第二章 2腿式机器人运动学模型及分析
2.腿式机器人运动学模型及分析总述
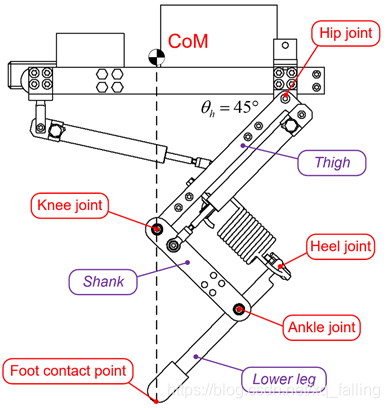
对于单足或双足弹跳机器人来说,只存在一种步态:walking=hopping
2.1腿式机器人运动模型
2.1.1研究弹跳运动的价值:
- 更好地理解腿式运动的机理
- 更容易向多足机器人平台扩展
- 使运动控制器更加合理,高效。
2.1.2腿式机器人的运作状态
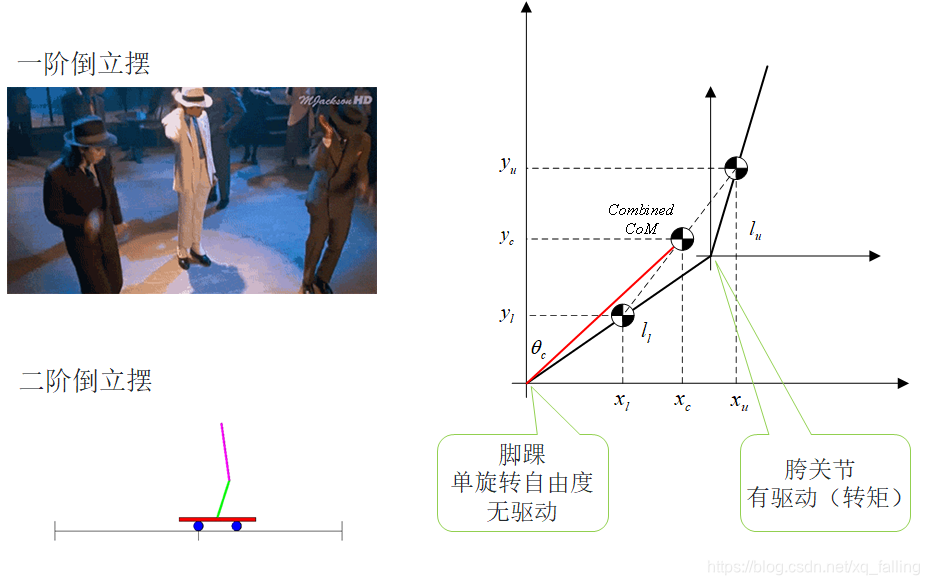
决定双足仿人型机器人能否实现站姿平衡的核心条件:足底面积的大小

