urdf模型优化
一些概念
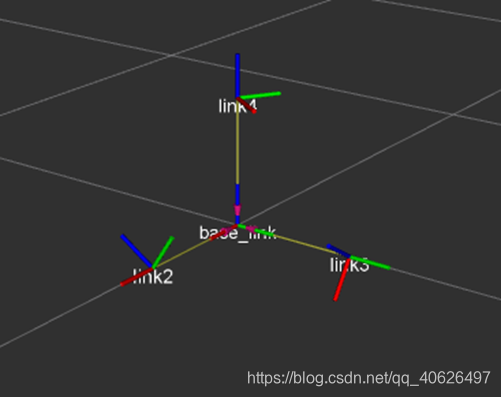
上图中以
- base_link:基准
- 红色:x轴
- 绿色:y轴
- 蓝色:z轴
origin:xyz
- 以parent link为原点,child link的三维坐标系位置
origin:rpy是child link:
- 绕z轴旋转的滚动角(roll)
- 绕y轴方向旋转的俯仰(pitch)角
- 绕x轴旋转的偏转(yaw)角
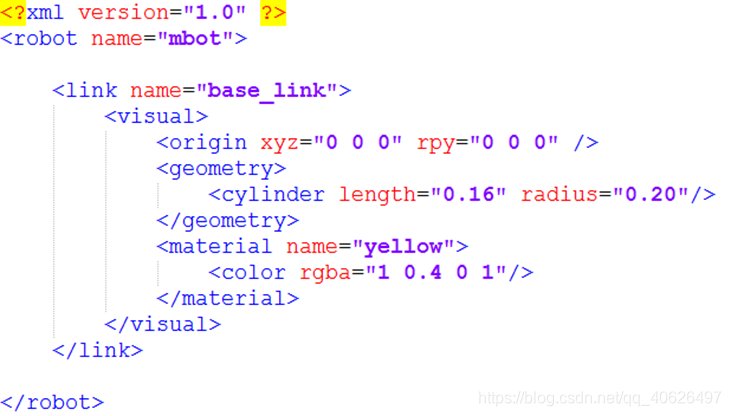
<geometry>:定义link形状<material>:定义link材料<origin>:定义link相对于自己原来位置的变化
urdf描述机器人模型问题所在?

- 模型冗长,重复多
- 修改参数麻烦,不便于二次开发
- 没有参数计算功能
- 等等…
urdf模型的进化版本——xacro模型文件

- 精简模型代码
- 创建宏定义
- 文件包含
- 提供可编程接口
- 常量
- 变量
- 条件语句
- 数学计算
常量
常量定义
<xacro:property name="M_PI" value="3.14159" />
常量使用
<origin xyz="0 0 0" rpy="${M_PI/2} 0 0" />
样例

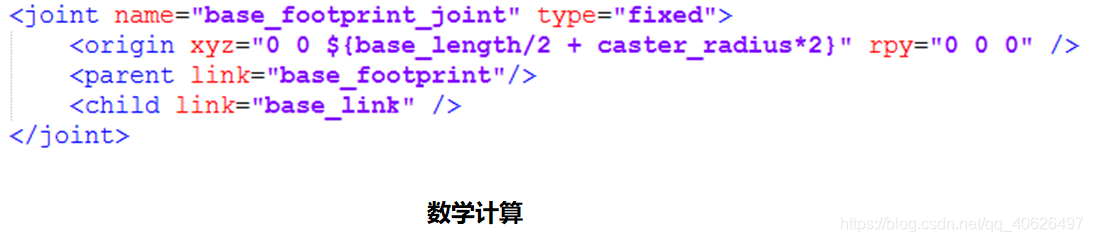
数学计算
<origin xyz="0 ${(motor_length+wheel_length)/2} 0" rpy="0 0 0" />
样例
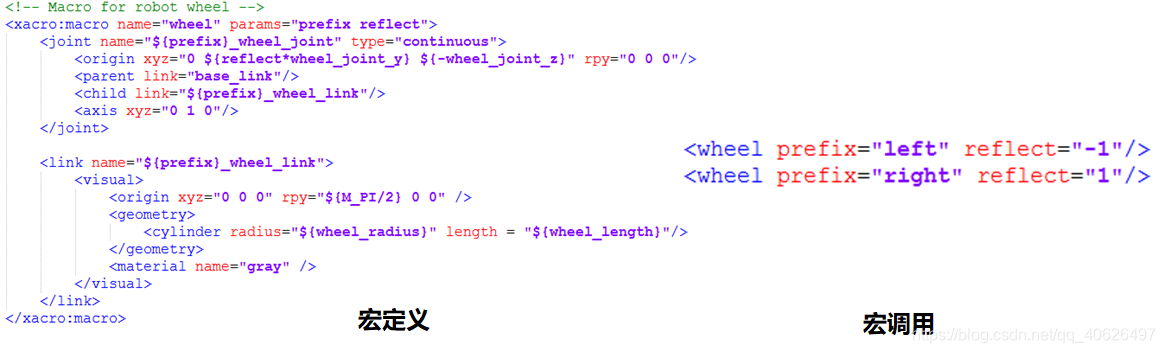
宏定义
宏定义
<xacro:macro name="name" params="A B C">
...
