现代控制理论复习课
一、线性系统的状态空间描述
1. 状态空间的基本概念
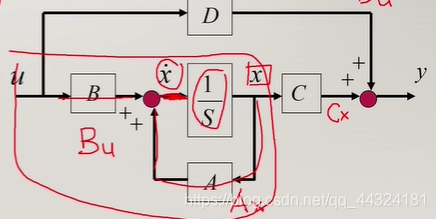
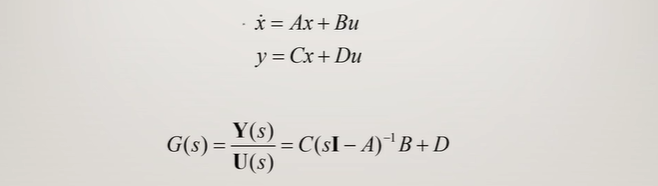
x ˙ ( t ) = A x ( t ) + B u ( t ) \dot{x}(t) = Ax(t)+Bu(t) x˙(t)=Ax(t)+Bu(t)
y ( t ) = C x ( t ) + D u ( t ) y(t) = Cx(t)+Du(t) y(t)=Cx(t)+Du(t)
2. 状态空间模型的建立(考点)
1) 机理建模(直接法)

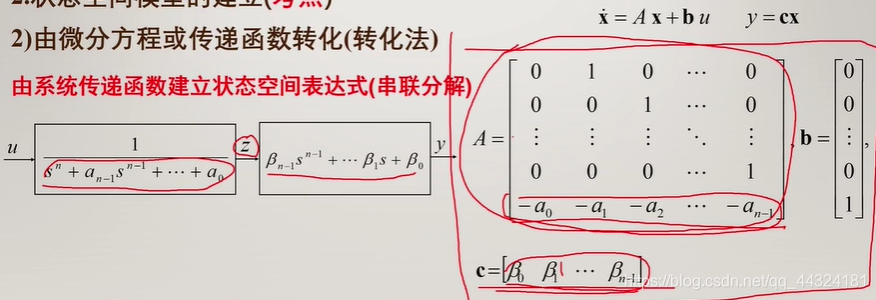
