目录
原理图

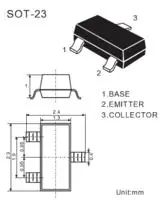
对应RK3399Pro的引脚是GPIO4_C6引脚,采用的是npn型小功率晶体三极管(9014),经常用于收音机以及各种放大电路中,SOT-23封装。
| 引脚 | 极型 |
|---|---|
| 1 | 基极 |
| 2 | 发射极 |
| 3 | 集电极 |
-
基极接RK3399Pro的引脚
-
发射极接GND
-
集电极接蜂鸣器引脚
添加设备树
在设备树
arch/arm64/boot/dts/rockchip/rk3399pro-toybrick-prop-linux.dts 中添加
gpio-buzzer{
status = "okay";
compatible = "gpio-buzzer";
gpio-buzzer = <&gpio4 RK_PC6 GPIO_ACTIVE_LOW>;
};编写驱动程序
设备节点
static const struct of_device_id of_gec_buzer_match[] = {
{ .compatible = "gpio-buzzer", }, //compatible 兼容属性名,需与设备树节点的属性一致
{},
};
static struct platform_driver gec3399_buzzer_driver = {
.probe = gec3399_buzzer_probe, //驱动探测
.remove = gec3399_buzzer_remove, //驱动移除
.driver = {
.name ="gpio-buzzer",
.owner = THIS_MODULE,
.of_match_table = of_gec_buzer_match, //设备树设备匹配
},
};文件入口函数
static int gec3399_buzzer_probe(struct platform_device *pdev)
{
int ret;
struct device_node *buz_node = pdev->dev.of_node;
enum of_gpio_flags flag;
//第一步:获取设备树的设备节点的GPIO引脚
gpio_buz = of_get_named_gpio_flags(buz_node,"goio-buzzer", 0, &flag); //从设备树获取GPIO号
if (!gpio_is_valid(gpio_buz)) {
printk("gpio-buzzer: %d is invalid\n",gpio_buz);
ret = -ENODEV;
goto err_get_gpio;
}
printk("gpio-buzzer = %d\n",gpio_buz);
//第二步:申请GPIO引脚资源
ret = gpio_request(gpio_buz,"BUZZER_DYDR"); //申请gpio_buz引脚为GPIO模式
if(ret < 0){
printk("gpio_request gpio = ak8963c_DYDR error\n");
goto err_get_gpio;
}
//第三步:GPIO引脚初始化低电平
ret = gpio_direction_output(gpio_buz,0); //初始划蜂鸣器引脚为低电平状态
if(ret < 0){
printk("gpio direction input gpio = ak8963c_DYDR error\n");
goto err_gpio_direction;
}
//第四步:杂项设备注册字符设备
ret = misc_register(&gec3399_buzzer_misc); //注册字符设备
if(ret < 0){
printk("misc register error\n");
goto err_misc_register;
}
//提示注册成功
printk("buzzer dirve install succee\n");
return 0;
err_misc_register:
err_gpio_direction:
gpio_free(gpio_buz);
err_get_gpio:
misc_deregister(&gec3399_buzzer_misc);
return ret;
}杂项设备
static struct miscdevice gec3399_buzzer_misc = {
.minor = MISC_DYNAMIC_MINOR,
.fops = &gec3399_buzzer_fops,
.name = "buzzer_drv", //设备节点名
}; //混杂设备结构体定义和初始化文件操作集
static const struct file_operations gec3399_buzzer_fops = {
.owner = THIS_MODULE,
.unlocked_ioctl = gec3399_buzzer_ioctl, //包含了控制函数
.release = gec3399_buzzer_release,
}; //文件操作集结构体控制函数
static long gec3399_buzzer_ioctl(struct file *file, unsigned int cmd, unsigned long arg)
{
switch(cmd)
{
case BUZZER_START:
gpio_set_value(gpio_buz,1);
break;
case BUZZER_STOP :
gpio_set_value(gpio_buz,0);
break;
}
return 0;
}
完整驱动代码
#include <linux/kernel.h>
#include <linux/module.h>
#include <linux/cdev.h>
#include <linux/fs.h>
#include <linux/errno.h>
#include <linux/uaccess.h>
#include <linux/device.h>
#include <linux/io.h>
#include <linux/miscdevice.h>
#include <linux/gpio.h>
#include <linux/device.h>
#include <linux/ioport.h>
#include <linux/ioctl.h>
#include <linux/interrupt.h>
#include <linux/uaccess.h>
#include <linux/miscdevice.h>
#include <linux/wait.h>
#include <linux/delay.h>
#include <linux/platform_device.h>
#include <linux/i2c.h>
#include <linux/of.h>
#include <linux/of_gpio.h>
#define BUZZER_START _IO('B',0)
#define BUZZER_STOP _IO('B',1)
int gpio_buz;
static long gec3399_buzzer_ioctl(struct file *file, unsigned int cmd, unsigned long arg)
{
switch(cmd)
{
case BUZZER_START:gpio_set_value(gpio_buz,1);break;
case BUZZER_STOP :gpio_set_value(gpio_buz,0);break;
}
return 0;
}