2.1.2.1立姿
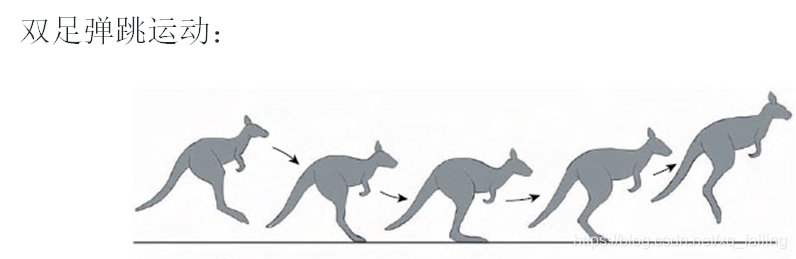
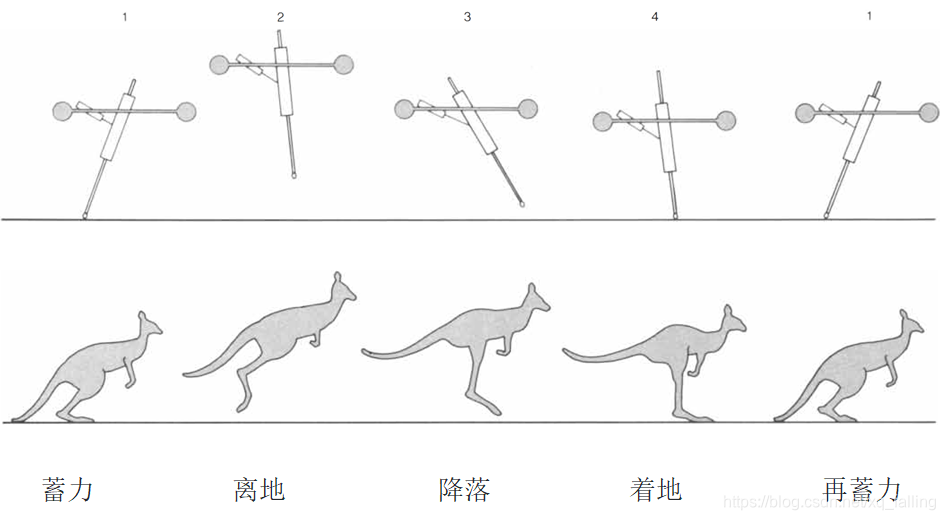
2.1.2.2弹跳
2.2腿式机器人运动分析
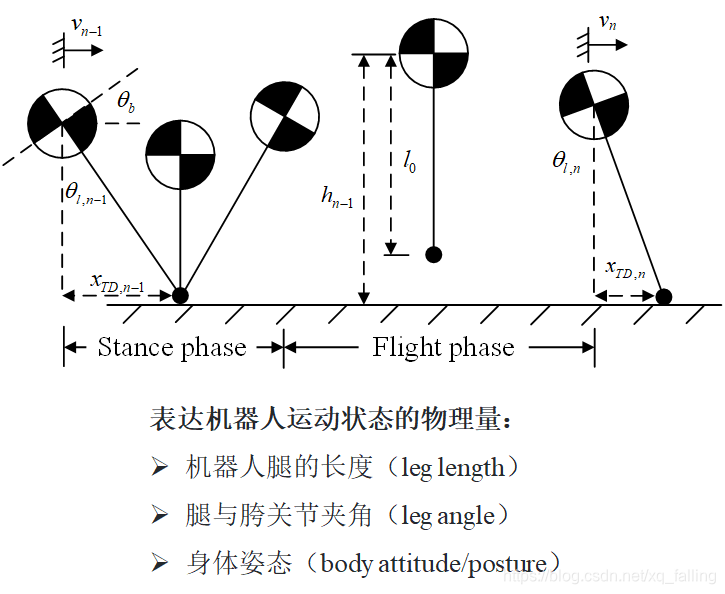
围绕腿式机器人腿的长度,腿与胯关节夹角(leg angle),腿式机器人身体姿态(body attitude/posture),三个表达机器人运动状态的物理量展开运动控制,即可以得到:Three-part Control Algorithm
