Pytorch|YOWO原理及代码详解(二)
本博客上接,Pytorch|YOWO原理及代码详解(一),阅前可看。
1.正式训练
if opt.evaluate:
logging('evaluating ...')
test(0)
else:
for epoch in range(opt.begin_epoch, opt.end_epoch + 1):
# Train the model for 1 epoch
train(epoch)
# Validate the model
fscore = test(epoch)
is_best = fscore > best_fscore
if is_best:
print("New best fscore is achieved: ", fscore)
print("Previous fscore was: ", best_fscore)
best_fscore = fscore
# Save the model to backup directory
state = {
'epoch': epoch,
'state_dict': model.state_dict(),
'optimizer': optimizer.state_dict(),
'fscore': fscore
}
save_checkpoint(state, is_best, backupdir, opt.dataset, clip_duration)
logging('Weights are saved to backup directory: %s' % (backupdir))
为了训练,设置opt.evaluate = False,根据论文(YOWO翻译)(可知ucf24训练5个epoch就可以了。
2. train
查看整个train函数。
def train(epoch):
global processed_batches
t0 = time.time()
cur_model = model.module
region_loss.l_x.reset()
region_loss.l_y.reset()
region_loss.l_w.reset()
region_loss.l_h.reset()
region_loss.l_conf.reset()
region_loss.l_cls.reset()
region_loss.l_total.reset()
train_loader = torch.utils.data.DataLoader(
dataset.listDataset(basepath, trainlist, dataset_use=dataset_use, shape=(init_width, init_height),
shuffle=True,
transform=transforms.Compose([
transforms.ToTensor(),
]),
train=True,
seen=cur_model.seen,
batch_size=batch_size,
clip_duration=clip_duration,
num_workers=num_workers),
batch_size=batch_size, shuffle=False, **kwargs)
lr = adjust_learning_rate(optimizer, processed_batches)
logging('training at epoch %d, lr %f' % (epoch, lr))
model.train()
for batch_idx, (data, target) in enumerate(train_loader):
adjust_learning_rate(optimizer, processed_batches)
processed_batches = processed_batches + 1
if use_cuda:
data = data.cuda()
optimizer.zero_grad()
output = model(data)
region_loss.seen = region_loss.seen + data.data.size(0)
loss = region_loss(output, target)
loss.backward()
optimizer.step()
# save result every 1000 batches
if processed_batches % 500 == 0: # From time to time, reset averagemeters to see improvements
region_loss.l_x.reset()
region_loss.l_y.reset()
region_loss.l_w.reset()
region_loss.l_h.reset()
region_loss.l_conf.reset()
region_loss.l_cls.reset()
region_loss.l_total.reset()
t1 = time.time()
logging('trained with %f samples/s' % (len(train_loader.dataset) / (t1 - t0)))
print('')
processed_batches是全局变量,存储已经处理的batch数,方便断点继续训练。t0 = time.time()记录当前的时间。region_loss初始化。
2.1 加载训练数据集
训练数据集是放在listDataset类中。listDataset是在dataset.py中,完整代码如下:
class listDataset(Dataset):
# clip duration = 8, i.e, for each time 8 frames are considered together
def __init__(self, base, root, dataset_use='ucf101-24', shape=None, shuffle=True,
transform=None, target_transform=None,
train=False, seen=0, batch_size=64,
clip_duration=16, num_workers=4):
with open(root, 'r') as file:
self.lines = file.readlines()
if shuffle:
random.shuffle(self.lines)
self.base_path = base
self.dataset_use = dataset_use
self.nSamples = len(self.lines)
self.transform = transform
self.target_transform = target_transform
self.train = train
self.shape = shape
self.seen = seen
self.batch_size = batch_size
self.clip_duration = clip_duration
self.num_workers = num_workers
def __len__(self):
return self.nSamples
def __getitem__(self, index):
assert index <= len(self), 'index range error'
imgpath = self.lines[index].rstrip()
self.shape = (224, 224)
if self.train: # For Training
jitter = 0.2
hue = 0.1
saturation = 1.5
exposure = 1.5
clip, label = load_data_detection(self.base_path, imgpath, self.train, self.clip_duration, self.shape, self.dataset_use, jitter, hue, saturation, exposure)
else: # For Testing
frame_idx, clip, label = load_data_detection(self.base_path, imgpath, False, self.clip_duration, self.shape, self.dataset_use)
clip = [img.resize(self.shape) for img in clip]
if self.transform is not None:
clip = [self.transform(img) for img in clip]
# (self.duration, -1) + self.shape = (8, -1, 224, 224)
clip = torch.cat(clip, 0).view((self.clip_duration, -1) + self.shape).permute(1, 0, 2, 3)
if self.target_transform is not None:
label = self.target_transform(label)
self.seen = self.seen + self.num_workers
if self.train:
return (clip, label)
else:
return (frame_idx, clip, label)
self.lines存储读去trainlist.txt的文本内容:

random.shuffle(self.lines)是对其进行打乱。剩下的就是一顿初始化:

2.2 学习率调整
lr = adjust_learning_rate(optimizer, processed_batches)
完整代码:
def adjust_learning_rate(optimizer, batch):
lr = learning_rate
for i in range(len(steps)):
scale = scales[i] if i < len(scales) else 1
if batch >= steps[i]:
lr = lr * scale
if batch == steps[i]:
break
else:
break
for param_group in optimizer.param_groups:
param_group['lr'] = lr / batch_size
return lr
学习率是根据steps进行不断调整的,如下:
......
lr = adjust_learning_rate(optimizer, processed_batches)
logging('training at epoch %d, lr %f' % (epoch, lr))
model.train()
for batch_idx, (data, target) in enumerate(train_loader):
adjust_learning_rate(optimizer, processed_batches)
processed_batches = processed_batches + 1
......