</xacro:macro>
宏调用
<name A="A_value" B="B_value" C="C_value" />
样例
文件包含
xacro文件中也可包含其他的xacro文件,具体格式如下:
<xacro:include filename="$(find mbot_description)/urdf/xacro/mbot_base.xacro" />
样例

模型显示
将xacro文件转换成URDF文件后显示
rosrun xacro xacro.py mbot.xacro > mbot.urdf
直接调用xacro文件解析器
<arg name="model" default="$(find xacro)/xacro --inorder '$(find mbot_description)/urdf/xacro/mbot.xacro'" />
<param name="robot_description" command="$(arg model)" />

gazebo物理仿真
在gazebo中仿真时需要添加以下内容:
- 为每个link添加惯性参数以及碰撞参数
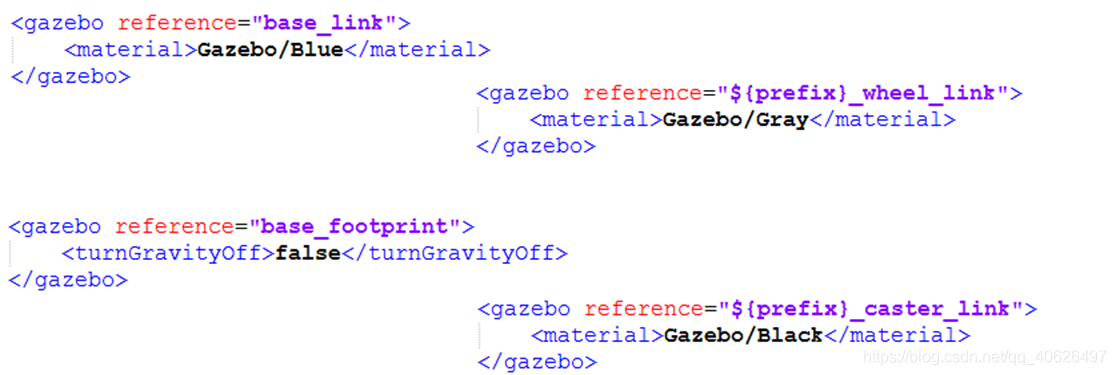
- 为每个link添加gazebo标签
- 为能动的joint添加传动和动力装置
- 添加控制器插件
详细代码如下:(src3/mbot_description/urdf/xacro/gazebo/mbot_base_gazebo.xacro)
<?xml version="1.0"?>
<robot name="mbot" xmlns:xacro="http://www.ros.org/wiki/xacro">
<!-- PROPERTY LIST -->
<xacro:property name="M_PI" value="3.1415926"/>
<xacro:property name="base_mass" value="20" />
<xacro:property name="base_radius" value="0.20"/>
<xacro:property name="base_length" value="0.16"/>
<xacro:property name="wheel_mass" value="2" />
<xacro:property name="wheel_radius" value="0.06"/>
<xacro:property name="wheel_length" value="0.025"/>
<xacro:property name="wheel_joint_y" value="0.19"/>
<xacro:property name="wheel_joint_z" value="0.05"/>
<xacro:property name="caster_mass" value="0.5" />
<xacro:property name="caster_radius" value="0.015"/> <!-- wheel_radius - ( base_length/2 - wheel_joint_z) -->
<xacro:property name="caster_joint_x" value="0.18"/>
<!-- Defining the colors used in this robot -->
<material name="yellow">
<color rgba="1 0.4 0 1"/>
</material>
<material name="black">
<color rgba="0 0 0 0.95"/>
</material>
<material name="gray">
<color rgba="0.75 0.75 0.75 1"/>
</material>
<!-- Macro for inertia matrix -->
<xacro:macro name="sphere_inertial_matrix" params="m r">
<inertial>
<mass value="${m}" />
<inertia ixx="${2*m*r*r/5}" ixy="0" ixz="0"
iyy="${2*m*r*r/5}" iyz="0"
izz="${2*m*r*r/5}" />
</inertial>
</xacro:macro>
<xacro:macro name="cylinder_inertial_matrix" params="m r h">
<inertial>
<mass value="${m}" />