2.2.1腿式机器人腿的长度
2.2.1.1腿部结构总类
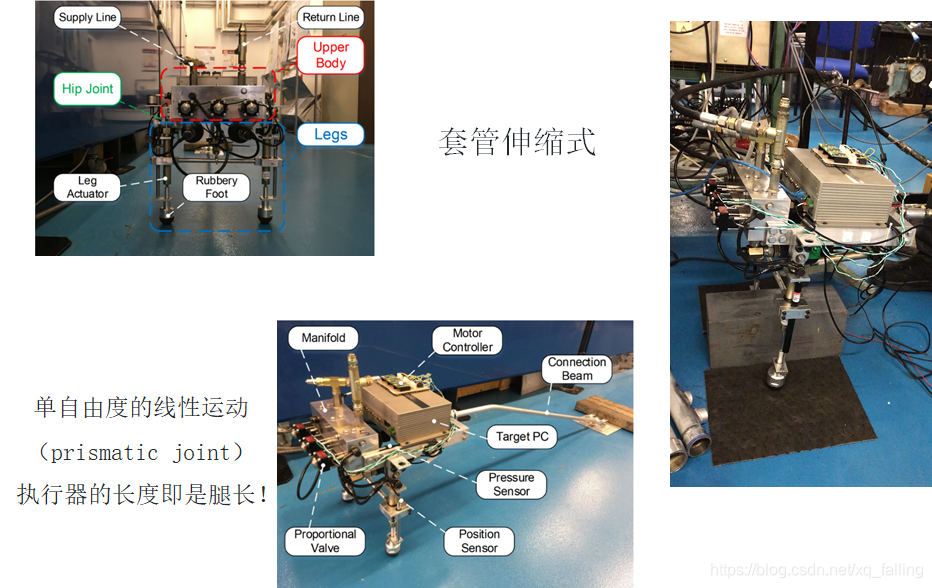
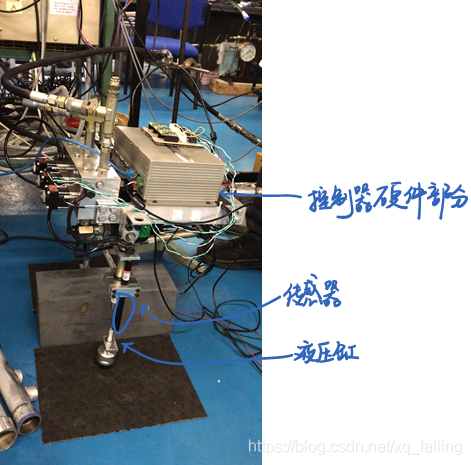
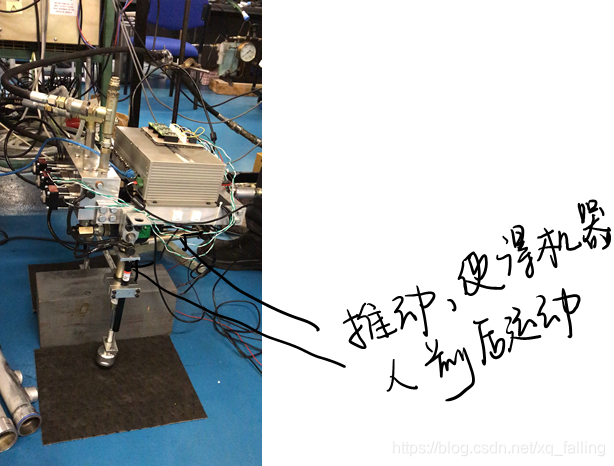
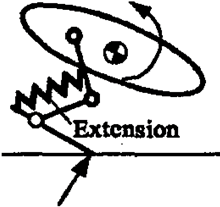
2.2.1.1.1套管伸缩式
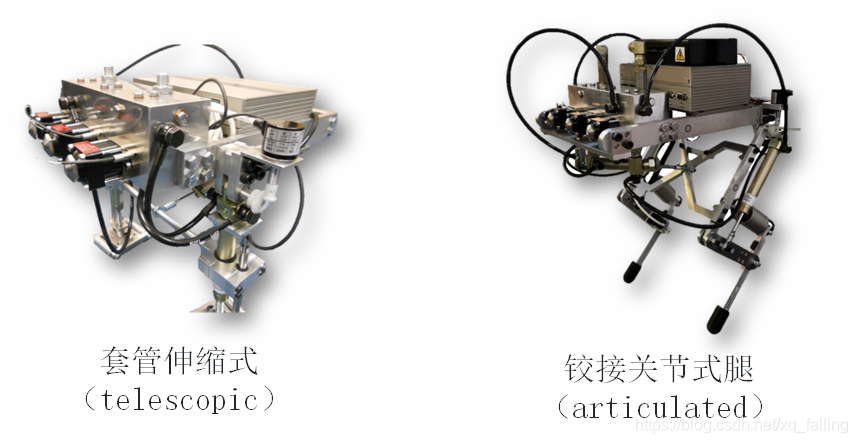
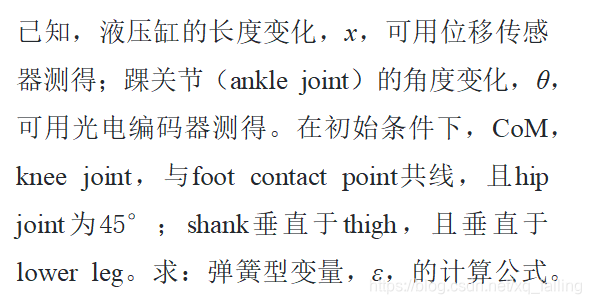
