简介
要控制车辆的运动,首先要对车辆的运动简历数字化模型,模型建立的越准确,对车辆运动的描述越准确,对撤离跟踪控制的效果就越好。处理真实反应车辆特性外,简历的模型也应该可能的简单易用。
1.以后轴的中心点为原点的车辆运动模型
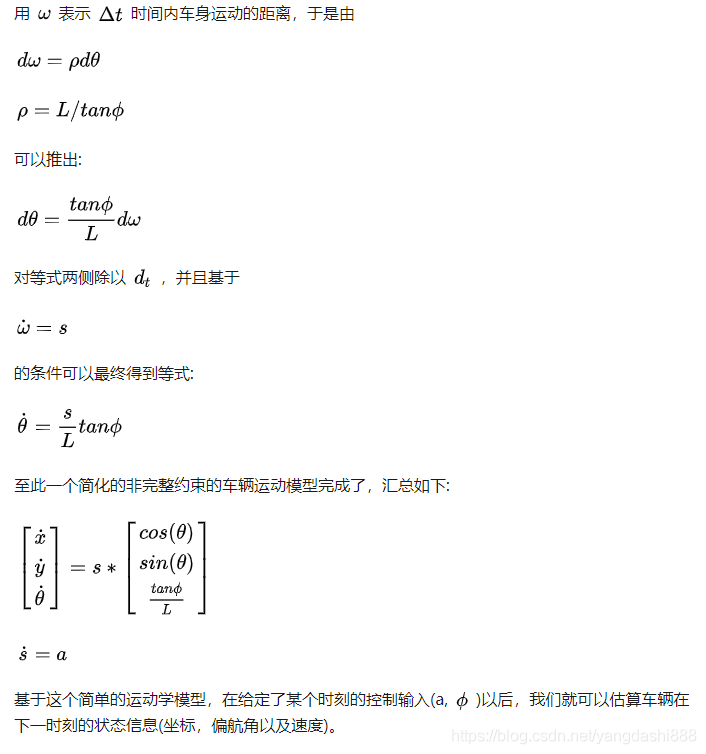

的三个值主要是指x、y方向的速度跟车体自身的角速度。当乘以dt的时候,则可以看做这个时间段内走过的距离跟角度。这里是把运行的a线速度,其中θ的变换值是受前轮a的影响,通过L进行转换成后轮的θ变化量。
主要的参考地址:
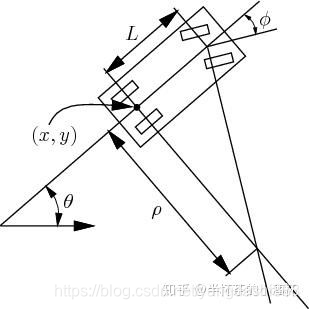
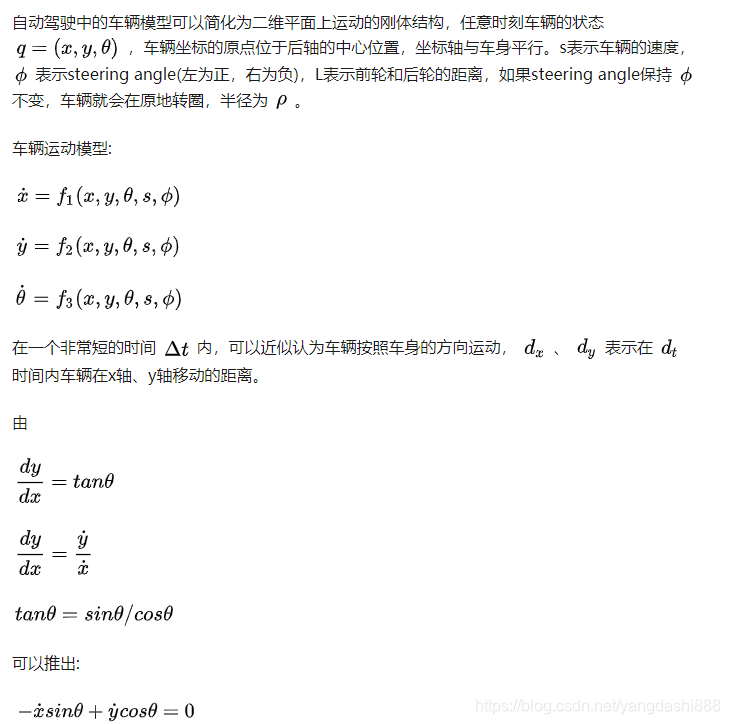
自动驾驶中的车辆运动学模型