2) 由微分方程或传递函数转化(转化法)
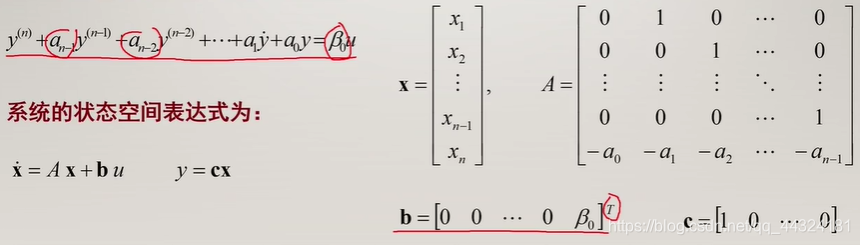
(1) 由微分方程建立状态空间表达式
(2) 由系统传递函数建立状态空间表达式(串联分解)
(3) 由系统传递函数建立状态空间表达式(单实极点)

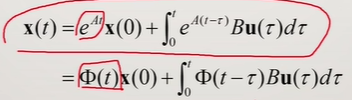
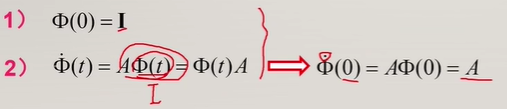
3. 状态方程的求解(考点)
4. 状态转移矩阵的性质(考点)
5. 系统的传递函数矩阵(考点)
二、线性系统的可控性和可观测性
1. 系统可控性与可观测性的概念
- 可控性:输入是否能改变状态。
- 可观性:输出是否能观测状态。

2. 系统可控性与可观测性的判据(考点)
1) Gram 矩阵判据
2) 秩判据
- 可控性要求行满秩: r a n k [ B A B ⋯ A n − 1 B ] = n rank[B\quad AB \quad \cdots A^{n-1}B]=n rank[BAB⋯An−1B]=n
- 可观性要求列满秩: r a n k [ C C A ⋮ C A n − 1 ] = n rank\begin{bmatrix} C \\ CA \\ \vdots \\ CA^{n-1} \end{bmatrix} = n rank⎣⎢⎢⎢⎡CCA⋮CAn−1⎦⎥⎥⎥⎤=n
3) PHB 判据
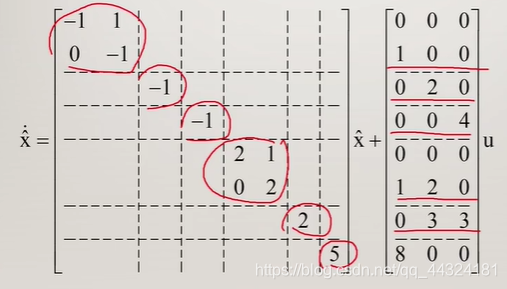
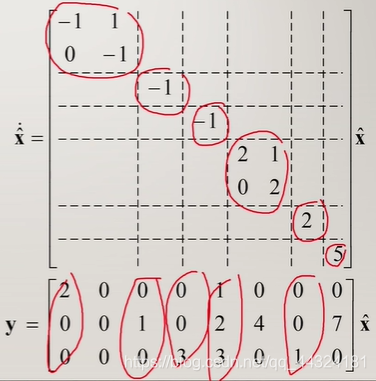
4) 约当规范型判据
- 可控(观)性:
- 每个约当块末行(首列)所对应 B 阵的行(列)不为全零行(列)。
- 同一特征值的不同约当块末行(首列)所对应 B 阵的行(列)线性无关。
举例
- 可控性:
- 可观性:
3. 系统的非奇异线性变换
把 A 阵转化为对角型或者能控规范型。
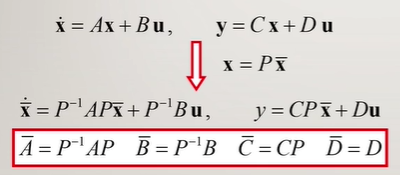
- 变换前后系统的特征值不变;
- 变换前后系统传递函数矩阵不变;
- 变换前后系统的可控性、可观测性不变。
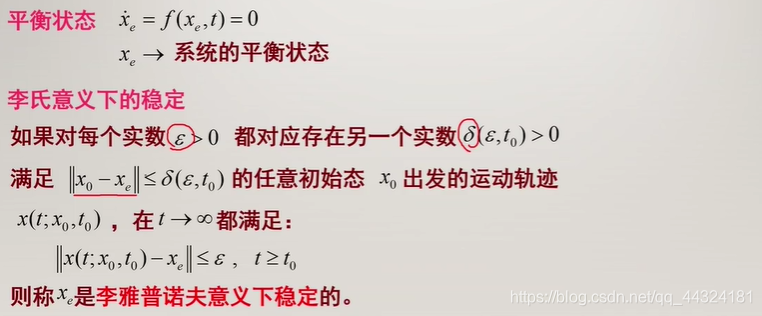
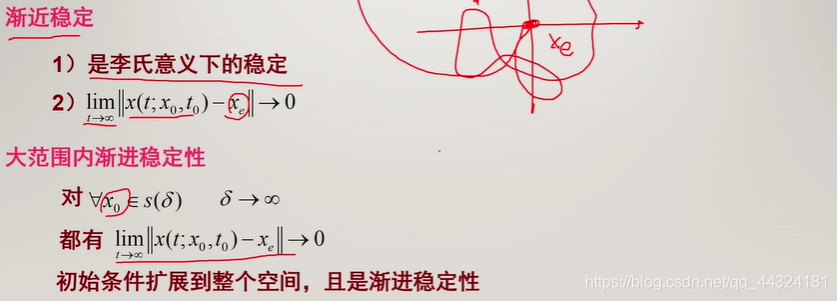