scales和step是ucf24.cfg中进行设置的衰减策略,如下:
2.3 获取训练数据
这段for batch_idx, (data, target) in enumerate(train_loader):中的data, target是通过listDataset在的def __getitem__(self, index):进行获取的。

其中:
jitter = 0.2
hue = 0.1
saturation = 1.5
exposure = 1.5
是yolov2中用于数据增强的数据,参考YOLOv2 参数详解,其中各项参数意义如下:
- jitter:利用数据抖动产生更多数据
- hue:色调变化范围
- saturation & exposure: 饱和度与曝光变化大小
这部分最关键的是:load_data_detection(self.base_path, imgpath, self.train, self.clip_duration, self.shape, self.dataset_use, jitter, hue, saturation, exposure)
完整代码如下:
def load_data_detection(base_path, imgpath, train, train_dur, shape, dataset_use='ucf101-24', jitter=0.2, hue=0.1, saturation=1.5, exposure=1.5):
# clip loading and data augmentation
# if dataset_use == 'ucf101-24':
# base_path = "/usr/home/sut/datasets/ucf24"
# else:
# base_path = "/usr/home/sut/Tim-Documents/jhmdb/data/jhmdb"
im_split = imgpath.split('/')
num_parts = len(im_split)
im_ind = int(im_split[num_parts-1][0:5])
labpath = os.path.join(base_path, 'labels', im_split[0], im_split[1] ,'{:05d}.txt'.format(im_ind))
img_folder = os.path.join(base_path, 'rgb-images', im_split[0], im_split[1])
if dataset_use == 'ucf101-24':
max_num = len(os.listdir(img_folder))
else:
max_num = len(os.listdir(img_folder)) - 1
clip = []
### We change downsampling rate throughout training as a ###
### temporal augmentation, which brings around 1-2 frame ###
### mAP. During test time it is set to 1. ###
d = 1
if train:
d = random.randint(1, 2)
for i in reversed(range(train_dur)):
# make it as a loop
i_temp = im_ind - i * d
while i_temp < 1:
i_temp = max_num + i_temp
while i_temp > max_num:
i_temp = i_temp - max_num
if dataset_use == 'ucf101-24':
path_tmp = os.path.join(base_path, 'rgb-images', im_split[0], im_split[1] ,'{:05d}.jpg'.format(i_temp))
else:
path_tmp = os.path.join(base_path, 'rgb-images', im_split[0], im_split[1] ,'{:05d}.png'.format(i_temp))
clip.append(Image.open(path_tmp).convert('RGB'))
if train: # Apply augmentation
clip,flip,dx,dy,sx,sy = data_augmentation(clip, shape, jitter, hue, saturation, exposure)
label = fill_truth_detection(labpath, clip[0].width, clip[0].height, flip, dx, dy, 1./sx, 1./sy)
label = torch.from_numpy(label)
else: # No augmentation
label = torch.zeros(50*5)
try:
tmp = torch.from_numpy(read_truths_args(labpath, 8.0/clip[0].width).astype('float32'))
except Exception:
tmp = torch.zeros(1,5)
tmp = tmp.view(-1)
tsz = tmp.numel()
if tsz > 50*5:
label = tmp[0:50*5]
elif tsz > 0:
label[0:tsz] = tmp
if train:
return clip, label
else:
return im_split[0] + '_' +im_split[1] + '_' + im_split[2], clip, label
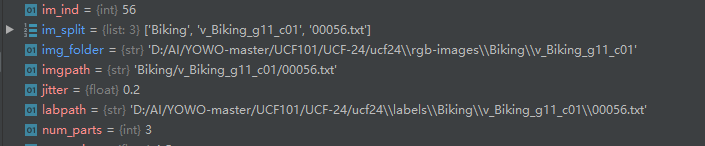
通过把路径进行分割:im_split = imgpath.split('/'),来找到标注labpath和对应的文件夹img_folder。
“在整个训练过程中,改变下采样率作为一个时间增量,得到1-2帧左右的图像。在测试期间,它被设置为1。”这个下采样率是指帧与帧之间的采样距离,如果d=2,则没隔两帧读取数据,依此类推。
d = 1
if train:
d = random.randint(1, 2)
这个train_dur对应的参数是self.clip_duration,剪辑持续时间,默认设置的是16。im_ind(在上述图片中可以看到,是56)是标注是整个视频(图像,视频被切割成一张张的图像)序列中的ID。
i_temp = im_ind - i * d
while i_temp < 1:
i_temp = max_num + i_temp
while i_temp > max_num:
i_temp = i_temp - max_num
上述代码是为了现在i_temp有效,如果溢出,则使用循环序列。
path_tmp则是获取对应帧的图像,如下:

clip.append(Image.open(path_tmp).convert('RGB'))将其转换成RGB模式,添加到序列clip中。
在训练的过程中还会使用数据增强来扩充数据集:
if train: # Apply augmentation
clip,flip,dx,dy,sx,sy = data_augmentation(clip, shape, jitter, hue, saturation, exposure)
label = fill_truth_detection(labpath, clip[0].width, clip[0].height, flip, dx, dy, 1./sx, 1./sy)
label = torch.from_numpy(label)
data_augmentation完整代码如下:
def data_augmentation(clip, shape, jitter, hue, saturation, exposure):
# Initialize Random Variables
oh = clip[0].height
ow = clip[0].width
dw =int(ow*jitter)
dh =int(oh*jitter)
pleft = random.randint(-dw, dw)
pright = random.randint(-dw, dw)
ptop = random.randint(-dh, dh)
pbot = random.randint(-dh, dh)
swidth = ow - pleft - pright
sheight = oh - ptop - pbot
sx = float(swidth) / ow
