1. 三种激活函数——Sigmoid, Tanh, ReLU
1.1 Sigmoid
1.1.1 公式
S ( x ) = 1 1 + e − x S(x) = \frac{1}{1 + e^{-x}} S(x)=1+e−x1
1.1.2 导数
S ′ ( x ) = e − x ( 1 + e − x ) 2 = S ( x ) ( 1 − S ( x ) ) S'(x) = \frac{e^{-x}}{(1+e^{-x})^2} = S(x)(1-S(x)) S′(x)=(1+e−x)2e−x=S(x)(1−S(x))
1.1.3 函数图像
import matplotlib.pyplot as plt
import numpy as np
from matplotlib import rcParams
plt.figure(figsize=(12, 6))
config = {
"font.family": 'Times New Roman',
"font.size": 16,
"mathtext.fontset": 'stix',
"font.serif": ['Times New Roman'],
}
rcParams.update(config)
# Sigmoid
plt.subplot(1, 2, 1)
x = np.linspace(-3, 3, 100)
sigmoid = 1 / (1 + np.exp(-x))
plt.plot(x, sigmoid, label="Sigmoid")
# 刻度线
plt.plot([0, 0], [1, -0.2], c="k", ls=":", lw=1.5)
plt.plot([-3, 3], [0, 0], c="k", ls=":", lw=1.5)
plt.title("Sigmoid")
# Sigmoid的导函数
plt.subplot(1, 2, 2)
x = np.linspace(-3, 3, 100)
sigmoid_div = sigmoid * (1 - sigmoid)
plt.plot(x, sigmoid_div, label="Derivative of Sigmoid")
# 刻度线
plt.plot([0, 0], [0.25, -0.02], c="k", ls=":", lw=1.5)
plt.plot([-3, 3], [0, 0], c="k", ls=":", lw=1.5)
plt.title("Derivative of Sigmoid")
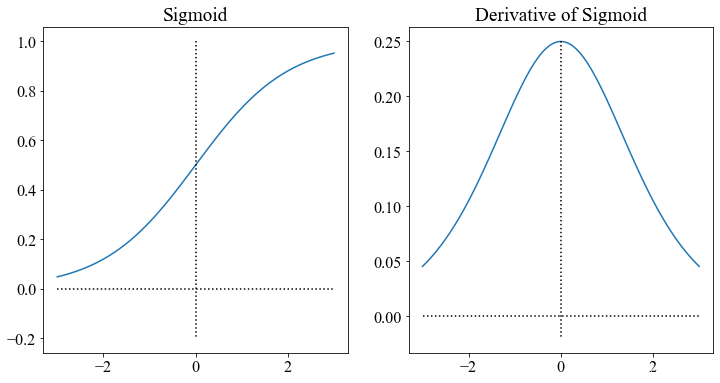
1.1.4 优点
- 实现简单,导数易获得。
- 输出在[0,1],所以可以用作输出层,表示概率。
- 最大熵模型,受噪声数据影响较小:
1.1.5 缺点
- 梯度饱和:指在sigmoid函数曲线的两段,(x>>0或x<<0)时,梯度接近0,从而在层级神经网络结构中,导致训练缓慢,以及梯度消失现象。
1.2 Tanh
Tanh的诞生比Sigmoid晚一些,Sigmoid函数我们提到过有一个缺点就是输出不以0为中心,使得收敛变慢的问题。而Tanh则就是解决了这个问题。
1.2.1 公式
tanh ( x ) = sinh ( x ) cosh ( x ) = e x − e − x e x + e − x \tanh(x) = \frac{\sinh (x)}{\cosh (x)} = \frac{e^x - e^{-x}}{e^x + e^{-x}} tanh(x)=cosh(x)sinh(x)=ex+e−xex−e−x
1.2.2 导数
tanh ′ ( x ) = 1 − tanh 2 ( x ) \tanh '(x) = 1 - \tanh ^2(x) tanh′(x)=1−tanh2(x)
1.2.3 函数图像
import matplotlib.pyplot as plt
import numpy as np
from matplotlib import rcParams
plt.figure(figsize=(12, 6))
config = {
"font.family": 'Times New Roman',
"font.size": 16,
"mathtext.fontset": 'stix',
"font.serif": ['Times New Roman'],
}
rcParams.update(config)
# Tanh
plt.subplot(1, 2, 1)
x = np.linspace(-3, 3, 100)
tanh = (np.exp(x) - np.exp(-x)) / (np.exp(x) + np.exp(-x))
plt.plot(x, tanh)
# 刻度线
plt.plot([0, 0], [1, -1], c="k", ls=":", lw=1.5)
plt.plot([-3, 3], [0, 0], c="k", ls=":", lw=1.5)
plt.title("Tanh")
# Tanh的导函数
plt.subplot(1, 2, 2)
x = np.linspace(-3, 3, 100)
tanh_div = 1 - tanh**2
plt.plot(x, tanh_div, label="Derivative of Tanh")
# 刻度线
plt.plot([0, 0], [1.1, -0.02], c="k", ls=":", lw=1.5)
plt.plot([-3, 3], [0, 0], c="k", ls=":", lw=1.5)
plt.title("Derivative of Tanh")

1.2.4 优点
- 解决了sigmoid函数收敛变慢的问题,相对于sigmoid提高了收敛速度。
- 因为Tanh和Sigmoid的导函数有上下界,所以完全不用担心因为使用激活函数而产生梯度爆炸的问题
1.2.5 缺点
- 指数的计算复杂。
- 梯度消失的问题依旧保留,因为两边的饱和性使得梯度消失,进而难以训练。
1.3 ReLU
1.3.1 公式
R e L U ( x ) = { x , x ≥ 0 0 , o t h e r w i s e \mathrm{ReLU} (x) = \begin{cases} x, & x\ge 0 \\ 0, & \mathrm{otherwise} \end{cases} ReLU(x)={ x,0,x≥0otherwise
1.3.2 导数
R e L U ( x ) = { 1 , x ≥ 0 0 , o t h e r w i s e \mathrm{ReLU} (x) = \begin{cases} 1, & x\ge 0 \\ 0, & \mathrm{otherwise} \end{cases} ReLU(x)={ 1,0,x≥0otherwise
1.3.3 函数图像
import matplotlib.pyplot as plt
import numpy as np
from matplotlib import rcParams
plt.figure(figsize=(10, 6))
config = {
"font.family": 'Times New Roman',
"font.size": 16,
"mathtext.fontset": 'stix',
"font.serif": ['Times New Roman'],
}
rcParams.update(config)
# ReLU
plt.subplot(1, 2, 1)
x = np.linspace(-3, 3, 100)
ReLU = np.maximum(0, x)
plt.plot(x, ReLU)
# 刻度线
plt.plot([0, 0], [3, -0.2], c="k", ls=":", lw=1.5)
plt.plot([-3, 3], [0, 0], c="k", ls=":", lw=1.5)
plt.title("ReLU")
# ReLU的导函数
plt.subplot(1, 2, 2)
x = np.linspace(-3, 3, 100)
ReLU_div = [1 if value >= 0 else 0 for value in x]
plt.plot(x, ReLU_div, label="Derivative of ReLU")
# 刻度线
plt.plot([0, 0], [1.1, -0.2], c="k", ls=":", lw=1.5)
plt.plot([-3, 3], [0, 0], c="k", ls=":", lw=1.5)
plt.title("Derivative of ReLU")
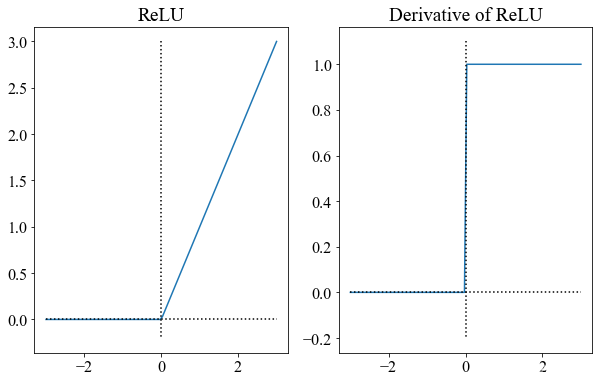
1.3.4 优点
- 没有饱和区,不存在梯度消失问题,防止梯度弥散;
- 稀疏性;
- 没有复杂的指数运算,计算简单、效率提高;
- 实际收敛速度较快,比 Sigmoid/tanh 快很多;
- 比 Sigmoid 更符合生物学神经激活机制。
1.3.5 缺点
就是训练的时候很”脆弱”,很容易就”die”了。

举个例子:一个非常大的梯度流过一个 ReLU 神经元,更新过参数之后,这个神经元再也不会对任何数据有激活现象了。如果这个情况发生了,那么这个神经元的梯度就永远都会是0。
实际操作中,如果你的learning rate 很大,那么很有可能你网络中的40%的神经元都”dead”了。 当然,如果你设置了一个合适的较小的learning rate,这个问题发生的情况其实也不会太频繁。