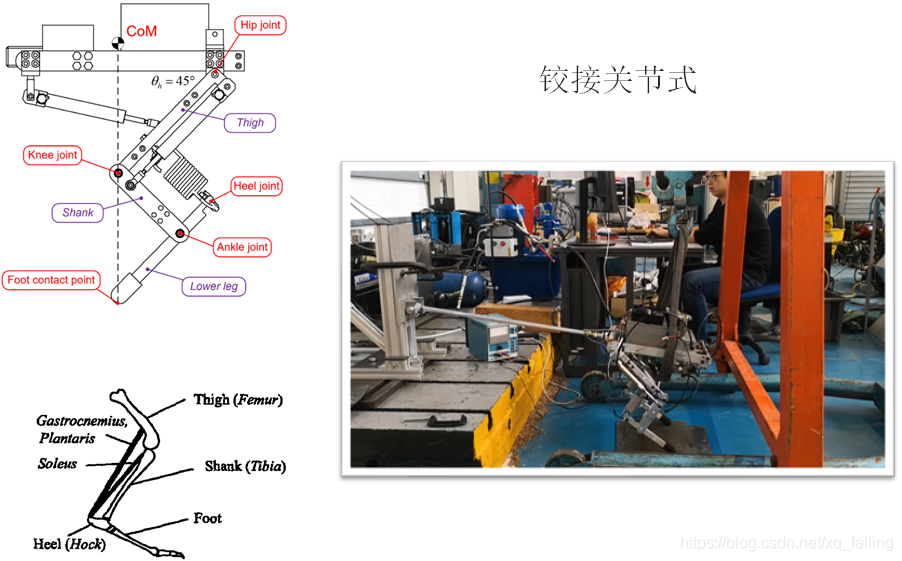
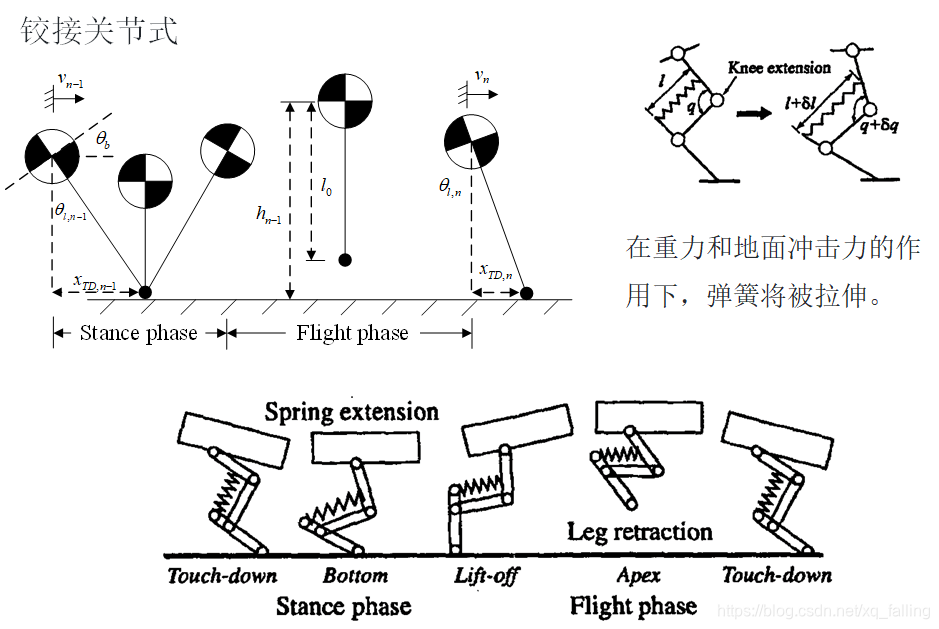
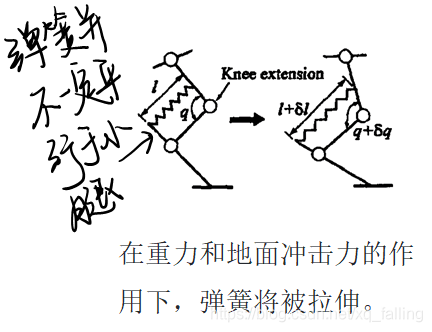
2.2.1.1.2铰接关节式腿
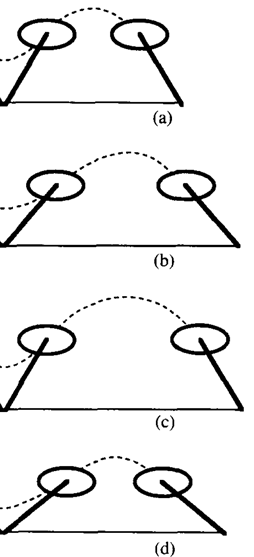
2.2.2腿式机器人腿与胯关节夹角(leg angle)
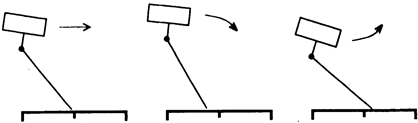
- 在腾空阶段中,对胯关节施加不同大小的转矩,可以有效调节腿与胯关节之间的夹角,从而改变下一次着地点的位置。