static int gec3399_buzzer_release(struct inode *inode, struct file *file)
{
gpio_set_value(gpio_buz,0); //应用程序退出时,关闭蜂鸣器
return 0;
}
static const struct file_operations gec3399_buzzer_fops = {
.owner = THIS_MODULE,
.unlocked_ioctl = gec3399_buzzer_ioctl,
.release = gec3399_buzzer_release,
}; //文件操作集结构体
static struct miscdevice gec3399_buzzer_misc = {
.minor = MISC_DYNAMIC_MINOR,
.fops = &gec3399_buzzer_fops,
.name = "buzzer_drv",
}; //混杂设备结构体定义和初始化
static int gec3399_buzzer_probe(struct platform_device *pdev)
{
int ret;
struct device_node *buz_node = pdev->dev.of_node;
enum of_gpio_flags flag;
printk("gpio-buzzer math succee\n");
ret = misc_register(&gec3399_buzzer_misc); //注册字符设备
if(ret < 0){
printk("misc register error\n");
goto err_misc_register;
}
gpio_buz = of_get_named_gpio_flags(buz_node,"goio-buzzer", 0, &flag); //从设备树获取GPIO号
if (!gpio_is_valid(gpio_buz)) {
printk("gpio-buzzer: %d is invalid\n",gpio_buz);
ret = -ENODEV;
goto err_get_gpio;
}
printk("gpio-buzzer = %d\n",gpio_buz);
ret = gpio_request(gpio_buz,"ak8963c_DYDR"); //申请gpio_buz引脚为GPIO模式
if(ret < 0){
printk("gpio_request gpio = ak8963c_DYDR error\n");
goto err_get_gpio;
}
ret = gpio_direction_output(gpio_buz,0); //初始划蜂鸣器为关闭状态
if(ret < 0){
printk("gpio direction input gpio = ak8963c_DYDR error\n");
goto err_gpio_direction;
}
printk("buzzer dirve install succee\n");
return 0;
err_gpio_direction:
gpio_free(gpio_buz);
err_get_gpio:
misc_deregister(&gec3399_buzzer_misc);
err_misc_register:
return ret;
}
static int gec3399_buzzer_remove(struct platform_device *pdev)
{
gpio_free(gpio_buz);
misc_deregister(&gec3399_buzzer_misc);
printk("buzzer dirve rmove succee\n");
return 0;
}
static const struct of_device_id of_gec_buzer_match[] = {
{ .compatible = "gpio-buzzer", }, //compatible 兼容属性名,需与设备树节点的属性一致
{},
};
static struct platform_driver gec3399_buzzer_driver = {
.probe = gec3399_buzzer_probe, //驱动探测
.remove = gec3399_buzzer_remove, //驱动移除
.driver = {
.name ="gpio-buzzer",
.owner = THIS_MODULE,
.of_match_table = of_gec_buzer_match, //设备树设备匹配
},
};
module_platform_driver(gec3399_buzzer_driver);
//module的描述,不是必需的。#modinfo buzzer_drv.ko
MODULE_AUTHOR("[email protected]");
MODULE_DESCRIPTION("buzzer driver for GEC6818");
MODULE_LICENSE("GPL"); //符合GPL协议
MODULE_VERSION("V1.0");测试代码
#include <stdio.h> //标准IO库
#include <stdlib.h> //标准lib库
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <unistd.h>
#include <sys/ioctl.h>
//宏定义
#define BUZZER_START _IO('B',0)
#define BUZZER_STOP _IO('B',1)
int main(void)
{
int fd_buzzer;
int ret;
//第一步:打开设备节点
fd_buzzer = open("/dev/buzzer_drv", O_WRONLY);
if(fd_buzzer < 0)
{
perror("open buzzer driver");
return -1;
}
while(1)
{
//第二步:打开蜂鸣器
ret = ioctl(fd_buzzer,BUZZER_START);
if(ret < 0)
perror("write buzzer driver ");
//延时1秒
sleep(1);
//第三步:关闭蜂鸣器
ret = ioctl(fd_buzzer,BUZZER_STOP);
if(ret < 0 )
perror("write buzzer driver ");
//延时1秒
sleep(1);
}
//关闭设备节点
close(fd_buzzer);
return 0;
}Makefile文件
obj-m += buzzer_drv.o
KERNELDIR:=/file/RK3399Pro/rk3399pro_git_repo/kernel (这是内核源码的位置)
PWD:=$(shell pwd)
default:
$(MAKE) -C $(KERNELDIR) M=$(PWD) modules
test:
aarch64-linux-gnu-gcc buzzer_test.c -o buzzer_test
clean:
rm -rf *.o *.order .*.cmd *.ko *.mod.c *.symvers *.tmp_versions测试步骤
编译源码
在ubuntu中输入:
make得到驱动目标文件buzzer_drv.ko
输入:
make test得到测试目标文件:buzzer_test
加载驱动
在开发板命令终端输入:
insmod buzzer_drv.ko执行测试程序
在开发板命令终端输入:
chmod 777 buzzer_test
./buzzer_test实验现象
蜂鸣器鸣叫