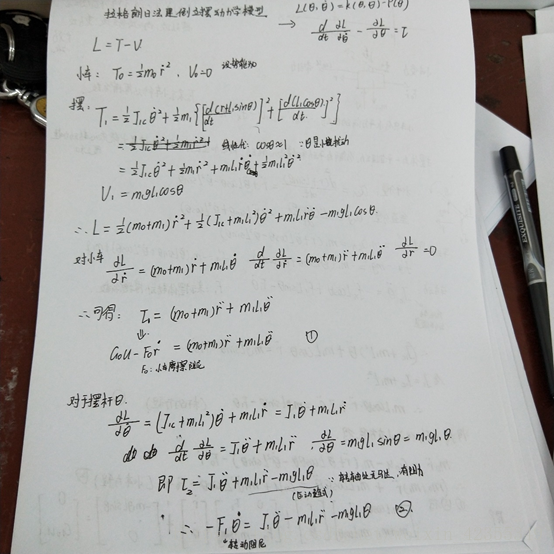
其中L为拉格朗日算子,K为动能,与位置和速度有关,P为位能
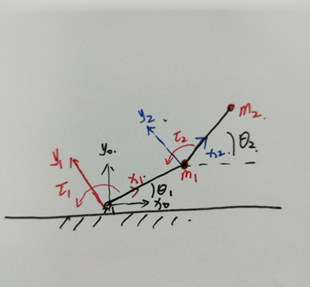
算例:
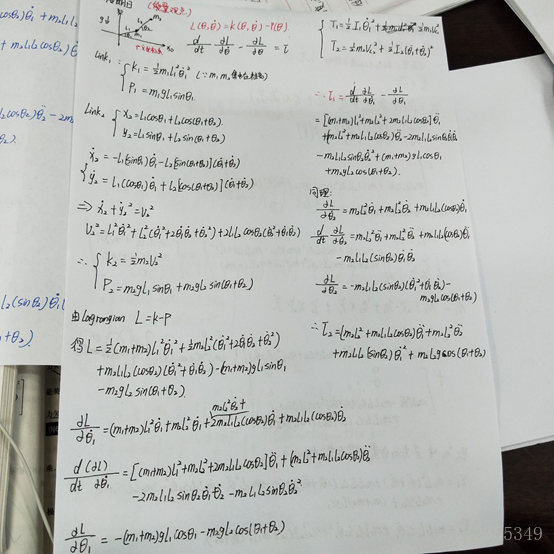
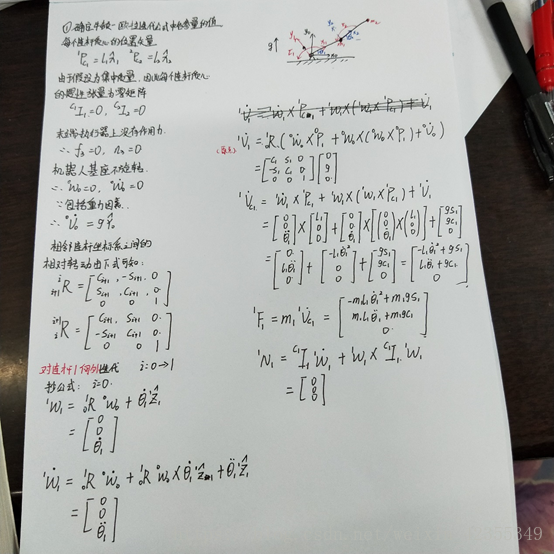
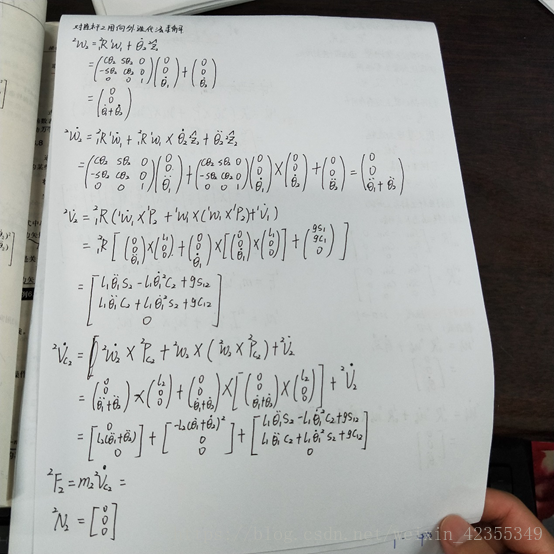
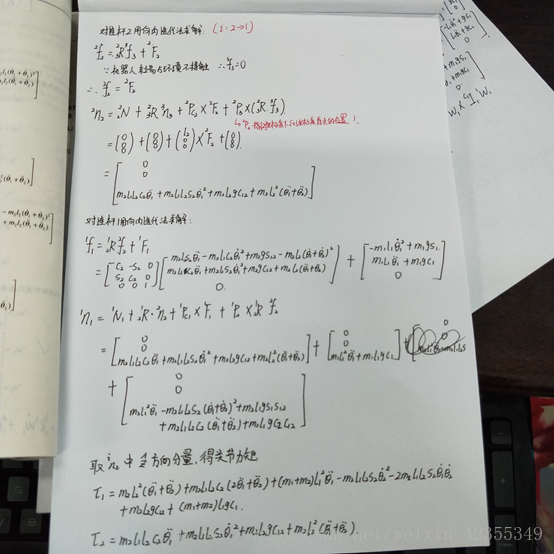
如图,分别用牛顿欧拉法和拉格朗日法计算质量集中在连杆末端的二连杆平面操作臂,设其质量分别为m1 和m2
牛顿欧拉法求解如下:
拉格朗日求解:
参考书目:机器人学导论