<inertia ixx="${m*(3*r*r+h*h)/12}" ixy = "0" ixz = "0"
iyy="${m*(3*r*r+h*h)/12}" iyz = "0"
izz="${m*r*r/2}" />
</inertial>
</xacro:macro>
<!-- Macro for robot wheel -->
<xacro:macro name="wheel" params="prefix reflect">
<joint name="${prefix}_wheel_joint" type="continuous">
<origin xyz="0 ${reflect*wheel_joint_y} ${-wheel_joint_z}" rpy="0 0 0"/>
<parent link="base_link"/>
<child link="${prefix}_wheel_link"/>
<axis xyz="0 1 0"/>
</joint>
<link name="${prefix}_wheel_link">
<visual>
<origin xyz="0 0 0" rpy="${M_PI/2} 0 0" />
<geometry>
<cylinder radius="${wheel_radius}" length = "${wheel_length}"/>
</geometry>
<material name="gray" />
</visual>
<collision>
<origin xyz="0 0 0" rpy="${M_PI/2} 0 0" />
<geometry>
<cylinder radius="${wheel_radius}" length = "${wheel_length}"/>
</geometry>
</collision>
<cylinder_inertial_matrix m="${wheel_mass}" r="${wheel_radius}" h="${wheel_length}" />
</link>
<gazebo reference="${prefix}_wheel_link">
<material>Gazebo/Gray</material>
</gazebo>
<!-- Transmission is important to link the joints and the controller -->
<transmission name="${prefix}_wheel_joint_trans">
<type>transmission_interface/SimpleTransmission</type>
<joint name="${prefix}_wheel_joint" >
<hardwareInterface>hardware_interface/VelocityJointInterface</hardwareInterface>
</joint>
<actuator name="${prefix}_wheel_joint_motor">
<hardwareInterface>hardware_interface/VelocityJointInterface</hardwareInterface>
<mechanicalReduction>1</mechanicalReduction>
</actuator>
</transmission>
</xacro:macro>
<!-- Macro for robot caster -->
<xacro:macro name="caster" params="prefix reflect">
<joint name="${prefix}_caster_joint" type="continuous">
<origin xyz="${reflect*caster_joint_x} 0 ${-(base_length/2 + caster_radius)}" rpy="0 0 0"/>
<parent link="base_link"/>
<child link="${prefix}_caster_link"/>
<axis xyz="0 1 0"/>
</joint>
<link name="${prefix}_caster_link">
<visual>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<sphere radius="${caster_radius}" />
</geometry>
<material name="black" />
</visual>
<collision>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<sphere radius="${caster_radius}" />
</geometry>
</collision>
<sphere_inertial_matrix m="${caster_mass}" r="${caster_radius}" />
</link>
<gazebo reference="${prefix}_caster_link">
<material>Gazebo/Black</material>
</gazebo>
</xacro:macro>
<xacro:macro name="mbot_base_gazebo">
<link name="base_footprint">
<visual>
<origin xyz="0 0 0" rpy="0 0 0" />
<geometry>
<box size="0.001 0.001 0.001" />
</geometry>
</visual>
</link>
<gazebo reference="base_footprint">
<turnGravityOff>false</turnGravityOff>
</gazebo>
<joint name="base_footprint_joint" type="fixed">
<origin xyz="0 0 ${base_length/2 + caster_radius*2}" rpy="0 0 0" />
<parent link="base_footprint"/>
<child link="base_link" />
</joint>
<link name="base_link">
<visual>
<origin xyz=" 0 0 0" rpy="0 0 0" />
<geometry>
<cylinder length="${base_length}" radius="${base_radius}"/>
</geometry>
<material name="yellow" />
</visual>
<collision>
<origin xyz=" 0 0 0" rpy="0 0 0" />
<geometry>
<cylinder length="${base_length}" radius="${base_radius}"/>
</geometry>
</collision>
<cylinder_inertial_matrix m="${base_mass}" r="${base_radius}" h="${base_length}" />
</link>
<gazebo reference="base_link">
<material>Gazebo/Blue</material>
</gazebo>
<wheel prefix="left" reflect="-1"/>
<wheel prefix="right" reflect="1"/>
<caster prefix="front" reflect="-1"/>
<caster prefix="back" reflect="1"/>
<!-- controller -->
<gazebo>
<plugin name="differential_drive_controller"
filename="libgazebo_ros_diff_drive.so">
<rosDebugLevel>Debug</rosDebugLevel>
<publishWheelTF>true</publishWheelTF>
<robotNamespace>/</robotNamespace>
<publishTf>1</publishTf>
<publishWheelJointState>true</publishWheelJointState>
<alwaysOn>true</alwaysOn>
<updateRate>100.0</updateRate>
<legacyMode>true</legacyMode>
<leftJoint>left_wheel_joint</leftJoint>
<rightJoint>right_wheel_joint</rightJoint>
<wheelSeparation>${wheel_joint_y*2}</wheelSeparation>
<wheelDiameter>${2*wheel_radius}</wheelDiameter>
<broadcastTF>1</broadcastTF>
<wheelTorque>30</wheelTorque>
<wheelAcceleration>1.8</wheelAcceleration>
