PID控制:
数字 PID 控制算法通常分为位置式 PID 控制算法和增量式 PID 控制算法。

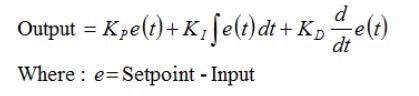
1) 位置式:

2) 增量式:
由u(k)的表达式可以推出u(k)-u(k-1)

即通过pid控制模块得到的时u(k)-u(k-1)的delta值,又,在实际控制中,上一次tick循环的控制量u(k-1)时已经知道了的,所以本次tick将delta+u(k-1)作为最终控制量。
Blog:
https://blog.csdn.net/as480133937/article/details/89508034
A really fantastic serie of blog!!!!
http://brettbeauregard.com/blog/2011/04/improving-the-beginners-pid-introduction/
用过的一个简单pid class,baidu netdisk: