可以结合之前的一篇文章来看,都是一样的,不过本文是模拟IIC,之前的是硬件IIC。
传送门:STM32F429–I2C通信(读写EEPROM,串口返回测试数据)
一、定义
IIC 即Inter-Integrated Circuit(集成电路总线),这种总线类型是由菲利浦半导体公司在八十年代初设计出来的,主要是用来连接整体电路(ICS),IIC是一种多向控制总线,也就是说多个芯片可以连接到同一总线结构下,同时每个芯片都可以作为实施数据传输的控制源。这种方式简化了信号传输总线。
I2C串行总线一般有两根信号线,一根是双向的数据线SDA,另一根是时钟线SCL。所有接到I2C总线设备上的串行数据SDA都接到总线的SDA上,各设备的时钟线SCL接到总线的SCL上。
与SPI相同的是,都是多选一,即可以有多个从设备,但是一次通信的时候,只能选择其中的一个。且IIC的从设备选择上,有7位地址,谁控制了时钟线,谁就是从机,而不是像SPI那样通过片选信号线CS来选择。
二、读写AT24C02
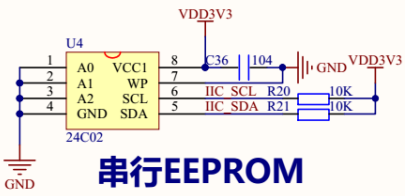
(1)电路原理图如下:WP引脚接地,表明可读可写,如果接VCC只读不可写。
(2)引脚说明图如下:
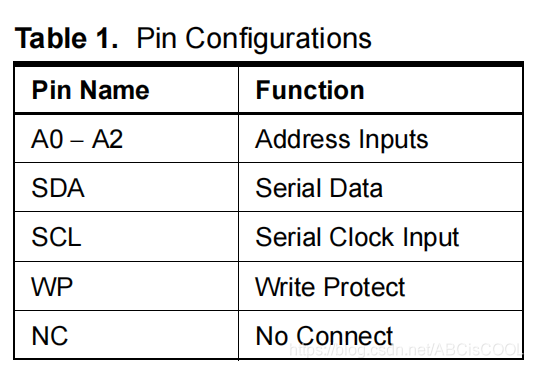
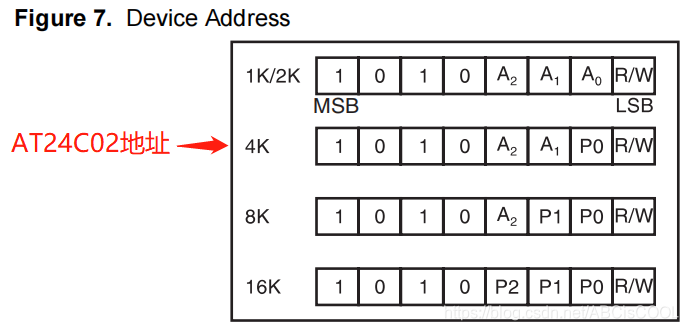
A0-A2,接在了GND,代表是0,R/-W,W的上面是有一横的,代表0有效,读是1有效,所以读操作是0XA0,写操作是0XA1。
(3)地址说明:
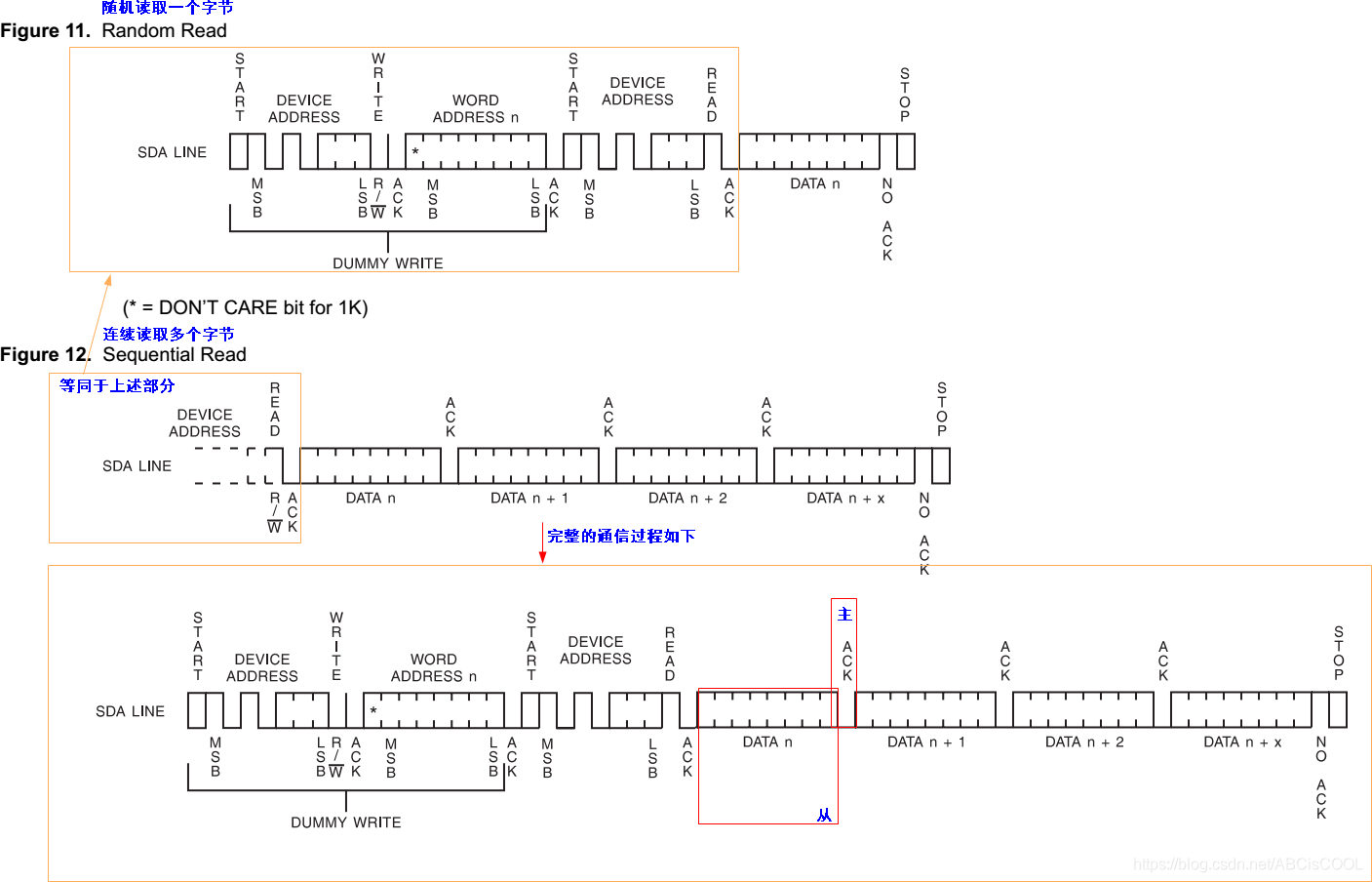
(4)通信过程

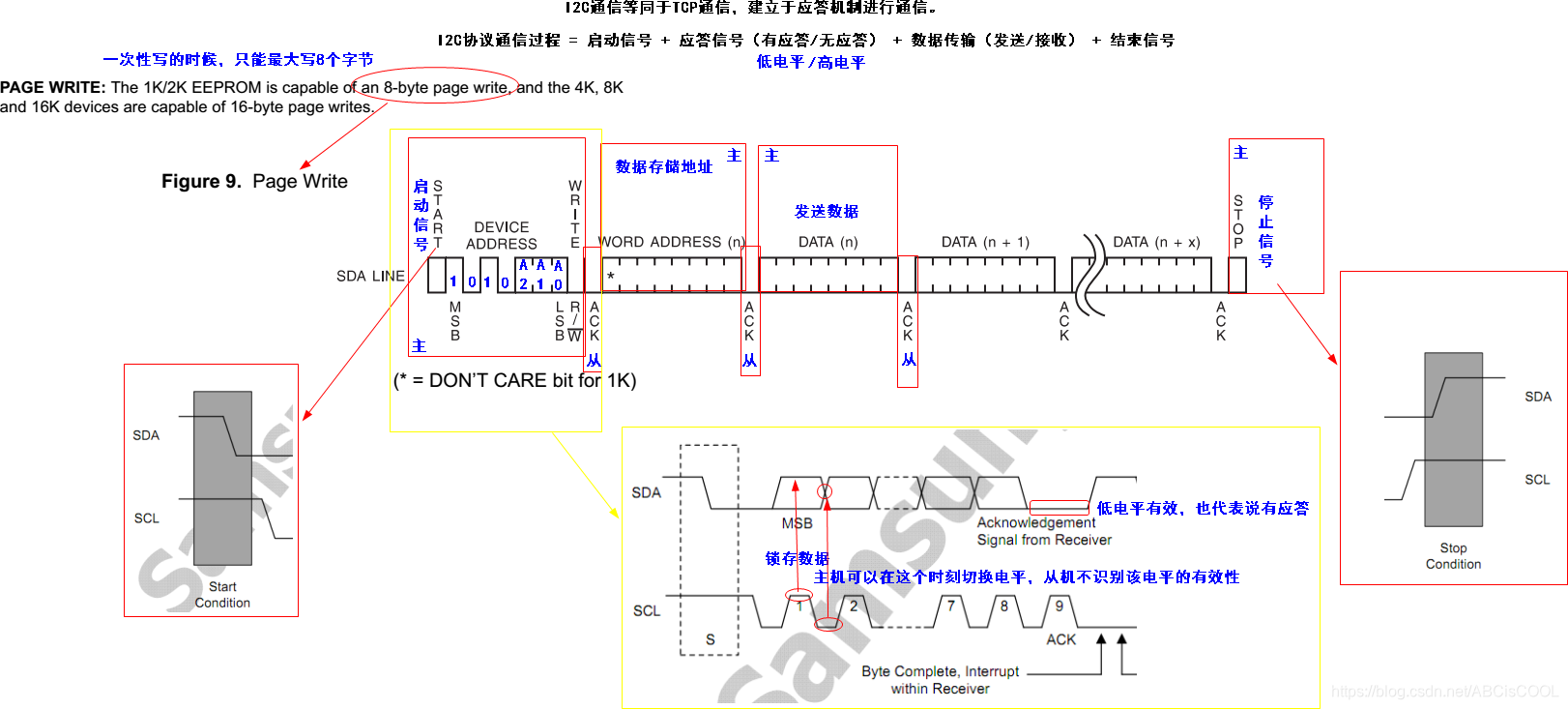
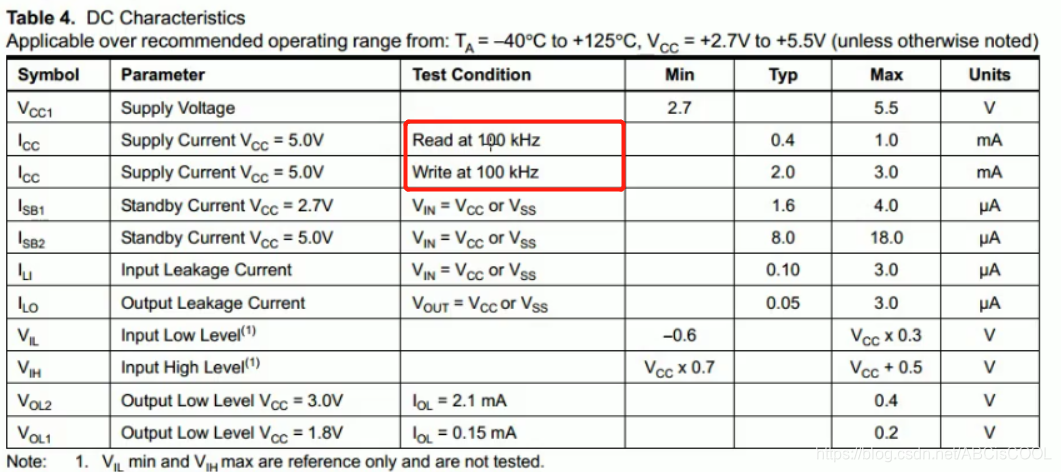
(1)起始信号:由上图可知,读写的速率为100KHZ,那么1/100khz= 10us,在起始信号的时候,高地电平各占一半,即至少需要持续5us。SCL持续高电平,直到SDA线由高电平到低电平变化,SCL才变为低电平。可以写出代码:
GPIO初始化
void i2c_init(void)
{
//使能GPIOB时钟
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOB, ENABLE);
//PB8 PB9初始化设置