<commandTopic>cmd_vel</commandTopic>
<odometryFrame>odom</odometryFrame>
<odometryTopic>odom</odometryTopic>
<robotBaseFrame>base_footprint</robotBaseFrame>
</plugin>
</gazebo>
</xacro:macro>
</robot>
在Gazebo工作前,我们需要安装ROS功能包与Gazebo通信:
sudo apt-get install ros-kinetic-gazebo-ros-pkgs ros-kinetic-gazebo-ros-control
配置机器人物理模型
为link添加惯性参数和碰撞属性

为link添加gazebo标签
为joint添加传动装置

添加gazebo控制器插件

<robotNamespace>:机器人的命名空间<leftJoint>和<rightJoint>:左右轮转动的关节joint<wheelSeparation>和<wheelDiameter>:机器人模型的相关尺寸,在计算差速参数时需要用到<commandTopic>:控制器订阅的速度控制指令,生成全局命令时需要结合<robotNamespace>中设置的命名空间<odometryFrame>:里程计数据的参考坐标系,ROS中一般都命名为odom
在gazebo中加载机器人模型
参看src3/mbot_gazebo/launch/view_mbot_gazebo_empty_world.launch
<launch>
<!-- 设置launch文件的参数 -->
<arg name="paused" default="false"/>
<arg name="use_sim_time" default="true"/>
<arg name="gui" default="true"/>
<arg name="headless" default="false"/>
<arg name="debug" default="false"/>
<!-- 运行gazebo仿真环境 -->
<include file="$(find gazebo_ros)/launch/empty_world.launch">
<arg name="debug" value="$(arg debug)" />
<arg name="gui" value="$(arg gui)" />
<arg name="paused" value="$(arg paused)"/>
<arg name="use_sim_time" value="$(arg use_sim_time)"/>
<arg name="headless" value="$(arg headless)"/>
</include>
<!-- 加载机器人模型描述参数 -->
<param name="robot_description" command="$(find xacro)/xacro --inorder '$(find mbot_description)/urdf/xacro/gazebo/mbot_gazebo.xacro'" />
<!-- 运行joint_state_publisher节点,发布机器人的关节状态 -->
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" ></node>
<!-- 运行robot_state_publisher节点,发布tf -->
<node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher" output="screen" >
<param name="publish_frequency" type="double" value="50.0" />
</node>
<!-- 在gazebo中加载机器人模型-->
<node name="urdf_spawner" pkg="gazebo_ros" type="spawn_model" respawn="false" output="screen"
args="-urdf -model mrobot -param robot_description"/>
</launch>
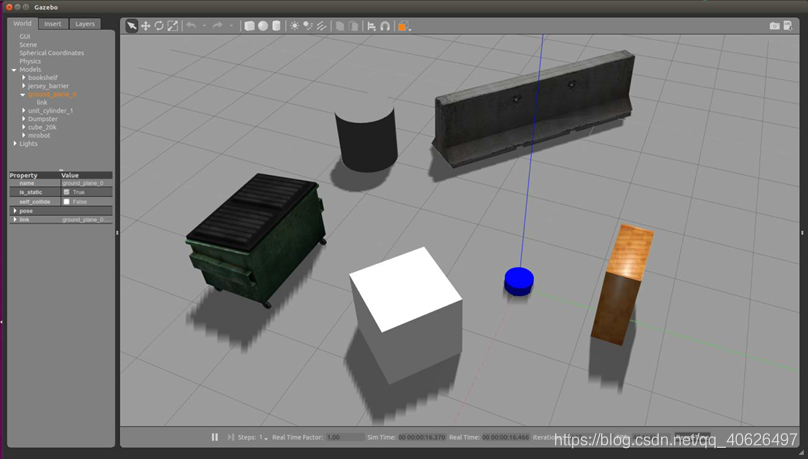
创建仿真环境
空环境中的机器人
运行命令roslaunch mbot_gazebo view_mbot_gazebo_empty_world.launch
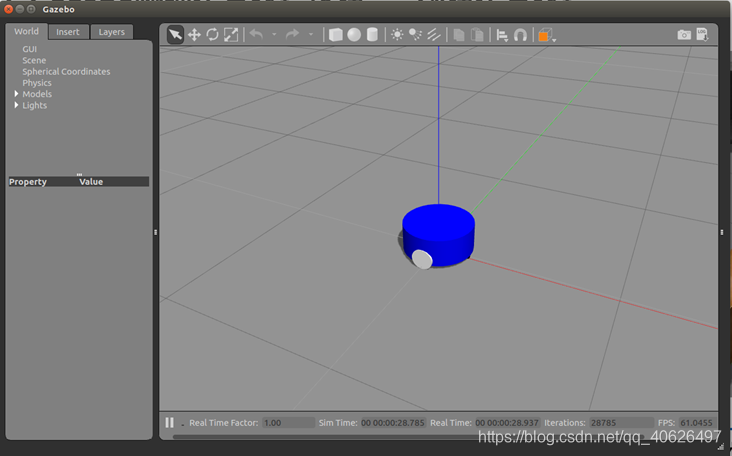
