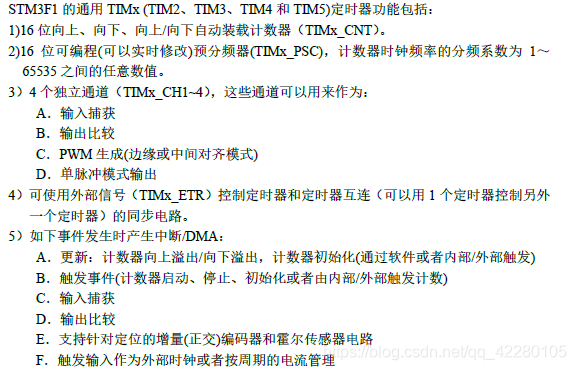
TIM通用计时器介绍
TIM配置
void TIM_Config(uint16_t Channel2Pulse, uint16_t Channel3Pulse)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
/* TIM2 clock enable */
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
/* Time base configuration */
TIM_TimeBaseStructure.TIM_Period = a; //设置自动重装载寄存器的值
TIM_TimeBaseStructure.TIM_Prescaler = b; //设置时钟频率除数的预分频值
TIM_TimeBaseStructure.TIM_ClockDivision = 0;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure);
//TIM2预分频设置:1MHZ,APB1分频系数2,输入到TIM3时钟为36MHzx2 = 72MHz
TIM_PrescalerConfig(TIM2,71, TIM_PSCReloadMode_Immediate);
void NVIC_Configuration(void)
{
NVIC_InitTypeDef NVIC_InitStructure;
/* Enable the TIM2 global Interrupt */
NVIC_InitStructure.NVIC_IRQChannel = TIM3_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
}
注意:
- 通用定时器是TIM2-5,基本定时器TIM6-7,高级定时器TIM1和TIM8。
- TIM1和8在APB2,TIM2-7在APB1。
- T(时间)=((a+1)*(b+1))/T(TIM时钟频率)
PWM
void TIM_Config(uint16_t Channel2Pulse, uint16_t Channel3Pulse)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
/* TIM2 clock enable */
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
/* Time base configuration */
TIM_TimeBaseStructure.TIM_Period = 999; //1KHz
TIM_TimeBaseStructure.TIM_Prescaler = 0;
TIM_TimeBaseStructure.TIM_ClockDivision = 0;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure);
//TIM2预分频设置:1MHZ,APB1分频系数2,输入到TIM3时钟为36MHzx2 = 72MHz
TIM_PrescalerConfig(TIM2,71, TIM_PSCReloadMode_Immediate);
/* Channel 2 and 3 Configuration in PWM mode */
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
// TIM_OCInitStructure.TIM_OutputNState = TIM_OutputNState_Enable;
TIM_OCInitStructure.TIM_Pulse = Channel2Pulse;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_Low;
// TIM_OCInitStructure.TIM_OCNPolarity = TIM_OCNPolarity_High;
// TIM_OCInitStructure.TIM_OCIdleState = TIM_OCIdleState_Set;
// TIM_OCInitStructure.TIM_OCNIdleState = TIM_OCIdleState_Reset;
TIM_OC2Init(TIM2, &TIM_OCInitStructure);
TIM_OCInitStructure.TIM_Pulse = Channel3Pulse;
TIM_OC3Init(TIM2, &TIM_OCInitStructure);
//使能TIM2定时计数器
TIM_Cmd(TIM2, ENABLE);
//使能TIM2 PWM输出模式
TIM_CtrlPWMOutputs(TIM2, ENABLE);
}
void PWM_IO_Config(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1 | GPIO_Pin_2;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
}