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8 | GPIO_Pin_9; //8号和9号引脚
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT; //普通输出模式,
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽输出,驱动LED需要电流驱动
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz; //100MHz
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; //上拉
GPIO_Init(GPIOB, &GPIO_InitStructure); //初始化GPIOB,把配置的数据写入寄存器
//i2c引脚初始化状态,默认为高电平
SCL =1;
SDA_W=1;
}
自定义更改输入输出模式
void i2c_sda_mode(uint32_t iomode)
{
//PB9初始化设置
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //9号引脚
GPIO_InitStructure.GPIO_Mode = iomode; //输出模式/输入模式
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽输出,驱动LED需要电流驱动
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz; //100MHz
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; //上拉
GPIO_Init(GPIOB, &GPIO_InitStructure); //初始化GPIOB,把配置的数据写入寄存器
}
起始信号
void i2c_start(void)
{
//保证SDA引脚为输出模式
i2c_sda_mode(GPIO_Mode_OUT);
SCL =1;
SDA_W=1;
delay_us(5);//100KHz通信速率,但是不能超过400KHz
SDA_W=0;
delay_us(5);
SCL =0; //保持占用I2C总线,允许数据改变
}
(2)结束信号
读上图,输出模式,SCL和SDA都为低电平,延时一段时间,SCL变为高电平,延时一段时间,SDA变为高电平,持续一段时间即可。
void i2c_stop(void)
{
//保证SDA引脚为输出模式
i2c_sda_mode(GPIO_Mode_OUT);
SCL =0;
SDA_W=0;
delay_us(5);
SCL =1;
delay_us(5);
SDA_W=1;
delay_us(5);
}
(3)发送1字节数据
拉低时钟SCL,允许数据进行变化,延时一段时间;
然后判断传进来的data每一位的值,如果读取的data位7为1,那么SDA=1;如果位7为0,那么SDA=0;然后拉高SCL延时一段时间,这样就完成了一位的发送,以此循环八次。因为要允许下一次循环可以改变数据,所以还要把SCL变为低电平。
void i2c_send_byte(uint8_t txd)
{
uint32_t i=0;
//保证SDA引脚为输出模式
i2c_sda_mode(GPIO_Mode_OUT);
//保证SCL引脚开始的时候为低电平,允许数据的改变
SCL =0;
delay_us(5);
//连续发送8个bit,采用最高有效位优先进行发送
for(i=0; i<8; i++)
{
if(txd & (1<<(7-i)))
SDA_W=1;
else
SDA_W=0;
delay_us(5);
//锁存数据,让从机进行识别
SCL=1;
delay_us(5);
//允许改变数据,从机无视该数据
SCL=0;
delay_us(5);
}
}
(4)等待从机应答
有应答:低电平;无应答;高电平
uint8_t i2c_wait_ack(void)
{
uint8_t ack=0;
//保证SDA引脚为输入模式
i2c_sda_mode(GPIO_Mode_IN);
SCL=1;
delay_us(5);
//有应答为低电平,无应答为高电平
if(SDA_R) //无应答
{
ack=1;
i2c_stop();
}
else //有应答
ack=0;
SCL =0; //保持占用I2C总线,允许数据改变
delay_us(5);
return ack;
}
(5)整合上面四部分的代码
void at24c02_write(uint8_t addr,uint8_t *pbuf,uint8_t len)
{
uint8_t ack=0;
//发送启动信号
i2c_start();
//发送寻址地址为0xA0,写访问操作
i2c_send_byte(0xA0);
//等待应答