建议:为保证模型顺利加载,请体检将模型文件库下载并放置到~/.gazebo/models
库文件位置:https://bitbucket.org/osrf/gazebo_models/downloads/
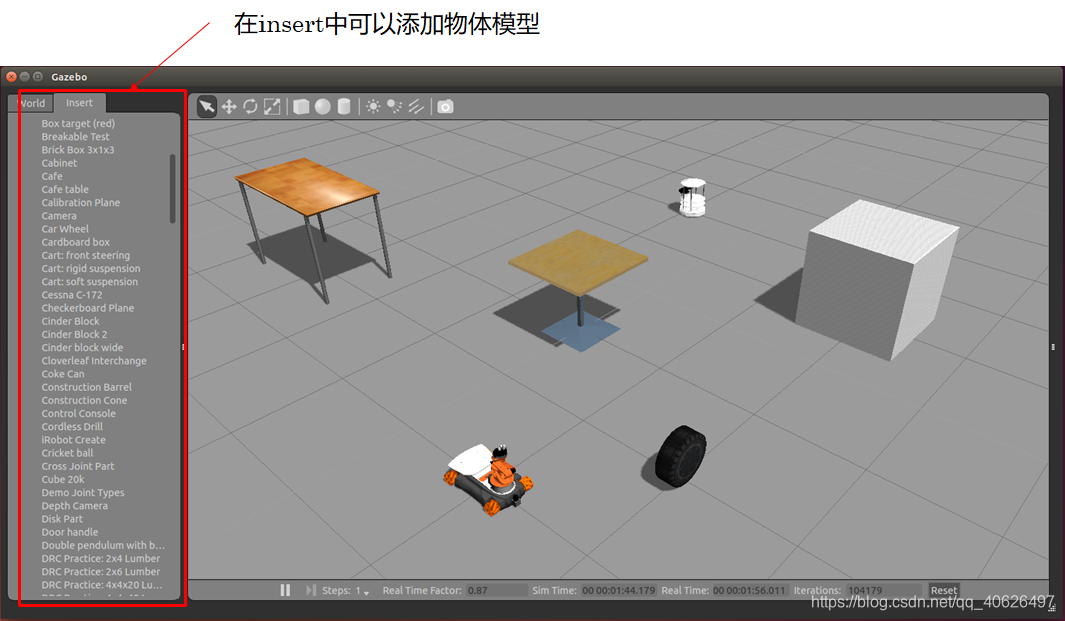
添加物体模型
开始仿真
启动仿真环境 roslaunch mbot_gazebo view_mbot_gazebo_play_ground.launch
启动键盘控制 roslaunch mbot_teleop mbot_teleop.launch
控制键位说明
i:前进,:后退j:左转l:右转k:急停u:前进左转o:前进右转m:后退左转.:后退右转
注意:进行键盘控制时,下面窗口一定要为当前活动窗口

传感器仿真
摄像头仿真
<sensor>标签:描述传感器type:传感器类型:cameraname:摄像头命名,自由设置
<camera>标签:描述摄像头参数- 分辨率
- 编码格式
- 图像范围
- 噪音参数
- 等等…
<plugin>标签:加载摄像头仿真插件libgazebo_ros_camera.so- 设置插件的命名空间
- 发布图像的话题
- 参考坐标系
关于相机的描述位置:src3/mbot_description/urdf/xacro/sensors/camera_gazebo.xacro
<?xml version="1.0"?>
<robot xmlns:xacro="http://www.ros.org/wiki/xacro" name="camera">
<xacro:macro name="usb_camera" params="prefix:=camera">
<!-- Create laser reference frame -->
<link name="${prefix}_link">
<inertial>
<mass value="0.1" />
<origin xyz="0 0 0" />
<inertia ixx="0.01" ixy="0.0" ixz="0.0"
iyy="0.01" iyz="0.0"
izz="0.01" />
</inertial>
<visual>
<origin xyz=" 0 0 0 " rpy="0 0 0" />
<geometry>
<box size="0.01 0.04 0.04" />
</geometry>
<material name="black"/>
</visual>
<collision>
<origin xyz="0.0 0.0 0.0" rpy="0 0 0" />
<geometry>
<box size="0.01 0.04 0.04" />
</geometry>
</collision>
</link>
<gazebo reference="${prefix}_link">
<material>Gazebo/Black</material>
</gazebo>
<gazebo reference="${prefix}_link">
<sensor type="camera" name="camera_node">
<update_rate>30.0</update_rate>
<camera name="head">
<horizontal_fov>1.3962634</horizontal_fov>
<image>
<width>1280</width>
<height>720</height>
<format>R8G8B8</format>
</image>
<clip>
<near>0.02</near>
<far>300</far>
</clip>
<noise>
<type>gaussian</type>
<mean>0.0</mean>
<stddev>0.007</stddev>
</noise>
</camera>
<plugin name="gazebo_camera" filename="libgazebo_ros_camera.so">
<alwaysOn>true</alwaysOn>
<updateRate>0.0</updateRate>
<cameraName>/camera</cameraName>
<imageTopicName>image_raw</imageTopicName>
<cameraInfoTopicName>camera_info</cameraInfoTopicName>
<frameName>camera_link</frameName>
<hackBaseline>0.07</hackBaseline>
<distortionK1>0.0</distortionK1>
<distortionK2>0.0</distortionK2>
<distortionK3>0.0</distortionK3>
<distortionT1>0.0</distortionT1>
<distortionT2>0.0</distortionT2>
</plugin>
</sensor>
</gazebo>
</xacro:macro>
</robot>
启动仿真环境:roslaunch mbot_gazebo view_mbot_with_camera_gazebo.launch

查看摄像头仿真图像 rqt_image_view

RGB-D摄像头仿真(kinect)
关于kinect相机的描述文件位置:src3/mbot_description/urdf/xacro/sensors/kinect_gazebo.xacro
<?xml version="1.0"?>
<robot xmlns:xacro="http://www.ros.org/wiki/xacro" name="kinect_camera">
<xacro:macro name="kinect_camera" params="prefix:=camera">
<!-- Create kinect reference frame -->
<!-- Add mesh for kinect -->
<link name="${prefix}_link">
<origin xyz="0 0 0" rpy="0 0 0"/>
<visual>
<origin xyz="0 0 0" rpy="0 0 ${M_PI/2}"/>
<geometry>
<mesh filename="package://mbot_description/meshes/kinect.dae" />
</geometry>
</visual>
<collision>
<geometry>
<box size="0.07 0.3 0.09"/>
</geometry>
</collision>
</link>
<joint name="${prefix}_optical_joint" type="fixed">
<origin xyz="0 0 0" rpy="-1.5708 0 -1.5708"/>
<parent link="${prefix}_link"/>
<child link="${prefix}_frame_optical"/>
</joint>
<link name="${prefix}_frame_optical"/>
<gazebo reference="${prefix}_link">
<sensor type="depth" name="${prefix}">
<always_on>true</always_on>
<update_rate>20.0</update_rate>
<camera>
<horizontal_fov>${60.0*M_PI/180.0}</horizontal_fov>
<image>
<format>R8G8B8</format>
<width>640</width>
<height>480</height>
</image>
<clip>
<near>0.05</near>
<far>8.0</far>
</clip>
</camera>
<plugin name="kinect_${prefix}_controller" filename="libgazebo_ros_openni_kinect.so">
<cameraName>${prefix}</cameraName>
<alwaysOn>true</alwaysOn>
<updateRate>10</updateRate>
<imageTopicName>rgb/image_raw</imageTopicName>
<depthImageTopicName>depth/image_raw</depthImageTopicName>
<pointCloudTopicName>depth/points</pointCloudTopicName>
<cameraInfoTopicName>rgb/camera_info</cameraInfoTopicName>
<depthImageCameraInfoTopicName>depth/camera_info</depthImageCameraInfoTopicName>
<frameName>${prefix}_frame_optical</frameName>
<baseline>0.1</baseline>
