用GPIOB_31模拟按键功能,设置上拉,下降沿触发
寄存器版本
linux驱动几乎不用管硬件中断了,内核已经帮我们管理好了所有硬件中断号,并且定义了相应的内核中断号,我们只需要看一下内核中断号。
arch/arm/mach-s5p4418/include/mach/s5paa18_irq.h
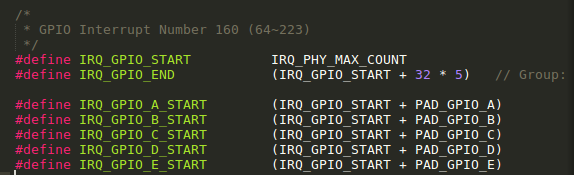
这里GPIOB_31直接用IRQ_GPIO_B_START + 31就好。

数据手册中得到下降沿触发值为0b010=2。有关GPIO寄存器的定义和操作可以见这篇文章:【linux驱动】GPIO
#include <linux/init.h>
#include <linux/module.h>
#include <linux/kernel.h>
#include <linux/interrupt.h> //含有request_irq、free_irq函数
#include <linux/irq.h> //含有IRQ_HANDLED\IRQ_TYPE_EDGE_RISING
#include <linux/fs.h>
#include <linux/cdev.h>
#include <asm/io.h>
#include <mach/soc.h>
#include <mach/platform.h>
MODULE_LICENSE("GPL");
#pragma pack(4)
static struct GPIO_B{
unsigned int out_put;
unsigned int out_enb;
unsigned int detect_md_0;
unsigned int detect_md_1;
unsigned int int_enb;
unsigned int event_detect;
unsigned int pad_state;
unsigned int resv;
unsigned int func0;
unsigned int func1;
unsigned int DETMODEEX;
unsigned int DETENB;
unsigned int SLEW;
unsigned int SLEW_DISABLE_DEFAULT;
unsigned int DRV1;
unsigned int DRV1_DISABLE_DEFAULT;
unsigned int DRV0;
unsigned int DRV0_DISABLE_DEFAULT;
unsigned int pull_sell;
unsigned int PULLSEL_DISABLE_DEFAULT;
unsigned int pull_enb;
}* gpio_b;
#pragma pack()
dev_t devid;
unsigned int int_num,gpio_b_31_int_num;
static irqreturn_t hello_irq(int irq,void * dev_id)
{
printk("gpiob_31 down,MAJOR:%d MINOR:%d\n",MAJOR((dev_t)dev_id),MINOR((dev_t)dev_id));
return IRQ_HANDLED;
}
static int __init hello_init(void){
int ret = 0;
devid = MKDEV(241, 1); //换算设备号
ret = register_chrdev_region(devid, 1, "char_test");//注册设备,在/proc/drivers下面可以看到
if (ret < 0)
goto err0;
gpio_b = (struct GPIO_B *)ioremap(0xc001b000,sizeof(struct GPIO_B));//映射地址
gpio_b->func1 |= (1 << 30); //设置gpio功能
gpio_b->out_enb &= ~(1 << 31); //禁用输出
gpio_b->pull_enb |= (1 << 31); //使能上下拉
gpio_b->pull_sell |= (1 << 31); //设置为上拉
gpio_b->int_enb |= (1 << 31); //中断使能
gpio_b->detect_md_1 |= (2 << 30); //中断模式为下降沿触发
gpio_b_31_int_num = IRQ_GPIO_B_START + 31;
if (!request_irq(gpio_b_31_int_num,hello_irq,IRQF_DISABLED | IRQF_SHARED,"gpio_irq0",(void *)devid)){
printk("irq registed:%d\n", gpio_b_31_int_num);
int_num = gpio_b_31_int_num;
}else{
printk("irq regist fail:%d\n",gpio_b_31_int_num);
}
printk("hello init\n");
return 0;
err0:
return ret;
}
static void __exit hello_exit(void){
if(int_num){
free_irq(gpio_b_31_int_num,(void *)devid); //取消中断函数注册
}
unregister_chrdev_region(devid, 1);
gpio_b->int_enb &= ~(1 << 31); //禁用中断
printk("hello exit\n");
}
module_init(hello_init);
module_exit(hello_exit);
API版本
api版本需要看一下中断模式的设置,从注释看出来下降沿触发依然是2。
arch/arm/mach-s5p4418/soc/gpio.c

#include <linux/init.h>
#include <linux/module.h>
#include <linux/kernel.h>
#include <linux/interrupt.h> //含有request_irq、free_irq函数
#include <linux/irq.h> //含有IRQ_HANDLED\IRQ_TYPE_EDGE_RISING
#include <linux/fs.h>
#include <linux/cdev.h>
#include <asm/io.h>
#include <mach/soc.h>
#include <mach/platform.h>
MODULE_LICENSE("GPL");
dev_t devid;
unsigned int int_num,gpio_b_31_int_num;
static irqreturn_t hello_irq(int irq,void * dev_id)
{
printk("gpiob_31 down,MAJOR:%d MINOR:%d\n",MAJOR((dev_t)dev_id),MINOR((dev_t)dev_id));
return IRQ_HANDLED;
}
static int __init hello_init(void){
int ret = 0;
devid = MKDEV(241, 1); //换算设备号
ret = register_chrdev_region(devid, 1, "char_test");//注册设备,在/proc/drivers下面可以看到
if (ret < 0)
goto err0;
nxp_soc_gpio_set_io_func(PAD_GPIO_B + 31, 1); //设置gpio功能
nxp_soc_gpio_set_io_pull_enb(PAD_GPIO_B + 31, 1); //使能上下拉
nxp_soc_gpio_set_io_pull_sel(PAD_GPIO_B + 31, 1); //设置为上拉
nxp_soc_gpio_set_int_enable(PAD_GPIO_B + 31, 1); //中断使能
nxp_soc_gpio_set_int_mode(PAD_GPIO_B + 31, 2); //中断模式为下降沿触发
gpio_b_31_int_num = IRQ_GPIO_B_START + 31;
if (!request_irq(gpio_b_31_int_num,hello_irq,IRQF_DISABLED | IRQF_SHARED,"gpio_irq0",(void *)devid)){
printk("irq registed:%d\n", gpio_b_31_int_num);
int_num = gpio_b_31_int_num;
}else{
printk("irq regist fail:%d\n",gpio_b_31_int_num);
}
printk("hello init\n");
return 0;
err0:
return ret;
}
static void __exit hello_exit(void){
if(int_num){
free_irq(gpio_b_31_int_num,(void *)devid); //取消中断函数注册
}
unregister_chrdev_region(devid, 1);
nxp_soc_gpio_set_io_pull_enb(PAD_GPIO_B + 31, 0); //禁用上下拉
nxp_soc_gpio_set_int_enable(PAD_GPIO_B + 31, 0); //禁用中断
printk("hello exit\n");
}
module_init(hello_init);
module_exit(hello_exit);
运行一下
[root@minicoco int_register]# insmod gpiob_31.ko
[ 128.636000] irq registed:127
[ 128.636000] hello init
[root@minicoco int_register]# [ 134.824000] gpiob_31 down,MAJOR:241 MINOR:1
[ 135.240000] gpiob_31 down,MAJOR:241 MINOR:1
[ 136.444000] gpiob_31 down,MAJOR:241 MINOR:1