sy = float(sheight) / oh
dx = (float(pleft)/ow)/sx
dy = (float(ptop) /oh)/sy
flip = random.randint(1,10000)%2
dhue = random.uniform(-hue, hue)
dsat = rand_scale(saturation)
dexp = rand_scale(exposure)
# Augment
cropped = [img.crop((pleft, ptop, pleft + swidth - 1, ptop + sheight - 1)) for img in clip]
sized = [img.resize(shape) for img in cropped]
if flip:
sized = [img.transpose(Image.FLIP_LEFT_RIGHT) for img in sized]
clip = [random_distort_image(img, dhue, dsat, dexp) for img in sized]
return clip, flip, dx, dy, sx, sy
关于数据增强,这里有几个参数是yolov2中的,上述已经讲过,即是对图像进行抖动,改变色调、饱和度以及曝光度,并进行尺度归一化,缩放为
。
pleft和ptop是靠左(向右),靠上(向下)的偏移量,swidth和sheight是数据抖动后的宽和高,通过这些参数进行裁剪,cropped = [img.crop((pleft, ptop, pleft + swidth - 1, ptop + sheight - 1)) for img in clip]。
并进一步尺度归一化:sized = [img.resize(shape) for img in cropped]。
如果标志位flip为true,则还会进行水平翻转:sized = [img.transpose(Image.FLIP_LEFT_RIGHT) for img in sized]。
由于图像以及增强了,那么对应的标注label也需要进行对应的改变:label = fill_truth_detection(labpath, clip[0].width, clip[0].height, flip, dx, dy, 1./sx, 1./sy)。由于图像增强,主要是图像的偏移以及方式,所以对应标签的变化需要知道图像是否水平翻转,以及图像的偏移量和放缩量,即flip, dx, dy, 1./sx, 1./sy。查看完整代码:
def fill_truth_detection(labpath, w, h, flip, dx, dy, sx, sy):
max_boxes = 50
label = np.zeros((max_boxes,5))
if os.path.getsize(labpath):
bs = np.loadtxt(labpath)
if bs is None:
return label
bs = np.reshape(bs, (-1, 5))
for i in range(bs.shape[0]):
cx = (bs[i][1] + bs[i][3]) / (2 * 320)
cy = (bs[i][2] + bs[i][4]) / (2 * 240)
imgw = (bs[i][3] - bs[i][1]) / 320
imgh = (bs[i][4] - bs[i][2]) / 240
bs[i][0] = bs[i][0] - 1
bs[i][1] = cx
bs[i][2] = cy
bs[i][3] = imgw
bs[i][4] = imgh
cc = 0
for i in range(bs.shape[0]):
x1 = bs[i][1] - bs[i][3]/2
y1 = bs[i][2] - bs[i][4]/2
x2 = bs[i][1] + bs[i][3]/2
y2 = bs[i][2] + bs[i][4]/2
x1 = min(0.999, max(0, x1 * sx - dx))
y1 = min(0.999, max(0, y1 * sy - dy))
x2 = min(0.999, max(0, x2 * sx - dx))
y2 = min(0.999, max(0, y2 * sy - dy))
bs[i][1] = (x1 + x2)/2
bs[i][2] = (y1 + y2)/2
bs[i][3] = (x2 - x1)
bs[i][4] = (y2 - y1)
if flip:
bs[i][1] = 0.999 - bs[i][1]
if bs[i][3] < 0.001 or bs[i][4] < 0.001:
continue
label[cc] = bs[i]
cc += 1
if cc >= 50:
break
label = np.reshape(label, (-1))
return label
根据代码,可以推断label中的标注是 的格式。
cx = (bs[i][1] + bs[i][3]) / (2 * 320)
cy = (bs[i][2] + bs[i][4]) / (2 * 240)
imgw = (bs[i][3] - bs[i][1]) / 320
imgh = (bs[i][4] - bs[i][2]) / 240
所以,cx和cy是标注中心在图像中的相对位置(0–1之间),imgw和imgh是标注在图像中的相对宽和高(0–1之间)。 bs[i][0]标识对应的类别, bs[i][0] - 1是因为类别从0开始。因为标注增强,是需要图像的偏移量和放缩量,且都是在0-1之间。
x1,y1,x2和y2则是归一化之后的的
。诸如min(0.999, max(0, x1 * sx - dx))之类的,则是保证坐标是在图像范围内,没有溢出。接下来的bs[i][1]…bs[i][4]则是加上偏移量和放缩量之后的标注信息:
。如果有水平翻转标志flip,进行翻转。如果宽或者高太小if bs[i][3] < 0.001 or bs[i][4] < 0.001,则跳过。接着,把符合要求的标注放进label 中。在数据增强之后,返回clip和label:
if train:
return clip, label
clip是连续帧的图像(224),label是对应的(归一化之后的)目标标签。label的长度为250,是因为默认任务有50个目标(target),每个目标(target)对应五个值,
,如果没有目标,则默认为0。


在这之后,返回到listDataset类的__getitem__函数中:if self.transform is not None:判断是否需要使用transform进行图像变化,关于transform的使用,可以查看博文:图像预处理——transforms。接下来:clip = torch.cat(clip, 0).view((self.clip_duration, -1) + self.shape).permute(1, 0, 2, 3)则是把连续采样的16帧图像进行拼接,并调整其shape,按照格式:
,即通道、深度、高和宽,这是为了和torch.nn.Conv3D对应起来,可以看一下clip的shape:

是满足预期的,通道3,深度16,高224和宽224。接下来通过下述代码,返回数据。
if self.train:
return (clip, label)
2.4 loss计算与反向传播
在获取到训练数据和标注之后,则是进行loss计算和反向传播优化:
for batch_idx, (data, target) in enumerate(train_loader):
adjust_learning_rate(optimizer, processed_batches)
processed_batches = processed_batches + 1
if use_cuda:
data = data.cuda()
optimizer.zero_grad()
output = model(data)
region_loss.seen = region_loss.seen + data.data.size(0)
loss = region_loss(output, target)
loss.backward()
optimizer.step()
# save result every 1000 batches
if processed_batches % 500 == 0: # From time to time, reset averagemeters to see improvements
region_loss.l_x.reset()
region_loss.l_y.reset()
