文章目录
根据处理的目的,可以将用部预处理方法分为两组。
- 平滑(smoothing) 目的在于抑制噪声或其他小的波动,这等同于在傅里叶变换域抑制高频部分。不幸的是平滑也会模糊所有的含有图像重要信息的明显边缘。
- 梯度算子(gradient operators) 基于图像函数的局部导数。导数在阁像函数快速变化的位直处较大,梯 度算子的目的是在图像中显现这些位置。梯度算子在傅里叶变换域有抑制低频部分的类似效应。
噪声在本质上通常是高频的,不幸的是如果在图像中使用梯度算子,也会同时抬高噪声水平。显然,平滑和梯度算子具干i相互抵触的目标。有些预处理算法解决了这个问题,使得可以同时达到平滑和边缘增强的目的。
另一种局部预处理的分类方法是基于变换的性质,区分为线性和非线性变换。
图像平滑
图像平滑利用图像数据的冗余性来抑制图像噪声,通常依赖于某种对某个邻域。中的亮度数值求平均的形式。平滑有造成明显边缘变得模糊的问题,因此我们将在这里考虑能够保持边缘(edge preserving)的平滑方法,即仅使用邻域中与被处理的点有相似性质的点作平均。

在限制数据有效性下的平均(averaging with limited data validity)
在限制数据有效性下的平均方法[McDonnell,1981]试图仅使用满足某种标准的那些像素作平均来避免模糊,它的目的是避免涉及属于其他特征的像素。

根据反梯度平均(averagingaccording to inverse gradient)
这种方法假设边缘是显著的。当卷积掩膜靠近边缘时,区域中的像素比靠近边缘的像素有较大的系数,因此不会模糊。在均匀区域中的孤立噪声点具有小的反梯度值,邻域中的点参加平均因而噪声就被消除了。
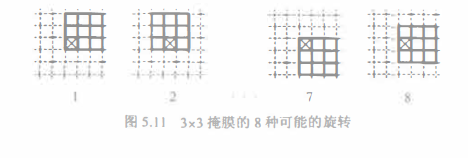
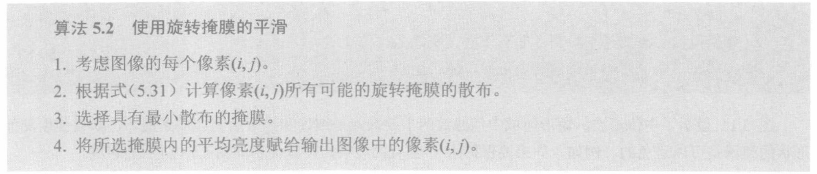
使用旋转掩膜的平均(averaging using a rotating mask)
中值滤波(median filtering)


非线性均值滤波(non-linear mean ftlter)
边缘检测算子
边缘检测算子(edge detectors) 是组用于在亮度函数中定位变化的非常重要的局部图像预处理方法, 边缘是亮度函数发生急剧变化的位置。

图像锐化(sharpening)[Rosenfeld and Kak, 1982) 的目标是使边缘更陡峭,锐化的图像是供人观察的。
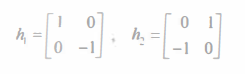
Roberts算子
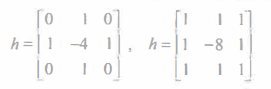
Laplace算子
Prewitt算子

