用ROS写一个简单的节点,名为simple_mover。正如它的名字一样,该节点只有一项任务,命令simple_arm的关节运动。
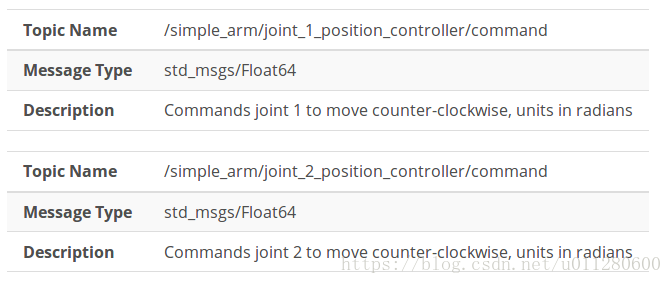
为了完成该项任务,节点必须发布关节角消息到以下话题中:
添加脚本目录scripts
cd ~/catkin_ws/src/simple_arm/
mkdir scripts
创建一个新的脚本
一旦scripts目录创建好了,就可以向包中添加可执行脚本。但是,为了让rosrun找到scripts目录下的脚本,脚本的权限必须改为允许执行。
举个例子:添加一个简单的脚本,在控制台打印”Hello World”:
cd scripts
echo ‘#!/bin/bash’ >> hello
echo ‘echo Hello World’ >> hello
设置合适的可执行权限,重新编译工作空间,并且source新的环境,就可以运行脚本了:
chmod u+x hello
cd ~/catkin_ws
catkin_make
source devel/setup.bash
rosrun simple_arm hello
创建一个空的simple_mover节点脚本
cd ~/catkin_ws/src/simple_arm
cd scripts
touch simple_mover
chmod u+x simple_mover