- 同时,身体的姿态也会在腾空阶段中发生改变,前倾或后仰(角动量守恒,例:直升机)。
- 为保持平衡,需要在下一次着地阶段中,对机器人的身体姿态,进行调整。
2.2.3腿式机器人身体姿态(body attitude/posture)
- 对应不同的着地点,身体姿态会发生不同的运动倾向。
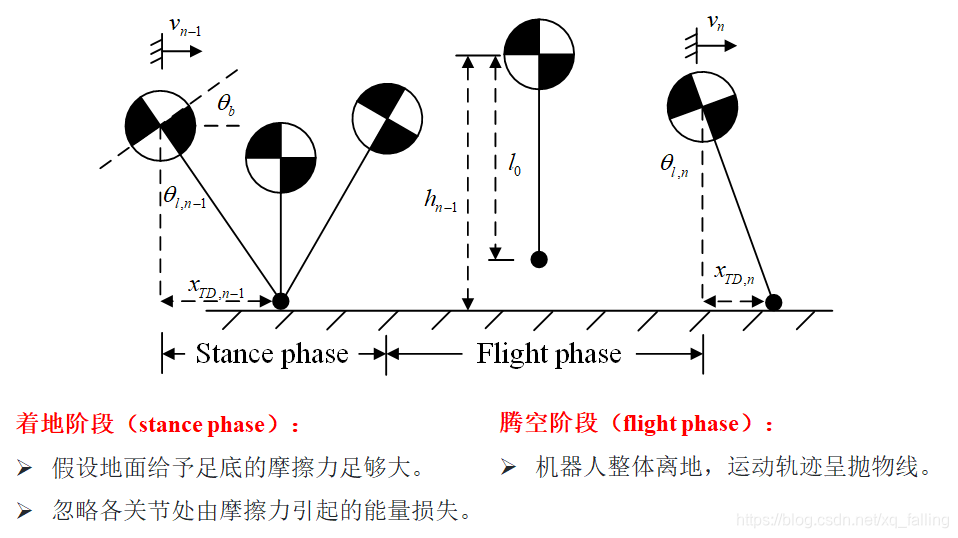
- 假设,地面给予的摩擦力足够大,即机器人脚底不打滑。
- 在胯关节施加一个与身体运动趋势相反的力矩,可以让躯干重新回到平衡位置。
思考题: