1. 交换排序
基本思路:两个记录反序时进行交换。
常见的交换排序方法:(1)冒泡排序(2)快速排序。
冒泡排序
基本思想:从后往前(或从前往后)两两比较相邻元素的值,若为逆序,则交换它们,直到序列比较完。在下一趟冒泡时,上一趟确定的最小(或最大)元素不再参与比较,每次冒泡都将无序区中的最小(或最大)元素放在其最终位置。
一旦某趟冒泡过程不进行记录交换,说明已经排好序了,就可以结束本算法。最多进行n-1趟冒泡。
算法分析:最好的情况(关键字在记录中正序),只需要一趟冒泡,比较n-1次,移动0次;最坏的情况(反序),需进行n-1趟冒泡,比较 1 + . . . + n − 1 = n ( n − 1 ) / 2 1+...+n-1=n(n-1)/2 1+...+n−1=n(n−1)/2次,移动 3 ( 1 + . . . + n − 1 ) = 3 n ( n − 1 ) / 2 3(1+...+n-1)=3n(n-1)/2 3(1+...+n−1)=3n(n−1)/2。所以冒泡排序最好的时间复杂度为 O ( n ) O(n) O(n),最坏和平均都是 O ( n 2 ) O(n^2) O(n2)。
空间效率:仅使用了常数个辅助单元,空间复杂度为 O ( 1 ) O(1) O(1)。
稳定性:关键字相等是不进行交换,是一种稳定的排序算法。
void BubbleSort(RecType A[], int n){
//冒泡排序
int i, j;
RecType tmp;
for (i=1; i<n; i++){
//进行n-1趟排序
int flag = 0;//判断本趟是否出现记录交换
for (j=0; j<n-i; j++){
if (A[j].key > A[j+1].key){
//交换
tmp = A[j];
A[j] = A[j+1];
A[j+1] = tmp;
flag = 1;
}
}
if (flag == 0)//本趟不出现记录交换,已经排好序了
break;
}
}
快速排序
基本思想:每次将表的第一个元素放在适当位置(归位),将表一分为二,对子表按递归方式继续这种划分,直至划分的子表的长度为0或1(递归出口)。
空间效率:快速排序是递归的,需要借助一个递归工作栈来保存每层递归调用的必要信息,其容量应与递归调用的最大深度一致。最好情况为 O ( l o g 2 n ) O(log_2n) O(log2n),最坏情况为 O ( n ) O(n) O(n)。
时间效率:快速排序的运行时间与划分是否对称有关。最好情况,每次划分都对称,为 O ( n l o g 2 n ) O(nlog_2n) O(nlog2n),最坏情况,每次划分都是一个区间包含0个元素而另一个区间包含n-1个元素,为 O ( n 2 ) O(n^2) O(n2)。快速排序平均情况下的运行时间接近于最好的情况,是所有内部排序算法中平均性能最优的排序算法。
稳定性:是不稳定的排序算法。若右端区间有两个关键字相同的记录,且均小于基准值的记录,则交换到左区间后,相对位置发生变化。
void QuickSort(RecType A[], int low, int high){
//快速排序
int i = low, j = high;
RecType tmp;
if (low<high){
//至少两个元素
tmp = A[low];//基准
while (i!=j){
while (i<j && A[j].key>=tmp.key) j--;//找小于基准的元素
A[i] = A[j];
while (i<j && A[i].key<=tmp.key) i++;//找大于基准的元素
A[j] = A[i];
}
A[i] = tmp;
QuickSort(A,low,i-1);//对左区间进行递归排序
QuickSort(A,i+1,high);//右区间递归排序
}
//少于一个元素,为递归出口
}
int Partition(vector<int>& arr, int start, int end){
int i = start, j = end;
int tmp = arr[i];
while (i < j){
while (i < j && arr[j] >= tmp) j--;
arr[i] = arr[j];
while (i < j && arr[i] <= tmp) i++;
arr[j] = arr[i];
}
arr[i] = tmp;
return i;
}
void QuickSort(vector<int>& arr, int left, int right){
if (left < right){
int idx = Partition(arr,left,right);
QuickSort(arr,left,idx-1);
QuickSort(arr,idx+1,right);
}
}
2.选择排序
第i趟从L[i,…,n]选择关键字最小的元素,放在L(i)处。
简单选择排序
基本思想:假设排序表为L[1,2,…,n],第i趟排序即从L[i,…,n]中选择关键字最小的元素与L(i)交换,每一趟排序可以确定一个元素的最终位置,这样经过n-1趟排序就可以使整个表有序。
空间效率:仅使用常量个辅助单元,故空间效率为 O ( n ) O(n) O(n).
时间效率:移动记录的次数,最好情况(正序)为0,最坏情况(反序)为 3 ( n − 1 ) 3(n-1) 3(n−1)。关键字的比较次数与序列的初始状态无关,始终为 1 + . . . + ( n − 1 ) = n ( n − 1 ) / 2 1+...+(n-1)=n(n-1)/2 1+...+(n−1)=n(n−1)/2次,时间复杂度始终为 O ( n 2 ) O(n^2) O(n2)。
稳定性:是不稳定的方法。在第i趟找到最小元素后,和第i个元素交换,可能导致第i个元素与其含有相同关键字元素的相对位置发生改变。
void SelectSort(RecType A[], int n){
//简单选择排序
int i, j, min; RecType tmp;
for (i=0; i<n-1; i++){
//共进行n-1趟排序
min = i;
for (j=i+1; j<n; j++){
if (A[j].key<A[min].key)
min = j;//更新最小值的位置
}
if (min != i){
tmp = A[i]; A[i] = A[min]; A[min] = tmp;//交换
}
}
}
堆排序
堆的定义:n个关键字序列 L [ 1... n ] L[1...n] L[1...n]称为堆,当且仅当该序列满足:
(1) L ( i ) > = L ( 2 i ) 且 L ( i ) > = L ( 2 i + 1 ) L(i)>=L(2i)且L(i)>=L(2i+1) L(i)>=L(2i)且L(i)>=L(2i+1)或者
(2)$L(i)<=L(2i)且L(i)<=L(2i+1) $, ( 1 < = i < = ⌊ n / 2 ⌋ ) (1<=i<= \lfloor n/2 \rfloor) (1<=i<=⌊n/2⌋)
满足(1)的称为大根堆,满足(2)的称为小根堆。
可以将该关键字序列视为一棵完全二叉树,大根堆的最大元素存放在根节点,且任一非根节点的值小于等于其双亲节点值。小根堆正好相反。
堆排序的思路:由关键字序列创建初始堆。由堆自身的特点,堆顶元素就是最大值。输出堆顶元素后,通常将堆底元素送入堆顶,此时根节点不满足大根堆的性质,堆被破坏,将堆顶元素向下调整使其继续保持大根堆的性质,再输出堆顶元素。如此充分,直到堆中仅剩一个元素为止。
关键问题:(1)如何将无序序列构建成初始堆;(2)输出堆顶元素后,如何将剩余元素调整成新的堆?
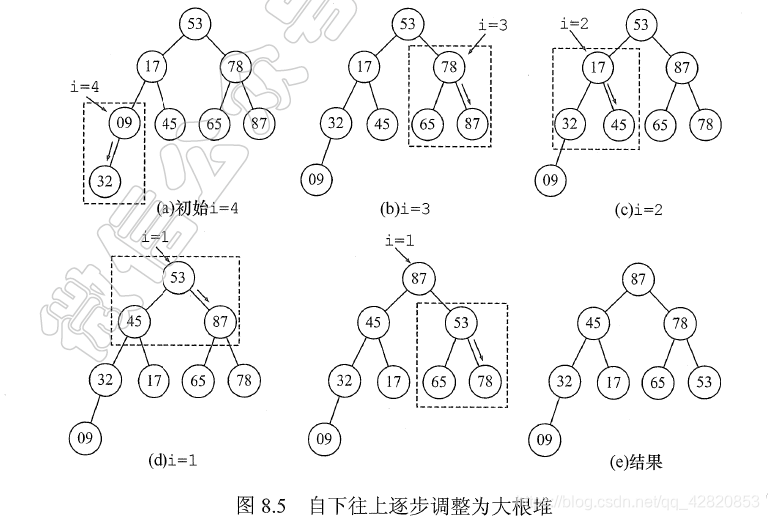
算法设计:构建初始堆:对以第 ⌊ n / 2 ⌋ \lfloor n/2 \rfloor ⌊n/2⌋个节点为根的子树进行筛选(对于大根堆,若根节点的关键字小于左右孩子中关键字的较大者,则交换之),使该子树成堆。之后向前依次对各分支节点( ⌊ n / 2 ⌋ − 1 1 \lfloor n/2 \rfloor-1~1 ⌊n/2⌋−1 1)为根的子树进行筛选,直到根节点。
输出堆顶元素后,将堆的最后一个元素与堆顶元素交换,此时堆的性质被破坏,需要向下进行筛选。

空间效率:仅使用了常数个辅助单元,空间复杂度为 O ( 1 ) O(1) O(1)。
时间效率:建堆时间为 O ( n ) O(n) O(n),在最好、最坏和平均情况下,堆排序的时间复杂度为 O ( n l o g 2 n ) O(nlog_2n) O(nlog2n).
稳定性:是不稳定的算法。
void Sift(RecType A[], int low, int high){
//对以low为根节点子树筛选
int i=low, j=2*i;
RecType tmp = A[i];
while (j<=high){
if (j<high && A[j].key<A[j+1].key) j++;//j指向大孩子
if (tmp.key<A[j].key){
A[i] = A[j];//将A[j]调整到双亲节点的位置上
i = j;//修改i和j的值,以便继续向下筛选
j = 2*i;
}
else break;//双亲大,不用调整
}
A[i] = tmp;
}
void HeapSort(RecType A[], int n){
//堆排序
int i;
RecType tmp;
for (i=n/2; i>=1; i--)//循环建立初始堆
Sift(A,i,n);
for (i=n; i>=2; i--){
//进行n-1次循环,完成堆排序
tmp = A[1];
A[1] = A[i];
A[i] = tmp;
Sift(A,1,i-1);
}
}
void adjust(vector<int> &nums, int i, int n){
int j = 2 * i + 1;
while (j < n){
if (j < n - 1 && nums[j] < nums[j+1])
j++;//j指向两个子节点中较大的
if (nums[i] < nums[j]){
int tmp = nums[i];
nums[i] = nums[j];
nums[j] = tmp;
i = j;//继续向下调整
j = 2*i + 1;
}
else
break;
}
}
void HeapSort(vector<int> &nums){
int n = nums.size();
for (int i = n/2 - 1; i >= 0; i--)//创建初始堆
adjust(nums,i,n);
for (int j = n-1; j >= 1; j--){
//进行n-1次循环,完成堆排序
int tmp = nums[0];
nums[0] = nums[j];
nums[j] = tmp;
adjust(nums,0,j);
}
}
int main(){
vector<int> nums{
10,3,2,6,5,4,9,7,8};
HeapSort(nums);
for (int i =0; i < nums.size(); i++)
cout << nums[i] << endl;
return 0;
}