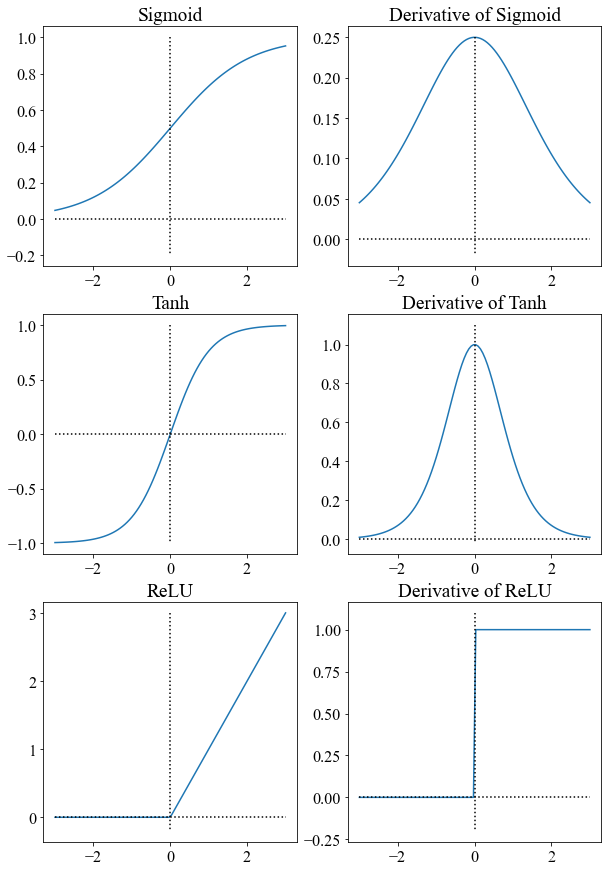
1.4 三种激活函数的图像
import matplotlib.pyplot as plt
import numpy as np
from matplotlib import rcParams
plt.figure(figsize=(10, 15))
config = {
"font.family": 'Times New Roman',
"font.size": 16,
"mathtext.fontset": 'stix',
"font.serif": ['Times New Roman'],
}
rcParams.update(config)
# Sigmoid
plt.subplot(3, 2, 1)
x = np.linspace(-3, 3, 100)
sigmoid = 1 / (1 + np.exp(-x))
plt.plot(x, sigmoid, label="Sigmoid")
# 刻度线
plt.plot([0, 0], [1, -0.2], c="k", ls=":", lw=1.5)
plt.plot([-3, 3], [0, 0], c="k", ls=":", lw=1.5)
plt.title("Sigmoid")
# Sigmoid的导函数
plt.subplot(3, 2, 2)
x = np.linspace(-3, 3, 100)
sigmoid_div = sigmoid * (1 - sigmoid)
plt.plot(x, sigmoid_div, label="Derivative of Sigmoid")
# 刻度线
plt.plot([0, 0], [0.25, -0.02], c="k", ls=":", lw=1.5)
plt.plot([-3, 3], [0, 0], c="k", ls=":", lw=1.5)
plt.title("Derivative of Sigmoid")
# Tanh
plt.subplot(3, 2, 3)
x = np.linspace(-3, 3, 100)
tanh = (np.exp(x) - np.exp(-x)) / (np.exp(x) + np.exp(-x))
plt.plot(x, tanh)
# 刻度线
plt.plot([0, 0], [1, -1], c="k", ls=":", lw=1.5)
plt.plot([-3, 3], [0, 0], c="k", ls=":", lw=1.5)
plt.title("Tanh")
# Tanh的导函数
plt.subplot(3, 2, 4)
x = np.linspace(-3, 3, 100)
tanh_div = 1 - tanh**2
plt.plot(x, tanh_div, label="Derivative of Tanh")
# 刻度线
plt.plot([0, 0], [1.1, -0.02], c="k", ls=":", lw=1.5)
plt.plot([-3, 3], [0, 0], c="k", ls=":", lw=1.5)
