参考资料
https://github.com/Krasjet/quaternion
quaternion.pdf:chrome-extension://ikhdkkncnoglghljlkmcimlnlhkeamad/pdf-viewer/web/viewer.html?file=https%3A%2F%2Fkrasjet.github.io%2Fquaternion%2Fquaternion.pdf
- 对四元数与3D旋转相关理论进行介绍,较详细的理论推导
- 四元数插值原理及方法介绍等
bonus_gimbal_lock.pdf:chrome-extension://ikhdkkncnoglghljlkmcimlnlhkeamad/pdf-viewer/web/viewer.html?file=https%3A%2F%2Fkrasjet.github.io%2Fquaternion%2Fbonus_gimbal_lock.pdf
- 对欧拉角的万向锁问题根源进行分析
quaternion.pdf 文档目录:
重要公式小结
2D旋转

四元数基础
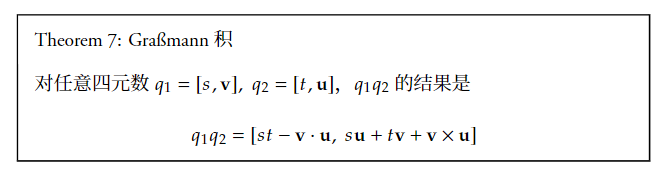
四元数相乘:Grabmann积
四元数的逆与共轭

四元数 求 轴、角

四元数的左乘和右乘矩阵

双倍覆盖

四元数q0 q1 夹角,与 旋转变化量所代表的旋转角度 之间关系


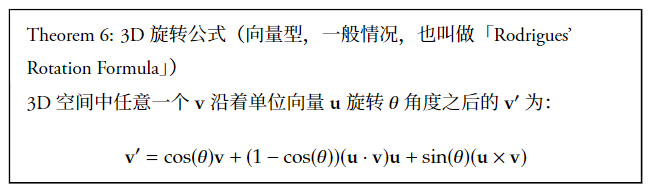
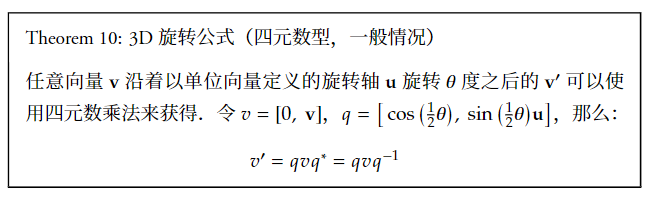
3D旋转

不同表达形式转换关系

![]()

四元数插值
线性插值Lerp

正规化线性插值Nlerp


球面线性插值Slerp


双倍覆盖带来的问题

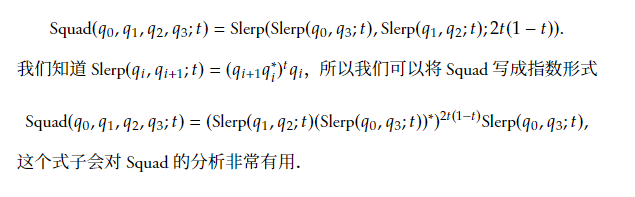
球面四边形插值Squad
(使得插值曲线在中间点处连续且可导)