ack = i2c_wait_ack();
if(ack)
{
printf("24c02 ack device address fail\r\n");
return;
}
printf("24c02 is online\r\n");
//发送数据存储地址
i2c_send_byte(addr);
//等待应答
ack = i2c_wait_ack();
if(ack)
{
printf("24c02 ack word address fail\r\n");
return;
}
printf("24c02 word address ok\r\n");
while(len--)
{
//发送数据
i2c_send_byte(*pbuf++);
//等待应答
ack = i2c_wait_ack();
if(ack)
{
printf("24c02 ack send data fail\r\n");
return;
}
}
//发送停止信号,整个通信过程结束
i2c_stop();
printf("24c02 write ok\r\n");
}
主函数调用
i2c_init();
printf("24c02 write addr 0 data is 1\r\n");
memset(buf,2,sizeof buf);
//页编程最大是8个字节
at24c02_write(0,buf,8);
delay_ms(500);
memset(buf,0,sizeof buf);
printf("24c02 read addr 0 data is:\r\n");
(6)读数据,从机发送数据,主机发送应答。
读1字节数据
uint8_t i2c_recv_byte(void)
{
uint32_t i=0;
uint8_t rxd=0;
//保证SDA引脚为输出模式
i2c_sda_mode(GPIO_Mode_IN);
//保证SCL引脚开始的时候为低电平,允许数据的改变
SCL =0;
delay_us(5);
//连续接收8个bit,采用最高有效位优先进行接收
for(i=0; i<8; i++)
{
//delay_us(5);
//锁存数据
SCL=1;
delay_us(5);
if(SDA_R)
rxd|=1<<(7-i);
//允许改变数据
SCL=0;
delay_us(5);
}
return rxd;
}
主机发送应答
void i2c_ack(uint8_t ack)
{
//保证SDA引脚为输出模式