三、线性系统的稳定性
1. 稳定性的相关概念
2. 稳定性的判据
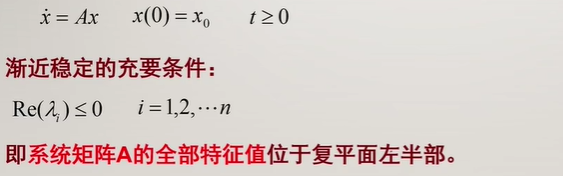
1) 线性定常系统稳定性的特征值判据(第一法、间接法)
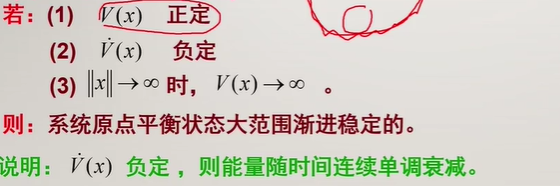
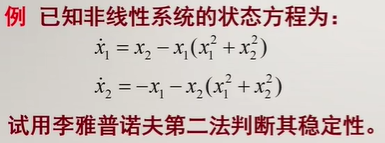
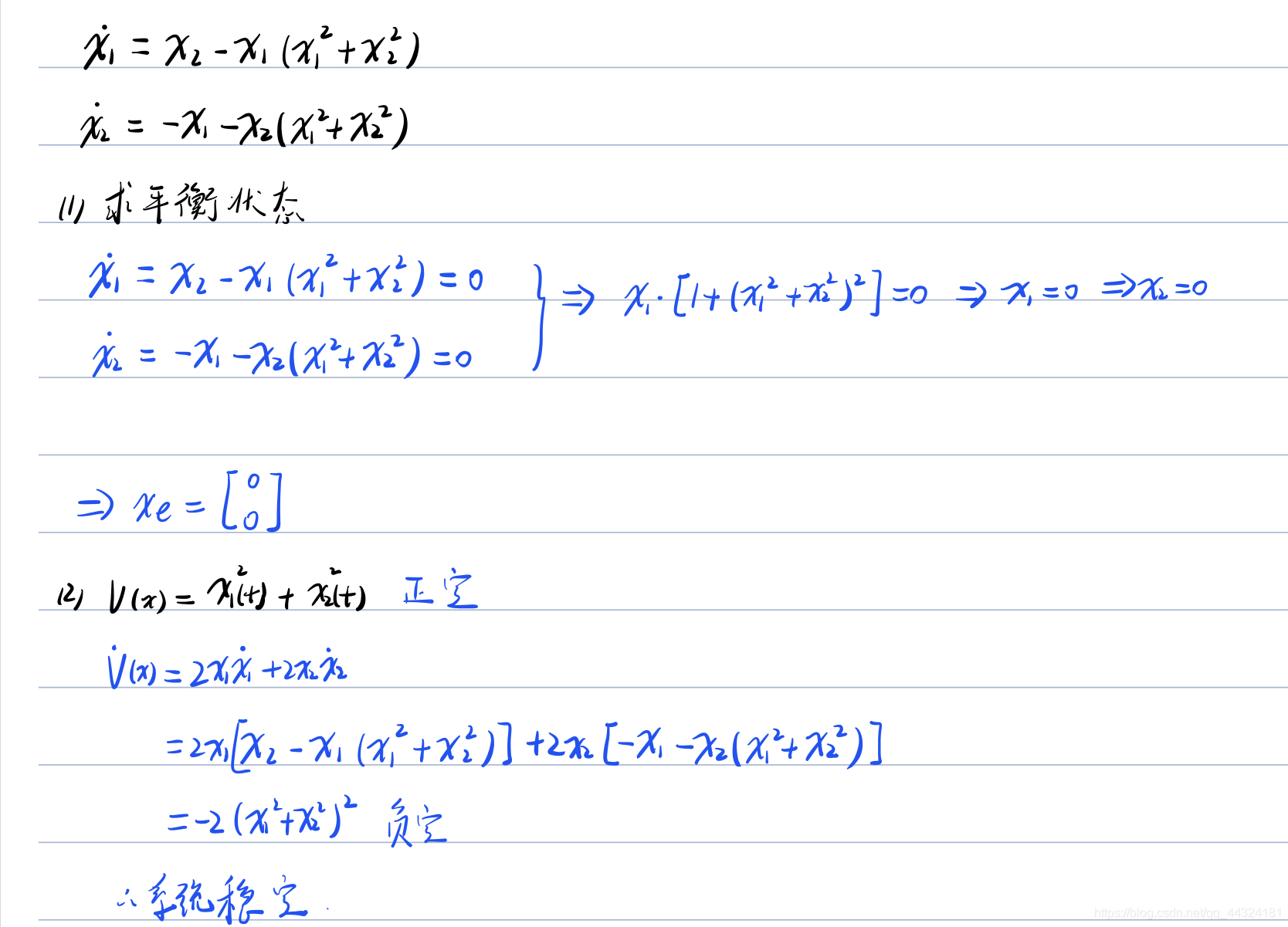
2) 第二法、直接法
3. 内部稳定与外部稳定的概念
- 外部稳定:有界输入——有界输出稳定(与传递函数极点有关)。
- 内部稳定:系统内部状态是否收敛(与系统矩阵 A 的特征值有关)。