region_loss.l_w.reset()
region_loss.l_h.reset()
region_loss.l_conf.reset()
region_loss.l_cls.reset()
region_loss.l_total.reset()
t1 = time.time()
logging('trained with %f samples/s' % (len(train_loader.dataset) / (t1 - t0)))
print('')
每一次迭代,都使用adjust_learning_rate,觉得是否调整学习率。下在看下模型前向传播的tensor的shape变化:output = model(data)。这里data的shape为:
,其中的4是batch size,每批有四个数据。现在进入(step into)查看,到了YOWO的forward函数中:
def forward(self, input):
x_3d = input # Input clip
x_2d = input[:, :, -1, :, :] # Last frame of the clip that is read
x_2d = self.backbone_2d(x_2d)
x_3d = self.backbone_3d(x_3d)
x_3d = torch.squeeze(x_3d, dim=2)
x = torch.cat((x_3d, x_2d), dim=1)
x = self.cfam(x)
out = self.conv_final(x)
return out
x_3d是对应整个视频,而x_2d只是对应视频的最好一帧(上面在生成数据的时候讲到,是根据标注的图片,向前采样,所以x_2d是整个视频序列的最后一帧)。整个流程如下:
- x_2d输入到2d网络中:
x_2d = self.backbone_2d(x_2d),输出的shape为 ,这个是yolov2的预测机制,把图像分成 大小的grid cell,每个grid cell使用5个anchor预测80个类别的坐标,这就是425的由来,即 。 - x_3d输入到3d网络中:
x_3d = self.backbone_3d(x_3d),输出的shape为 。 - 按照论文的要求是需要把x_3d和x_2d按通道拼接,但是x_3d多了一个维度(depth),所以使用
x_3d = torch.squeeze(x_3d, dim=2)压缩维度。 - 再使用
x = torch.cat((x_3d, x_2d), dim=1)进行通道拼接。 - 接着再输入CFAM模块
x = self.cfam(x),得到输出x,其shape为
最后再使用一个卷积层,得到行为理解的时空定位:out = self.conv_final(x),其中:self.conv_final = nn.Conv2d(1024, 5*(opt.n_classes+4+1), kernel_size=1, bias=False),其中opt.n_classes = 24,即实现对行为理解的24分类。最后输出的out的shape为: 。
通过上述分析,了解到模型中的output,即上文out,的由来。接下来,便是loss的计算:loss = region_loss(output, target)。进入(step into)其中进行查看,即RegionLoss类的forward函数:
def forward(self, output, target):
# output : B*A*(4+1+num_classes)*H*W
# B: number of batches
# A: number of anchors
# 4: 4 parameters for each bounding box
# 1: confidence score
# num_classes
# H: height of the image (in grids)
# W: width of the image (in grids)
# for each grid cell, there are A*(4+1+num_classes) parameters
t0 = time.time()
nB = output.data.size(0)
nA = self.num_anchors
nC = self.num_classes
nH = output.data.size(2)
nW = output.data.size(3)
# resize the output (all parameters for each anchor can be reached)
output = output.view(nB, nA, (5+nC), nH, nW)
# anchor's parameter tx
x = torch.sigmoid(output.index_select(2, Variable(torch.cuda.LongTensor([0]))).view(nB, nA, nH, nW))
# anchor's parameter ty
y = torch.sigmoid(output.index_select(2, Variable(torch.cuda.LongTensor([1]))).view(nB, nA, nH, nW))
# anchor's parameter tw
w = output.index_select(2, Variable(torch.cuda.LongTensor([2]))).view(nB, nA, nH, nW)
# anchor's parameter th
h = output.index_select(2, Variable(torch.cuda.LongTensor([3]))).view(nB, nA, nH, nW)
# confidence score for each anchor
conf = torch.sigmoid(output.index_select(2, Variable(torch.cuda.LongTensor([4]))).view(nB, nA, nH, nW))
# anchor's parameter class label
cls = output.index_select(2, Variable(torch.linspace(5,5+nC-1,nC).long().cuda()))
# resize the data structure so that for every anchor there is a class label in the last dimension
cls = cls.view(nB*nA, nC, nH*nW).transpose(1,2).contiguous().view(nB*nA*nH*nW, nC)
t1 = time.time()
# for the prediction of localization of each bounding box, there exist 4 parameters (tx, ty, tw, th)
pred_boxes = torch.cuda.FloatTensor(4, nB*nA*nH*nW)
# tx and ty
grid_x = torch.linspace(0, nW-1, nW).repeat(nH,1).repeat(nB*nA, 1, 1).view(nB*nA*nH*nW).cuda()
grid_y = torch.linspace(0, nH-1, nH).repeat(nW,1).t().repeat(nB*nA, 1, 1).view(nB*nA*nH*nW).cuda()
# for each anchor there are anchor_step variables (with the structure num_anchor*anchor_step)
# for each row(anchor), the first variable is anchor's width, second is anchor's height
# pw and ph
anchor_w = torch.Tensor(self.anchors).view(nA, self.anchor_step).index_select(1, torch.LongTensor([0])).cuda()
anchor_h = torch.Tensor(self.anchors).view(nA, self.anchor_step).index_select(1, torch.LongTensor([1])).cuda()
# for each pixel (grid) repeat the above process (obtain width and height of each grid)
anchor_w = anchor_w.repeat(nB, 1).repeat(1, 1, nH*nW).view(nB*nA*nH*nW)
anchor_h = anchor_h.repeat(nB, 1).repeat(1, 1, nH*nW).view(nB*nA*nH*nW)
# prediction of bounding box localization
# x.data and y.data: top left corner of the anchor
# grid_x, grid_y: tx and ty predictions made by yowo
x_data = x.data.view(-1)
y_data = y.data.view(-1)
w_data = w.data.view(-1)
h_data = h.data.view(-1)
pred_boxes[0] = x_data + grid_x # bx
pred_boxes[1] = y_data + grid_y # by
pred_boxes[2] = torch.exp(w_data) * anchor_w # bw
pred_boxes[3] = torch.exp(h_data) * anchor_h # bh
# the size -1 is inferred from other dimensions
# pred_boxes (nB*nA*nH*nW, 4)
pred_boxes = convert2cpu(pred_boxes.transpose(0,1).contiguous().view(-1,4))
t2 = time.time()
nGT, nCorrect, coord_mask, conf_mask, cls_mask, tx, ty, tw, th, tconf, tcls = build_targets(pred_boxes, target.data, self.anchors, nA, nC, \
nH, nW, self.noobject_scale, self.object_scale, self.thresh, self.seen)
cls_mask = (cls_mask == 1)
# keep those with high box confidence scores (greater than 0.25) as our final predictions
nProposals = int((conf > 0.25).sum().data.item())
tx = Variable(tx.cuda())
ty = Variable(ty.cuda())
tw = Variable(tw.cuda())
th = Variable(th.cuda())
tconf = Variable(tconf.cuda())
tcls = Variable(tcls.view(-1)[cls_mask.view(-1)].long().cuda())
coord_mask = Variable(coord_mask.cuda())
conf_mask = Variable(conf_mask.cuda().sqrt())
cls_mask = Variable(cls_mask.view(-1, 1).repeat(1,nC).cuda())
cls = cls[cls_mask].view(-1, nC)
t3 = time.time()
# losses between predictions and targets (ground truth)
# In total 6 aspects are considered as losses:
# 4 for bounding box location, 2 for prediction confidence and classification seperately
loss_x = self.coord_scale * nn.SmoothL1Loss(reduction='sum')(x*coord_mask, tx*coord_mask)/2.0
loss_y = self.coord_scale * nn.SmoothL1Loss(reduction='sum')(y*coord_mask, ty*coord_mask)/2.0
loss_w = self.coord_scale * nn.SmoothL1Loss(reduction='sum')(w*coord_mask, tw*coord_mask)/2.0
loss_h = self.coord_scale * nn.SmoothL1Loss(reduction='sum')(h*coord_mask, th*coord_mask)/2.0
loss_conf = nn.MSELoss(reduction='sum')(conf*conf_mask, tconf*conf_mask)/2.0
# try focal loss with gamma = 2
FL = FocalLoss(class_num=24, gamma=2, size_average=False)
loss_cls = self.class_scale * FL(cls, tcls)
# sum of loss
loss = loss_x + loss_y + loss_w + loss_h + loss_conf + loss_cls
#print(loss)
t4 = time.time()
self.l_x.update(loss_x.data.item(), self.batch)
self.l_y.update(loss_y.data.item(), self.batch)
self.l_w.update(loss_w.data.item(), self.batch)
self.l_h.update(loss_h.data.item(), self.batch)
self.l_conf.update(loss_conf.data.item(), self.batch)
self.l_cls.update(loss_cls.data.item(), self.batch)
self.l_total.update(loss.data.item(), self.batch)
if False:
print('-----------------------------------')
print(' activation : %f' % (t1 - t0))
print(' create pred_boxes : %f' % (t2 - t1))
print(' build targets : %f' % (t3 - t2))
print(' create loss : %f' % (t4 - t3))
print(' total : %f' % (t4 - t0))
print('%d: nGT %d, recall %d, proposals %d, loss: x %.2f(%.2f), '
'y %.2f(%.2f), w %.2f(%.2f), h %.2f(%.2f), conf %.2f(%.2f), '
'cls %.2f(%.2f), total %.2f(%.2f)'
% (self.seen, nGT, nCorrect, nProposals, self.l_x.val, self.l_x.avg,
self.l_y.val, self.l_y.avg, self.l_w.val, self.l_w.avg,
self.l_h.val, self.l_h.avg, self.l_conf.val, self.l_conf.avg,
self.l_cls.val, self.l_cls.avg, self.l_total.val, self.l_total.avg))
return loss
nB是batch size,nA是anchor数,nC是类别数,nH是特征图feature map,即output,的高,同理,nW是宽。output = output.view(nB, nA, (5+nC), nH, nW)讲output的shape进行重塑。
接下来的x = torch.sigmoid(output.index_select(2, Variable(torch.cuda.LongTensor([0]))).view(nB, nA, nH, nW)) 到conf = torch.sigmoid(output.index_select(2, Variable(torch.cuda.LongTensor([4]))).view(nB, nA, nH, nW)),则是分别得到每个anchor的预测的x,y,w,h和confidence(置信度得分)。cls = output.index_select(2, Variable(torch.linspace(5,5+nC-1,nC).long().cuda()))则是得到每个anchor在每一个gird cell上的类别预测结构,其shape为:
。接下来调整数据结构的大小,以便在最后一个维度中为每个锚(anchor)都有一个类(class)标签:cls = cls.view(nB*nA, nC, nH*nW).transpose(1,2).contiguous().view(nB*nA*nH*nW, nC),现在的shape为
,其中
,表示有980个anchor。
对于每个边界框的定位预测,有4个参数(tx,ty,tw,th)。接下来生成grid cell的坐标索引,查看grid_x和grid_y:

一共980个anchor,grid_x和grid_y分别对应每个anchor的x和y的索引,即【0,0】、【0,1】…【0,6】、【1,0】…
接下来是获取cfg文件中anchor的宽和高,即anchor_w和anchor_h。下面的代码则是把cfg中每个anchor的宽和高分别映射到那980个anchor中:
anchor_w = anchor_w.repeat(nB, 1).repeat(1, 1, nH*nW).view(nB*nA*nH*nW)
anchor_h = anchor_h.repeat(nB, 1).repeat(1, 1, nH*nW).view(nB*nA*nH*nW)
查看shape:


为了和980个anchor对应起来,把x,y,w和h,拉平(flatten),生成对应的x_data,y_data,w_data和h_data。加上偏移量和放缩量,得到预测框的位置:
pred_boxes[0] = x_data + grid_x # bx
pred_boxes[1] = y_data + grid_y # by
pred_boxes[2] = torch.exp(w_data) * anchor_w # bw
pred_boxes[3] = torch.exp(h_data) * anchor_h # bh
如果这里看不懂,可以查看一下yolov2的论文,关于边界框预测的机制,即下图:

接下来把pred_boxes放在cpu上,并重塑其shape为
。
然后代码进行计算:nGT, nCorrect, coord_mask, conf_mask, cls_mask, tx, ty, tw, th, tconf, tcls = build_targets(pred_boxes, target.data, self.anchors, nA, nC, nH, nW, self.noobject_scale, self.object_scale, self.thresh, self.seen),查看函数build_targets,完整代码如下:
def build_targets(pred_boxes, target, anchors, num_anchors, num_classes, nH, nW, noobject_scale, object_scale, sil_thresh, seen):
# nH, nW here are number of grids in y and x directions (7, 7 here)
nB = target.size(0) # batch size
nA = num_anchors # 5 for our case
nC = num_classes
anchor_step = len(anchors)//num_anchors
conf_mask = torch.ones(nB, nA, nH, nW) * noobject_scale
coord_mask = torch.zeros(nB, nA, nH, nW)
cls_mask = torch.zeros(nB, nA, nH, nW)
tx = torch.zeros(nB, nA, nH, nW)
ty = torch.zeros(nB, nA, nH, nW)
tw = torch.zeros(nB, nA, nH, nW)
th = torch.zeros(nB, nA, nH, nW)
tconf = torch.zeros(nB, nA, nH, nW)
tcls = torch.zeros(nB, nA, nH, nW)
# for each grid there are nA anchors
# nAnchors is the number of anchor for one image
nAnchors = nA*nH*nW
nPixels = nH*nW
# for each image
for b in xrange(nB):
# get all anchor boxes in one image
# (4 * nAnchors)
cur_pred_boxes = pred_boxes[b*nAnchors:(b+1)*nAnchors].t()
# initialize iou score for each anchor
cur_ious = torch.zeros(nAnchors)
for t in xrange(50):
# for each anchor 4 coordinate parameters, already in the coordinate system for the whole image
# this loop is for anchors in each image
# for each anchor 5 parameters are available (class, x, y, w, h)
if target[b][t*5+1] == 0:
break
gx = target[b][t*5+1]*nW
gy = target[b][t*5+2]*nH
gw = target[b][t*5+3]*nW
gh = target[b][t*5+4]*nH
# groud truth boxes
cur_gt_boxes = torch.FloatTensor([gx,gy,gw,gh]).repeat(nAnchors,1).t()
# bbox_ious is the iou value between orediction and groud truth
cur_ious = torch.max(cur_ious, bbox_ious(cur_pred_boxes, cur_gt_boxes, x1y1x2y2=False))
# if iou > a given threshold, it is seen as it includes an object
# conf_mask[b][cur_ious>sil_thresh] = 0
conf_mask_t = conf_mask.view(nB, -1)
conf_mask_t[b][cur_ious>sil_thresh] = 0
conf_mask_tt = conf_mask_t[b].view(nA, nH, nW)
conf_mask[b] = conf_mask_tt
if seen < 12800:
if anchor_step == 4:
tx = torch.FloatTensor(anchors).view(nA, anchor_step).index_select(1, torch.LongTensor([2])).view(1,nA,1,1).repeat(nB,1,nH,nW)
ty = torch.FloatTensor(anchors).view(num_anchors, anchor_step).index_select(1, torch.LongTensor([2])).view(1,nA,1,1).repeat(nB,1,nH,nW)
else:
tx.fill_(0.5)
ty.fill_(0.5)
tw.zero_()
th.zero_()
coord_mask.fill_(1)
# number of ground truth
nGT = 0
nCorrect = 0
for b in xrange(nB):
# anchors for one batch (at least batch size, and for some specific classes, there might exist more than one anchor)
for t in xrange(50):
if target[b][t*5+1] == 0:
break
nGT = nGT + 1
best_iou = 0.0
best_n = -1
min_dist = 10000