Sobel算子

Kirsch算子

二阶导数过零点
Marr理论根据神经生理学实验得出了以下结论: 物体的边界是将亮度图像与其解释连接起来的最重要的线索。
基于二阶导数过零点的边缘检测技术,探究了阶跃边缘对应于图像函数陡哨的变化这一事实。图像函数的一阶导数在对应于图像边缘的位置上应该取得极值,因此二阶导数在同一位置应该为 0;而寻找过零点位置比起极值来得更容易和更精确。
图像处理中的尺度
许多图像处理技术是在局部,理论上是在单个像素的层次上起作用,边缘检测方法就是一个例子。
在数字图像领域,不同的描述层次可以简单地解释为不同的尺度。尺度思想是Marr边缘检测技术的基础,其中不同尺度是由不同大小的高斯滤波器掩膜形成的。
- 第一种方法[Lowe,1989)旨在根据一定的尺度范围处理平面t受噪声影响的曲线,寻找反映场景结构的曲线片段。
- 第二个方法成为尺度空间滤波,试图相对于尺度来定性地描述信号。
- 第三个应用尺度的例子是人们熟知的Canny边缘检测。
Canny边缘提取
Canny提出了一种新的边缘检测方法[Canny、1986),它对受白噪声影响的阶跃型边缘是最忧的Canny 检测的最优性与以下的三个标准有关:
- 检测标准:不丢失重要的边缘,不应有虚假的边缘
- 定位标准:实际边缘与检测到的边缘位置之间的偏差最小。
- 单响应标准:将多个响应降低为单个边缘响应

参数化边缘模型
参数化模型是基于如下思想,即离散图像亮度凶数可以看作是对连续统分段连续的图像亮度的数的采样的有噪声的近似。
棋子参数模型的边缘检测子对边缘的描述比基于卷积的边缘检测子更精确。此外,它们还具有进行亚像 素级边缘定位的潜力。
多光谱图像中的边缘
在多光谱图像中,一个像素由一个n维向量来表示,n个光谱频段的亮度值是向量的分量。
分别检测单光谱阁像分量的边缘。可以将各个边缘图像结合起来得到结果图像,其边缘的强度和方向使用从各个光谱边缘分量中筛选或者对它们线性组合来代替。
频域的局部预处理
里叶变换使两幅图像在频域内的卷积变得很容易,很自然地就需要考虑在频域中应用许多卷积。这种操作通常被称作空间频率滤波。
最常见的图像增强问题包括噪声抑制、边缘增强和去噪,这些都能在频域内完成。噪声一般是图像中的高频部分,可用低通滤波器来抑制它,不幸的是,所有的高频部分都被抑制了,包括和噪声无关的高频部分(比如清晰的边缘、线段等)。低通滤波导致图像变模糊。
另一方面,边缘也代表了图像中的高频部分。所以,为了增强边缘,对图像频谱中低频成分必须加以抑制,高频滤波器的作用正式这样。
为了移除频域内的噪声,设计滤波器时,需有噪声特性的先验知识。先验可通过图像数据或者受损图像的傅里叶频谱分析得到。在频谱中,噪声往往会引起频谱的突变尖峰。
对于频率滤波,有几种滤波器很有用:其中两个重要代表为高斯滤波器和巴特沃斯滤波器。

用局部预处理算子做线检测
另一类操作则是在图像中寻找 “兴趣点”( interest points) 或 “兴趣域”( locations of interest)。
线寻找操作( Line finding operators) 的目标是,寻找图像中的很细的线:线检测在遥感和文档处理中很常用
边缘的局部信息是某类图像分割技术的基础,通过给边缘大小设定一个阈值,我们可以检测出从属于物体边界的边缘。
角点(兴趣点)检测

图像复原
我们称旨在抑制返化而利用有关退化性质知识的预处理方法为图像复原Cimage restoration)。 多数图像 复原方法是基于整幅图像上的全局性卷积方法。
图像的退化可能有多种原因:光学透镜的残次、光电传感器的非线性、胶片材料的颗粒度、物体与摄像 机间的相对运动、不当的聚焦、遥感或天文中太气的扰动、照片的扫描,等等。图像复原的目标是从返化图 像中重建出原始图像。
图像复原技术可以划分为确定性的(deterministic) 和随机性的(stochastic)。
容易复原的退化
- 摄像机和物体的相对运动C relative motion of camera and object)
- 不当的镜头焦距(wrong lens focus)
- 大气的扰动(atmospheric turbulence)
总结
- 图像预处理
- 最低抽象层次图像卡的操作,被称为“预处理”。输入和输出都是亮度图像。
- 顶处理的目的是抑制不想要的变形或者增强某些对于后续处理重要的图像特征。
- 预处理方法分为四类:
- 像素亮度变化
- 几何变换
- 局部邻域预处理
- 图像复原