<distortion_k1>0.0</distortion_k1>
<distortion_k2>0.0</distortion_k2>
<distortion_k3>0.0</distortion_k3>
<distortion_t1>0.0</distortion_t1>
<distortion_t2>0.0</distortion_t2>
<pointCloudCutoff>0.4</pointCloudCutoff>
</plugin>
</sensor>
</gazebo>
</xacro:macro>
</robot>
启动仿真环境:roslaunch mbot_gazebo view_mbot_with_kinect_gazebo.launch
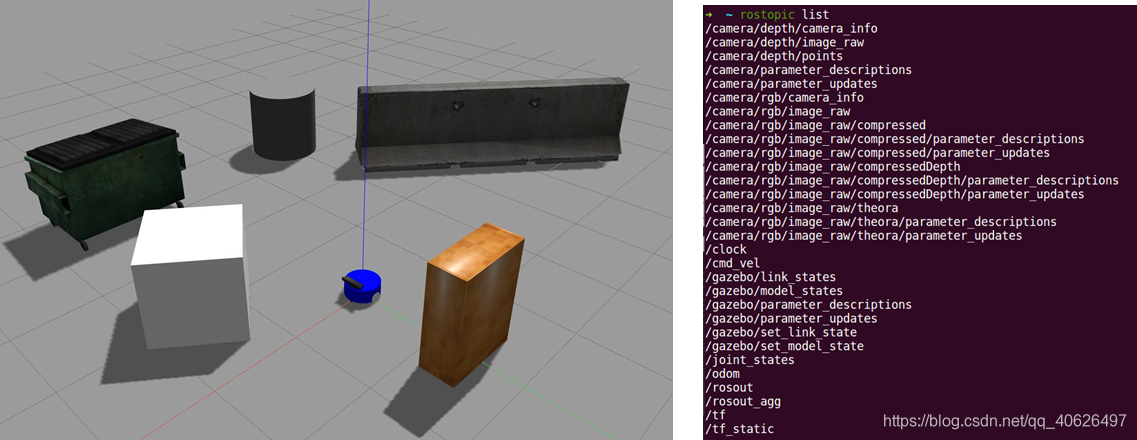
输入命令:rviz
将Fixed Frame选为kinect_link
用add添加:pointCloud2消息

激光雷达仿真
关于激光雷达的描述文件位置:src3/mbot_description/urdf/xacro/sensors/lidar_gazebo.xacro
<?xml version="1.0"?>
<robot xmlns:xacro="http://www.ros.org/wiki/xacro" name="laser">
<xacro:macro name="rplidar" params="prefix:=laser">
<!-- Create laser reference frame -->
<link name="${prefix}_link">
<inertial>
<mass value="0.1" />
<origin xyz="0 0 0" />
<inertia ixx="0.01" ixy="0.0" ixz="0.0"
iyy="0.01" iyz="0.0"
izz="0.01" />
</inertial>
<visual>
<origin xyz=" 0 0 0 " rpy="0 0 0" />
<geometry>
<cylinder length="0.05" radius="0.05"/>
</geometry>
<material name="black"/>
</visual>
<collision>
<origin xyz="0.0 0.0 0.0" rpy="0 0 0" />
<geometry>
<cylinder length="0.06" radius="0.05"/>
</geometry>
</collision>
</link>
<gazebo reference="${prefix}_link">
<material>Gazebo/Black</material>
</gazebo>
<gazebo reference="${prefix}_link">
<sensor type="ray" name="rplidar">
<pose>0 0 0 0 0 0</pose>
<visualize>false</visualize>
<update_rate>5.5</update_rate>
<ray>
<scan>
<horizontal>
<samples>360</samples>
<resolution>1</resolution>
<min_angle>-3</min_angle>
<max_angle>3</max_angle>
</horizontal>
</scan>
<range>
<min>0.10</min>
<max>6.0</max>
<resolution>0.01</resolution>
</range>
<noise>
<type>gaussian</type>
<mean>0.0</mean>
<stddev>0.01</stddev>
</noise>
</ray>
<plugin name="gazebo_rplidar" filename="libgazebo_ros_laser.so">
<topicName>/scan</topicName>
<frameName>laser_link</frameName>
</plugin>
</sensor>
</gazebo>
</xacro:macro>
</robot>
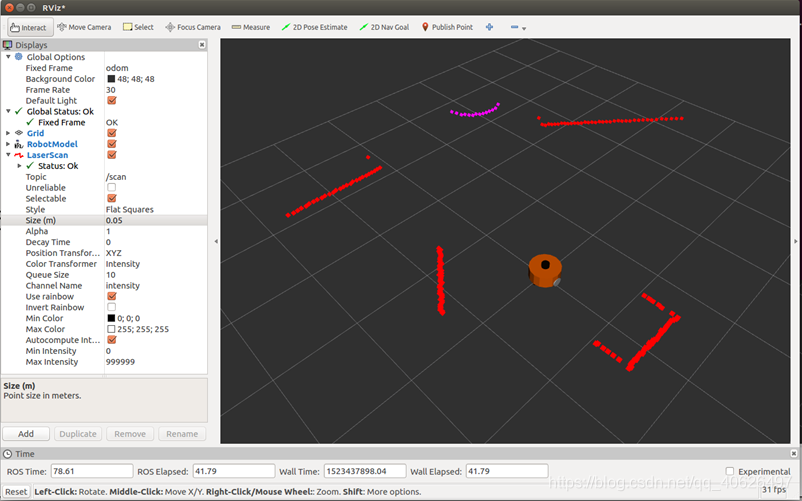
启动仿真环境:roslaunch mbot_gazebo view_mbot_with_laser_gazebo.launch
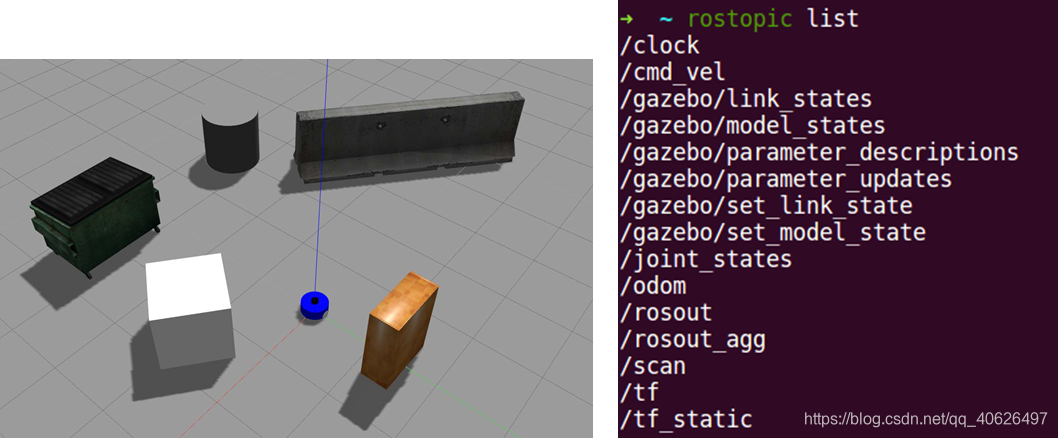
在rviz中查看激光雷达信息