# the values saved in target is ratios
# times by the width and height of the output feature maps nW and nH
gx = target[b][t*5+1] * nW
gy = target[b][t*5+2] * nH
gi = int(gx)
gj = int(gy)
gw = target[b][t*5+3] * nW
gh = target[b][t*5+4] * nH
gt_box = [0, 0, gw, gh]
for n in xrange(nA):
# get anchor parameters (2 values)
aw = anchors[anchor_step*n]
ah = anchors[anchor_step*n+1]
anchor_box = [0, 0, aw, ah]
# only consider the size (width and height) of the anchor box
iou = bbox_iou(anchor_box, gt_box, x1y1x2y2=False)
if anchor_step == 4:
ax = anchors[anchor_step*n+2]
ay = anchors[anchor_step*n+3]
dist = pow(((gi+ax) - gx), 2) + pow(((gj+ay) - gy), 2)
# get the best anchor form with the highest iou
if iou > best_iou:
best_iou = iou
best_n = n
elif anchor_step==4 and iou == best_iou and dist < min_dist:
best_iou = iou
best_n = n
min_dist = dist
# then we determine the parameters for an anchor (4 values together)
gt_box = [gx, gy, gw, gh]
# find corresponding prediction box
pred_box = pred_boxes[b*nAnchors+best_n*nPixels+gj*nW+gi]
# only consider the best anchor box, for each image
coord_mask[b][best_n][gj][gi] = 1
cls_mask[b][best_n][gj][gi] = 1
# in this cell of the output feature map, there exists an object
conf_mask[b][best_n][gj][gi] = object_scale
tx[b][best_n][gj][gi] = target[b][t*5+1] * nW - gi
ty[b][best_n][gj][gi] = target[b][t*5+2] * nH - gj
tw[b][best_n][gj][gi] = math.log(gw/anchors[anchor_step*best_n])
th[b][best_n][gj][gi] = math.log(gh/anchors[anchor_step*best_n+1])
iou = bbox_iou(gt_box, pred_box, x1y1x2y2=False) # best_iou
# confidence equals to iou of the corresponding anchor
tconf[b][best_n][gj][gi] = iou
tcls[b][best_n][gj][gi] = target[b][t*5]
# if ious larger than 0.5, we justify it as a correct prediction
if iou > 0.5:
nCorrect = nCorrect + 1
# true values are returned
return nGT, nCorrect, coord_mask, conf_mask, cls_mask, tx, ty, tw, th, tconf, tcls
这个函数用于构建groud truth(标注),显示生成shape为
大小的conf_mask,…,tcls。这个build_targets和我在博文Pytorch | yolov3原理及代码详解(二)提到的基本一致。对每个grid都有nA(5)个anchor,nA是一张图片上使用的anchor数量。
接下来来开始遍历:for b in xrange(nB):,获取每张图片的所有anchor。获取当前的所有的预测框:cur_pred_boxes = pred_boxes[b*nAnchors:(b+1)*nAnchors].t()其shape为
。一张图上有245个anchor,由
计算而来。对于每个anchor4个坐标参数,已在整个图像的坐标系中。此循环用于每个图像中的anchor:for t in xrange(50):,这个50与建立label时默认最多50个target对应。对于每个anchor,有5个参数可用(class,x,y,w,h)。
根据target,乘以特征图feature map的高(nH)和宽(nW)的系数,得到在
大小的特征图中的绝对坐标:gx,gy,gw,gh。通过这四个值,即可得到ground truth boxes(标注的边界框)cur_gt_boxes。
接下来计算iou值:cur_ious = torch.max(cur_ious, bbox_ious(cur_pred_boxes, cur_gt_boxes, x1y1x2y2=False)),查看完整代码:
def bbox_ious(boxes1, boxes2, x1y1x2y2=True):
if x1y1x2y2:
mx = torch.min(boxes1[0], boxes2[0])
Mx = torch.max(boxes1[2], boxes2[2])
my = torch.min(boxes1[1], boxes2[1])
My = torch.max(boxes1[3], boxes2[3])
w1 = boxes1[2] - boxes1[0]
h1 = boxes1[3] - boxes1[1]
w2 = boxes2[2] - boxes2[0]
h2 = boxes2[3] - boxes2[1]
else:
mx = torch.min(boxes1[0]-boxes1[2]/2.0, boxes2[0]-boxes2[2]/2.0)
Mx = torch.max(boxes1[0]+boxes1[2]/2.0, boxes2[0]+boxes2[2]/2.0)
my = torch.min(boxes1[1]-boxes1[3]/2.0, boxes2[1]-boxes2[3]/2.0)
My = torch.max(boxes1[1]+boxes1[3]/2.0, boxes2[1]+boxes2[3]/2.0)
w1 = boxes1[2]
h1 = boxes1[3]
w2 = boxes2[2]
h2 = boxes2[3]
uw = Mx - mx
uh = My - my
cw = w1 + w2 - uw
ch = h1 + h2 - uh
mask = ((cw <= 0) + (ch <= 0) > 0)
area1 = w1 * h1
area2 = w2 * h2
carea = cw * ch
carea[mask] = 0
uarea = area1 + area2 - carea
return carea/uarea
这里的x1y1x2y2设置的是False,计算每个anchor和target的iou值,如果iou>一个给定的阈值,它被视为包含一个对象,则conf_mask置为0(具体见下loss分析),下面的一段代码目前没有看懂,可能大概是优化策略 :
if seen < 12800:
if anchor_step == 4:
tx = torch.FloatTensor(anchors).view(nA, anchor_step).index_select(1, torch.LongTensor([2])).view(1,nA,1,1).repeat(nB,1,nH,nW)
ty = torch.FloatTensor(anchors).view(num_anchors, anchor_step).index_select(1, torch.LongTensor([2])).view(1,nA,1,1).repeat(nB,1,nH,nW)
else:
tx.fill_(0.5)
ty.fill_(0.5)
tw.zero_()
th.zero_()
