作为未来整车360度感知的重要组成部分之一,环视(鱼眼)摄像头的潜力还有待挖掘。目前,在前向ADAS中,120度鱼眼镜头主要用于感知交通信号灯、行驶路径上的障碍物和距离较近的物体,适用于城市街道、低速缓行的交通场景。
而用于泊车场景的环视(鱼眼)摄像头则主要与超声波传感器融合,实现各种不同等级的自动泊车功能。同时,部分厂商将其纳入行车ADAS的感知组合中。
高工智能汽车研究院监测数据显示,今年1-9月国内市场新车搭载全景环视上险量为313.62万辆,同比增长65.58%;不过,前装搭载率却远低于行车ADAS,这意味着,市场洼地效应正在形成。
近日,作为全球环视及泊车软硬件方案的主要供应商,法雷奥宣布正式推出WoodScape数据集,这是全球首个面向量产的环绕视图鱼眼相机的开源数据集,目的是用于自动驾驶和泊车的深度开发。
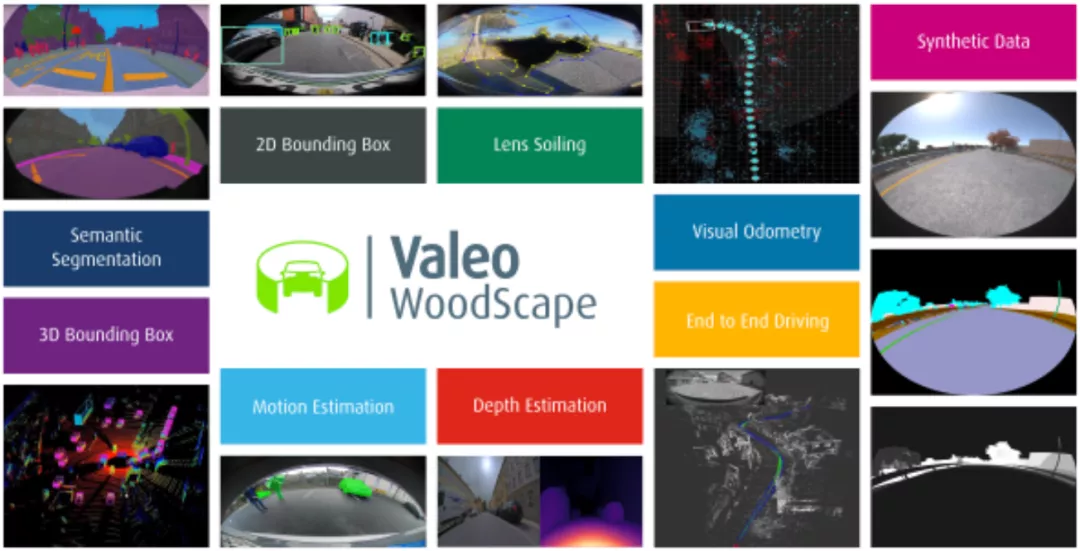
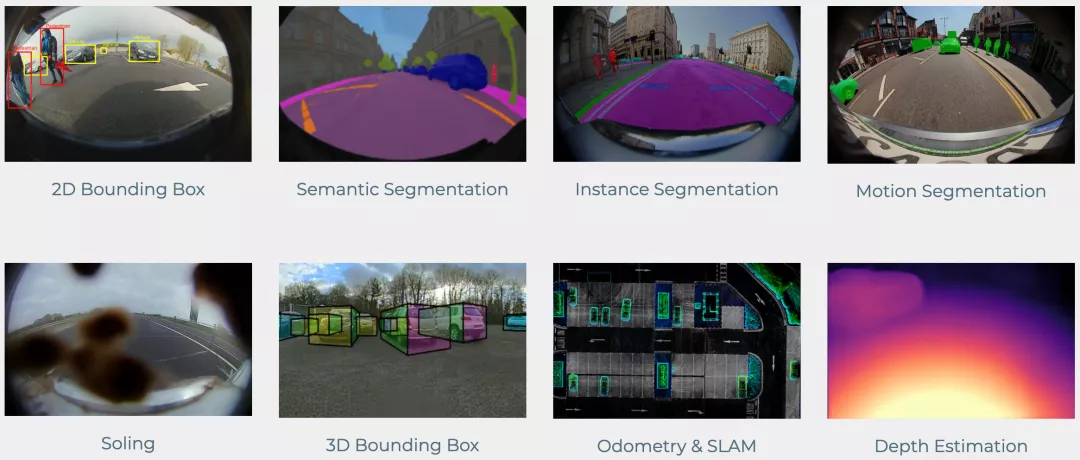
WoodScape由法雷奥在欧洲搭载的车队基于环视鱼眼相机拍摄的超过10,000幅图像,并提供了各种任务所需的标注,包括语义分割、深度估计、2D物体检测、视觉测距、运动分割以及端到端方案开发。
一、
一直以来,自动驾驶开发最大的挑战之一是获取足够的相关数据,这些数据需要被准确标记和人工注释,以便感知系统对车辆周围的物体是否进行正确的识别和分类。
不过,在此之前,行业内更多的数据集仍然是集中在前向行车摄像头、雷达及激光雷达数据,而考虑到鱼眼摄像头尤其是环视在后续会涉及到越来越多的不同感知任务,法雷奥希望借助WoodScape数据集来帮助行业解决这一挑战。
法雷奥舒适和驾驶辅助业务负责人Marc Vrecko表示,“通过WoodScape,我们希望鼓励研究团体开发针对高速和低速车辆自动化场景的鱼眼摄像头的计算机视觉算法。”因为,和其他类型传感器一样,鱼眼摄像头能够实现360°感知,也是自动驾驶的关键。
在计算平台方面,360全景环视也在从过去单一的外挂ECU盒子(基于低算力芯片)或集成于车机,逐步开始向座舱域控制器、智能驾驶域控制器或者高阶APA域控制器进行算法集成,比如主流的TDA4VM、高通8155等平台。
在具体的软硬件要求上,还增加了CNN神经网络加速器,融合泊车增加的ASIL-D决策处理,同步定位以及地图SLAM、DVR的行车记录以及低速状态下近距离和远距离的物体分类检测。
从基础环视功能到融合泊车、再到全自动代客泊车,软硬件方案对传感器、数据处理、决策的需求越来越高,也在一定程度上对现有的环视(鱼眼摄像头)供应商提出了更高要求。
同时,一些厂商也开始对传统的鱼眼摄像头进行性能升级,包括支持光流和多目标检测。以英伟达发布的Hyperion 8自动驾驶参考设计平台为例,除了双芯片计算平台、12个舱外摄像头中就包含了4个环视鱼眼摄像头。
比如华为去年推出的800万像素超级鱼眼摄像头,采用自主视觉算法+玻璃模压非均匀镜头,相比市面上200万像素摄像头,检测距离翻倍、分辨率更高。
同时,按照官宣信息,4个超级鱼眼摄像头,可以替代传统4个侧视+4个环视的高阶360度感知方案,支持大FOV视角以及80米的环视检测距离。
此外,Mobileye推出的SuperVision方案,也是类似搭载11个摄像头(7个远程+4个环视短程用于泊车辅助)全景传感器配置,2颗EyeQ5H芯片。
而此次法雷奥推出的鱼眼摄像头数据集,目的也正是鼓励开发者为鱼眼相机寻找适应计算机视觉算法的模型,而不是使用传统的校正算法。
二、
按照WoodScape数据集的官方介绍,鱼眼图像的原生视觉算法是目标之一。而在过去,鱼眼数据集很少,也几乎没有一个提供真正的语义分割注释。但,鱼眼尤其适用于低速场景,如泊车,只需四个摄像头就可以实现精确的全覆盖近场传感。
此外,目前针对鱼眼摄像头,还没有一个量产的,基于多摄像头组合的语义分割算法,大部分工作也都集中在独立解决个别任务上。目前,编码器是共享的,但解码器之间没有协同作用。
同时,现有的数据集主要是为了方便特定于任务的学习而设计的,并没有为所有的任务提供同时注释。而WoodScape数据集的另一个目标是为各种任务提供同时注释。
不过,从车辆采集公开数据集也面临数据隐私问题。而采用传统方法匿名化个人身份信息(如,人脸、车牌)会导致图像中的伪影,并可能对训练模型的质量产生负面影响。
为此,法雷奥基于AI的深度自然匿名化技术(DNAT),自动生成合成的、不可逆的替代数据(自动检测个人信息,并将其匿名化,同时保留图像的内容信息),测试结果显示,对模型训练的准确性没有显著的负面影响。
而为了保证数据的多样性,法雷奥基于不同车辆在欧洲不同地理位置的数据采集,场景包括高速公路、城市道路和停车场等。同时,所有传感器以及时间戳文件都提供了内部和外部校准,以实现数据的同步。
其中,鱼眼摄像头提供100万像素24位分辨率,30帧/秒,持续时间从30秒到120秒不等。该数据集还提供了一组使用真实相机的精确模型的合成数据,以及一个HDR传感器,带有滚动快门和120db的动态范围。
在弘景光电副总经理程芳陆看来,接下来环视相机兼容周视相机的方案,当环视相机的像素和视角、视距达到一定要求,即可满足人与车在低速场景下对车身近距离的视觉感知需求,该方案即降低了硬件成本,还能大幅节省算力成本。
为此,一些摄像头传感器芯片供应商也在发力。
比如,三星电子正式宣布推出一款专为高清环绕摄像头或后视摄像头优化的汽车图像传感器。这款名为“ISOCELL Auto 4AC”的新型图像传感器将用于今年下半年量产上车,也将可能搭载于特斯拉新车型。
三星表示,通过两个光电二极管同时捕捉不同曝光场景下的图像,确保高达120dB的高动态范围和最小的运动模糊,使黑暗和明亮区域之间的过渡更加平滑,同时保留更多的前方道路细节。
同时,对于目前中国市场兴起的行泊一体方案,基于摄像头功能复用,比如高级别自动驾驶的360度感知和预警,同时整合APA融合泊车,推动RPA、AVP的落地。