i2c_sda_mode(GPIO_Mode_OUT);
//保证SCL引脚开始的时候为低电平,允许数据的改变
SCL =0;
delay_us(5);
if(ack)
SDA_W=1;
else
SDA_W=0;
delay_us(5);
//锁存数据,让从机进行识别
SCL=1;
delay_us(5);
//允许改变数据,从机无视该数据
SCL=0;
delay_us(5);
}
读取数据函数
void at24c02_read(uint8_t addr,uint8_t *pbuf,uint8_t len)
{
uint8_t ack=0;
//发送启动信号
i2c_start();
//发送寻址地址为0xA0,写访问操作
i2c_send_byte(0xA0);
//等待应答
ack = i2c_wait_ack();
if(ack)
{
printf("24c02 ack device address fail\r\n");
return;
}
printf("24c02 is online\r\n");
//发送数据存储地址
i2c_send_byte(addr);
//等待应答
ack = i2c_wait_ack();
if(ack)
{
printf("24c02 ack word address 1 fail\r\n");
return;
}
printf("24c02 word address ok\r\n");
//重新发送启动信号
i2c_start();
//发送寻址地址为0xA1,读访问操作
i2c_send_byte(0xA1);
//等待应答
ack = i2c_wait_ack();
if(ack)
{
printf("24c02 ack device address 2 fail\r\n");
return;
}
len=len-1;
while(len--)
{
//接收数据
*pbuf++=i2c_recv_byte();
//主动发送应答给从机
i2c_ack(0);
}
//接收数据
*pbuf=i2c_recv_byte();
//主动发送无应答给从机
i2c_ack(1);
//发送停止信号,整个通信过程结束
i2c_stop();
printf("24c02 read ok\r\n");
}
调用
at24c02_read(0,buf,8);
for(i=0;i<8;i++)
{
printf("%02X ",buf[i]);
}
注意;在写和读直接需要加延时