- 注:传递函数极点是系统矩阵 A 的特征值的子集。
四、状态反馈与全维状态观测器
1. 状态反馈
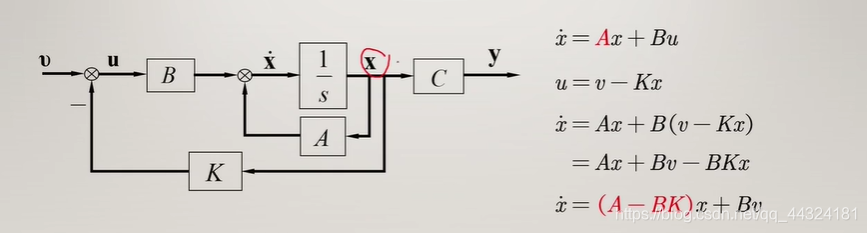
- 系统可控是 A − B K A-BK A−BK 的极点可以任意配置的前提条件。
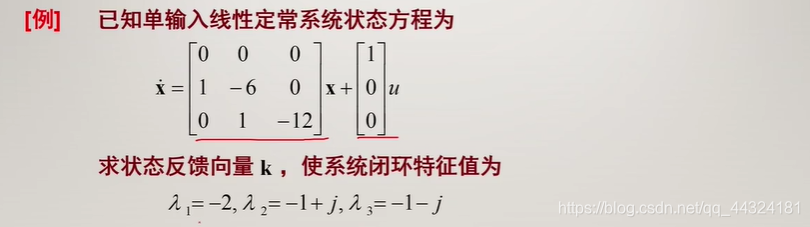
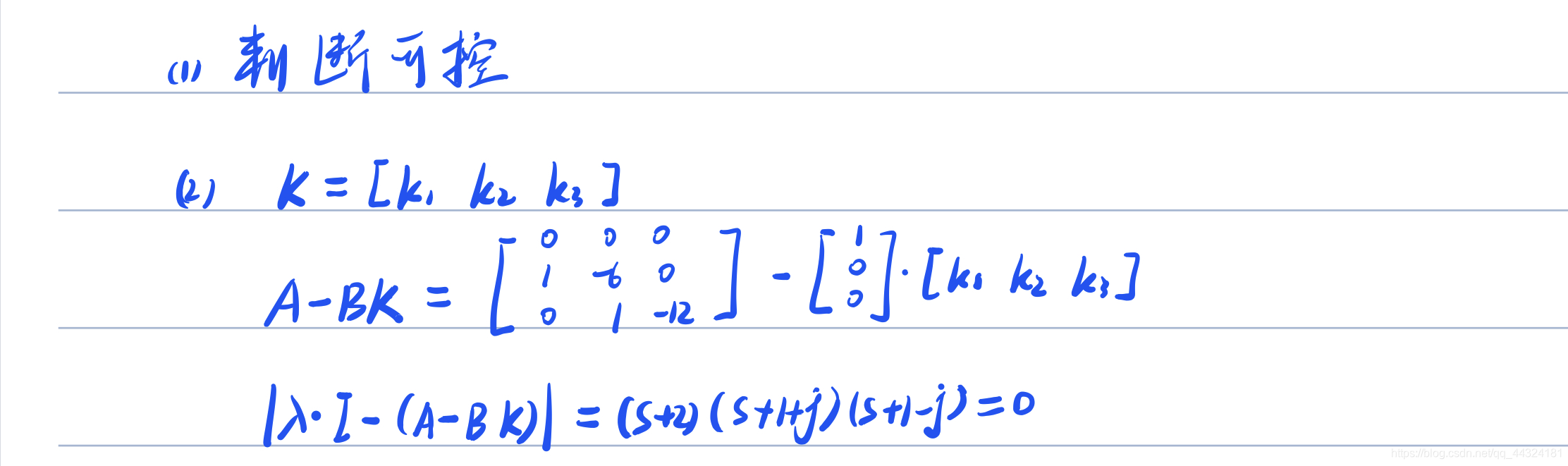
例题
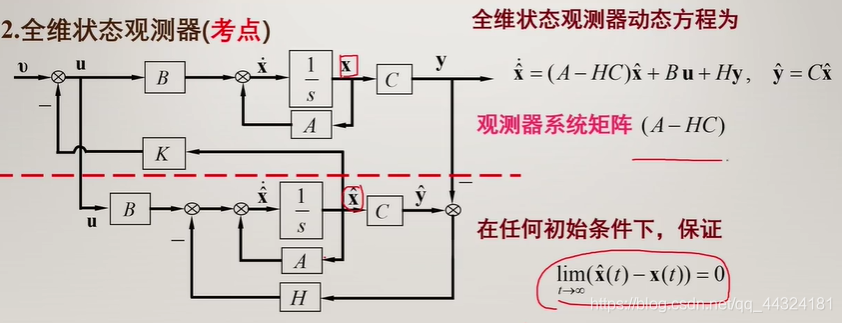
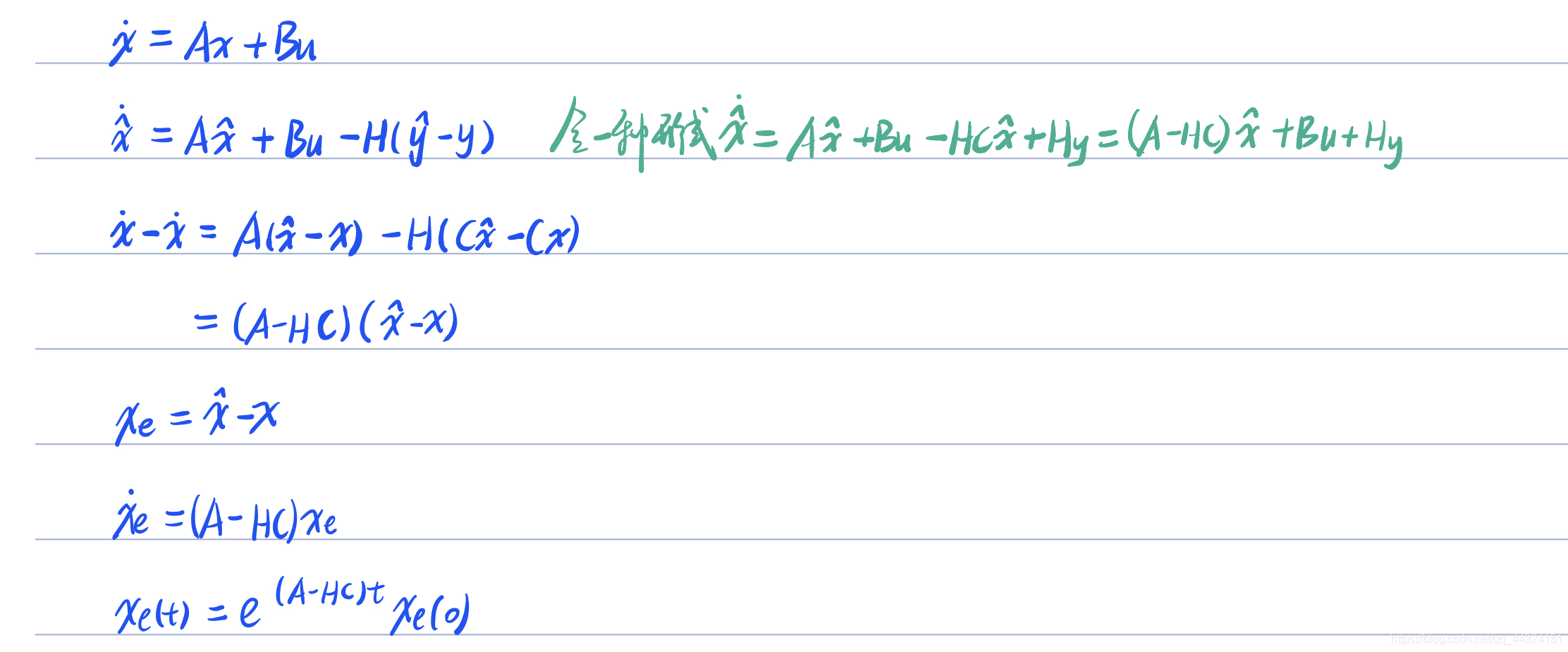
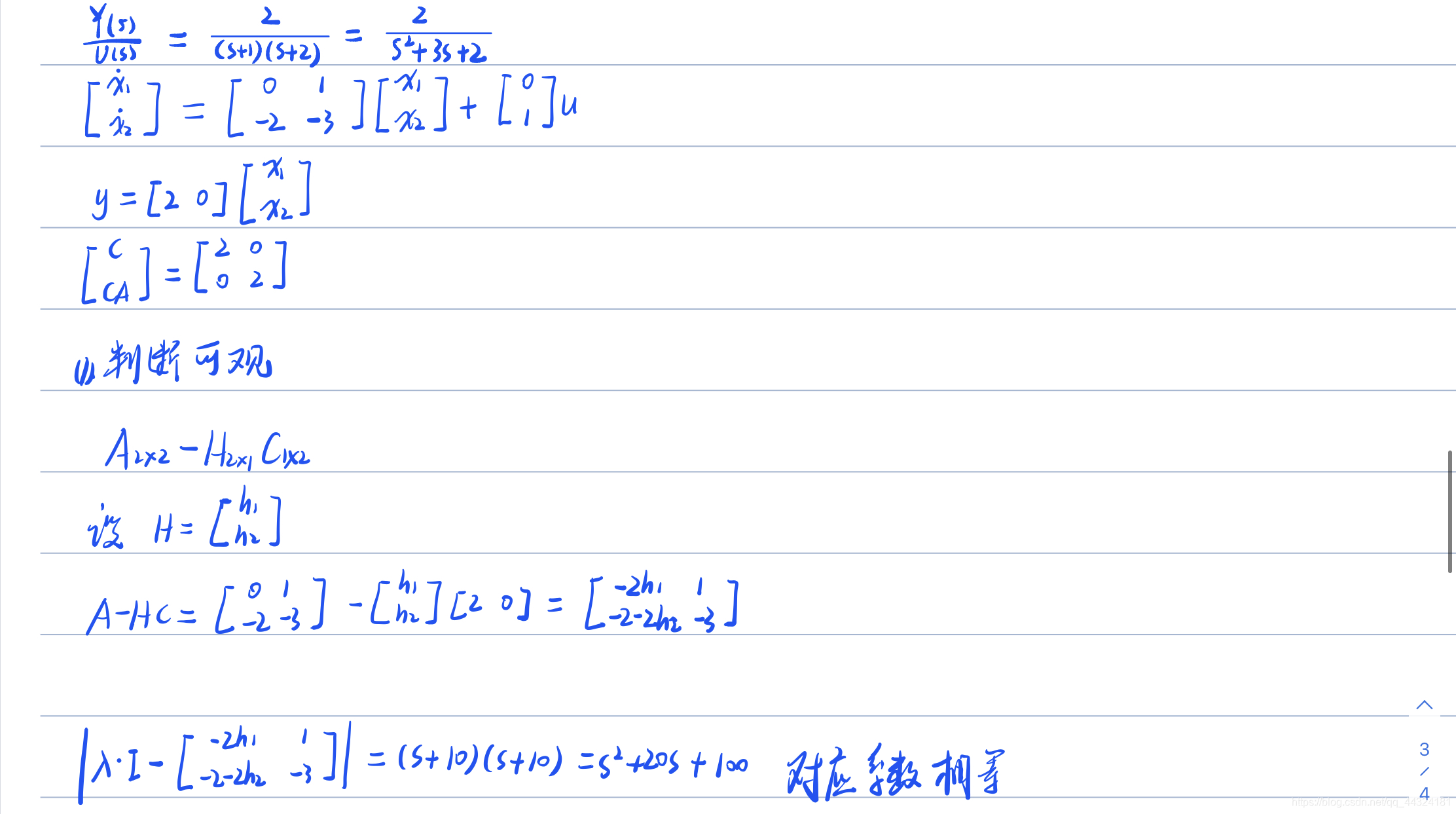
2. 全维状态观测器