coord_mask.fill_(1)
接下来分batch,计算ground truth。针对每一批,某些类可能存在多个target。所以会存在循环:for t in xrange(50):。
gx,gy是target 在特征图上的绝对坐标,gi,gj是target在grid cell方格坐标的左上角(这个是yolo的预测机制),gw和gh则是target 在特征图上的绝对宽高。接下来是获取anchor,并计算IOU值,选择具有最高IOU值的anchor,也就是这个iou值计算,是为了选择一个anchor,能和target产生最大的IOU,并选择这个anchor进行预测,即“具体是哪个anchor box预测它,需要在训练中确定,即由那个与ground truth的IOU最大的anchor box预测它”,这个我也在博文在Pytorch | yolov3原理及代码详解(二)中详细分析过,不再赘述。目前anchor_step==4的情况我不能确定是什么模式,大概率是使用4个值来表示一个anchor。
接下来得到targte在特征图上的绝对表示:gt_box = [gx, gy, gw, gh],选择具有最高IOU值的anchor预测的box:pred_box = pred_boxes[b*nAnchors+best_n*nPixels+gj*nW+gi]。并且,只考虑每个图像的最佳anchor,如果iou值大于阈值,则认为正确预测一个:
# only consider the best anchor box, for each image
coord_mask[b][best_n][gj][gi] = 1
cls_mask[b][best_n][gj][gi] = 1
# in this cell of the output feature map, there exists an object
conf_mask[b][best_n][gj][gi] = object_scale
tx[b][best_n][gj][gi] = target[b][t*5+1] * nW - gi
ty[b][best_n][gj][gi] = target[b][t*5+2] * nH - gj
tw[b][best_n][gj][gi] = math.log(gw/anchors[anchor_step*best_n])
th[b][best_n][gj][gi] = math.log(gh/anchors[anchor_step*best_n+1])
iou = bbox_iou(gt_box, pred_box, x1y1x2y2=False) # best_iou
# confidence equals to iou of the corresponding anchor
tconf[b][best_n][gj][gi] = iou
tcls[b][best_n][gj][gi] = target[b][t*5]
# if ious larger than 0.5, we justify it as a correct prediction
if iou > 0.5:
nCorrect = nCorrect + 1
计算完毕后,返回到RegionLoss类的forward中,保留那些置信度高(大于0.25)的边界框作为最终预测。接下来把变量放进GPU中。接着便是loss值的计算:
# losses between predictions and targets (ground truth)
# In total 6 aspects are considered as losses:
# 4 for bounding box location, 2 for prediction confidence and classification seperately
loss_x = self.coord_scale * nn.SmoothL1Loss(reduction='sum')(x*coord_mask, tx*coord_mask)/2.0
loss_y = self.coord_scale * nn.SmoothL1Loss(reduction='sum')(y*coord_mask, ty*coord_mask)/2.0
loss_w = self.coord_scale * nn.SmoothL1Loss(reduction='sum')(w*coord_mask, tw*coord_mask)/2.0
loss_h = self.coord_scale * nn.SmoothL1Loss(reduction='sum')(h*coord_mask, th*coord_mask)/2.0
loss_conf = nn.MSELoss(reduction='sum')(conf*conf_mask, tconf*conf_mask)/2.0
# try focal loss with gamma = 2
FL = FocalLoss(class_num=24, gamma=2, size_average=False)
loss_cls = self.class_scale * FL(cls, tcls)
# sum of loss
loss = loss_x + loss_y + loss_w + loss_h + loss_conf + loss_cls
这里的损失函数分为3个部分:1.边框损失:(x,y,w,h)。2.置信度损失。3.分类损失。这个损失函数不是原本的yolov2的损失函数。边界框使用的是Smooth L1损失,目标检测中, 如果存在异常点, 如预测4个点, 有一个点偏离很大, L2loss会平方误差, 放大误差, L1对误差的鲁棒性更好。本来coord_mask是为了限制target和best anchor进行loss计算,但是当self.seen < 12800,会被全部置1coord_mask.fill_(1),我猜测是为了前期训练时,是为了使那些即使不是best iou的anchor也回归到 target上,即有生成Better的anchor,说不定就会有新的best anchor从其中产生,而不是一开始就否定(但是那个tw.zero_()和th.zero_()目前还没有搞懂)。
关于yolov2的loss函数分析具体可见YOLOv2损失函数详解,loss函数的具体形式为:
其损失函数可以分为三个部分:
- 1.
这个loss是计算background的置信度误差。这里需要计算各个预测框和所有的ground truth之间的IOU值,并且取最大值记作MaxIOU,如果该值小于一定的阈值,YOLOv2论文取了0.6(本代码中的sil_thresh),那么这个预测框就标记为background(可以这么理解:如果所有anchor和target的IOU都太低,说明这些anchor就不适合预测target,那么就应该去预测的是背景background):conf_mask_t[b][cur_ious>sil_thresh] = 0,同时注意到:conf_mask = torch.ones(nB, nA, nH, nW) * noobject_scale,noobject_scale的取值为1,即 。这句话的含义是指,如果有物体则 ,反之,如果没有物体则 。那么第一项就可以写为:
- 2.
这一部分是计算Anchor boxes和预测框的坐标误差,但是只在前12800个iter计算,和我的猜测一样,是为了促进网络学习到Anchor的形状。 - 3.
这一部分计算的是和ground truth匹配的预测框各部分的损失总和,包括坐标损失,置信度损失以及分类损失。坐标损失上述已经提过使用了smooth L1 损失。关于置信度损失,增加了一项 权重系数(代码中的self.object_scale)。对于best anchor进设置conf_mask[b][best_n][gj][gi] = object_scale,本代码其值为5。但是注意到:conf_mask = torch.ones(nB, nA, nH, nW) * noobject_scale,出去被标记为background的anchor被设置为0以外,其余anchor的conf_mask被设置为1。当其为1时,损失是预测框和ground truth的真实IOU值,当其为5时,则应该计算的是best anchor与ground truth,设置为5,应该是增加梯度,倾向于best anchor快速回归到target上面,剩下的则是那些Max_IOU低于阈值的,被设置为0,则进行忽略。最后的类别损失,和上述有点不同,是使用了Focal Loss,来解决类别分类不平衡的问题。
在计算完loss之后,则进行反向传播进行优化,整个训练流程基本分析完毕,剩下的则是test部分。
关于test部分的分析请见:
Pytorch|YOWO原理及代码详解(三)