plt.title("Derivative of Tanh")
# ReLU
plt.subplot(3, 2, 5)
x = np.linspace(-3, 3, 100)
ReLU = np.maximum(0, x)
plt.plot(x, ReLU)
# 刻度线
plt.plot([0, 0], [3, -0.2], c="k", ls=":", lw=1.5)
plt.plot([-3, 3], [0, 0], c="k", ls=":", lw=1.5)
plt.title("ReLU")
# ReLU的导函数
plt.subplot(3, 2, 6)
x = np.linspace(-3, 3, 100)
ReLU_div = [1 if value >= 0 else 0 for value in x]
plt.plot(x, ReLU_div, label="Derivative of ReLU")
# 刻度线
plt.plot([0, 0], [1.1, -0.2], c="k", ls=":", lw=1.5)
plt.plot([-3, 3], [0, 0], c="k", ls=":", lw=1.5)
plt.title("Derivative of ReLU")
2. 卷积感受野计算
2.1 概念
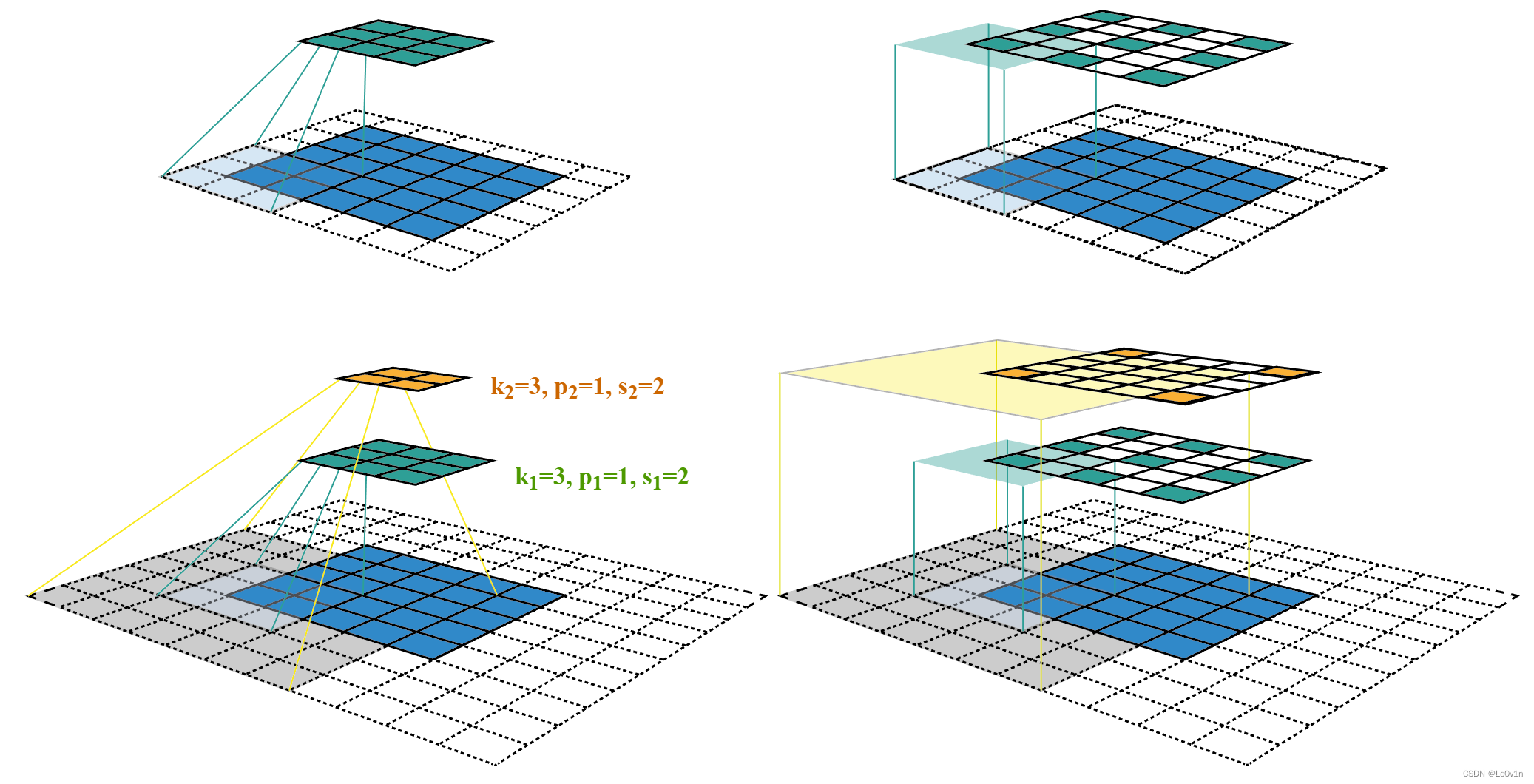
感受野(Receptive Field),指的是神经网络中神经元“看到的”输入区域,在卷积神经网络中,feature map上某个元素的计算受输入图像上某个区域的影响,这个区域即该元素的感受野。
卷积神经网络中,越深层的神经元看到的输入区域越大,如下图所示,kernel size 均为3×3,stride均为1,绿色标记的是Layer2 每个神经元看到的区域,黄色标记的是Layer3 看到的区域,具体地,Layer2每个神经元可看到Layer1 上 3×3 大小的区域,Layer3 每个神经元看到Layer2 上 3×3 大小的区域,该区域可以又看到Layer1 上 5×5 大小的区域。
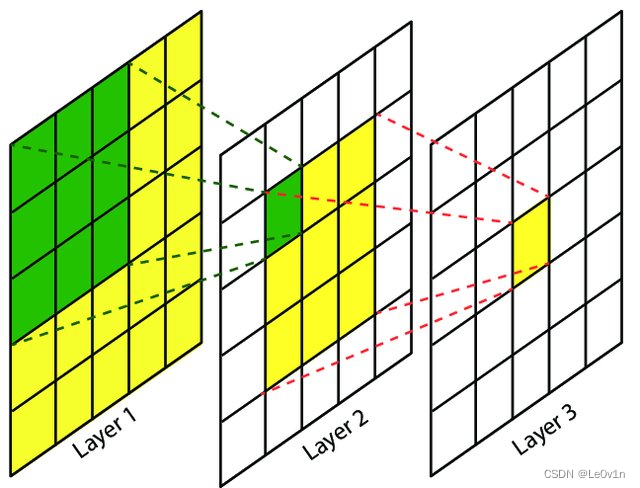
所以,感受野是个相对概念,某层feature map上的元素看到前面不同层上的区域范围是不同的,通常在不特殊指定的情况下,感受野指的是看到输入图像上的区域。
为了具体计算感受野,这里借鉴视觉系统中的概念,
r e c e p t i v e f i e l d = c e n t e r + s u r r o u n d \mathrm{ receptive \ field = center + surround } receptive field=center+surround
准确计算感受野,需要回答两个问题,即视野中心在哪和视野范围多大。
- 只有看到“合适范围的信息”才可能做出正确的判断,否则就可能“盲人摸象”或者“一览众山小”;
- 目标识别问题中,我们需要知道神经元看到是哪个区域,才能合理推断物体在哪以及判断是什么物体。
但是,网络架构多种多样,每层的参数配置也不尽相同,感受野具体该怎么计算?
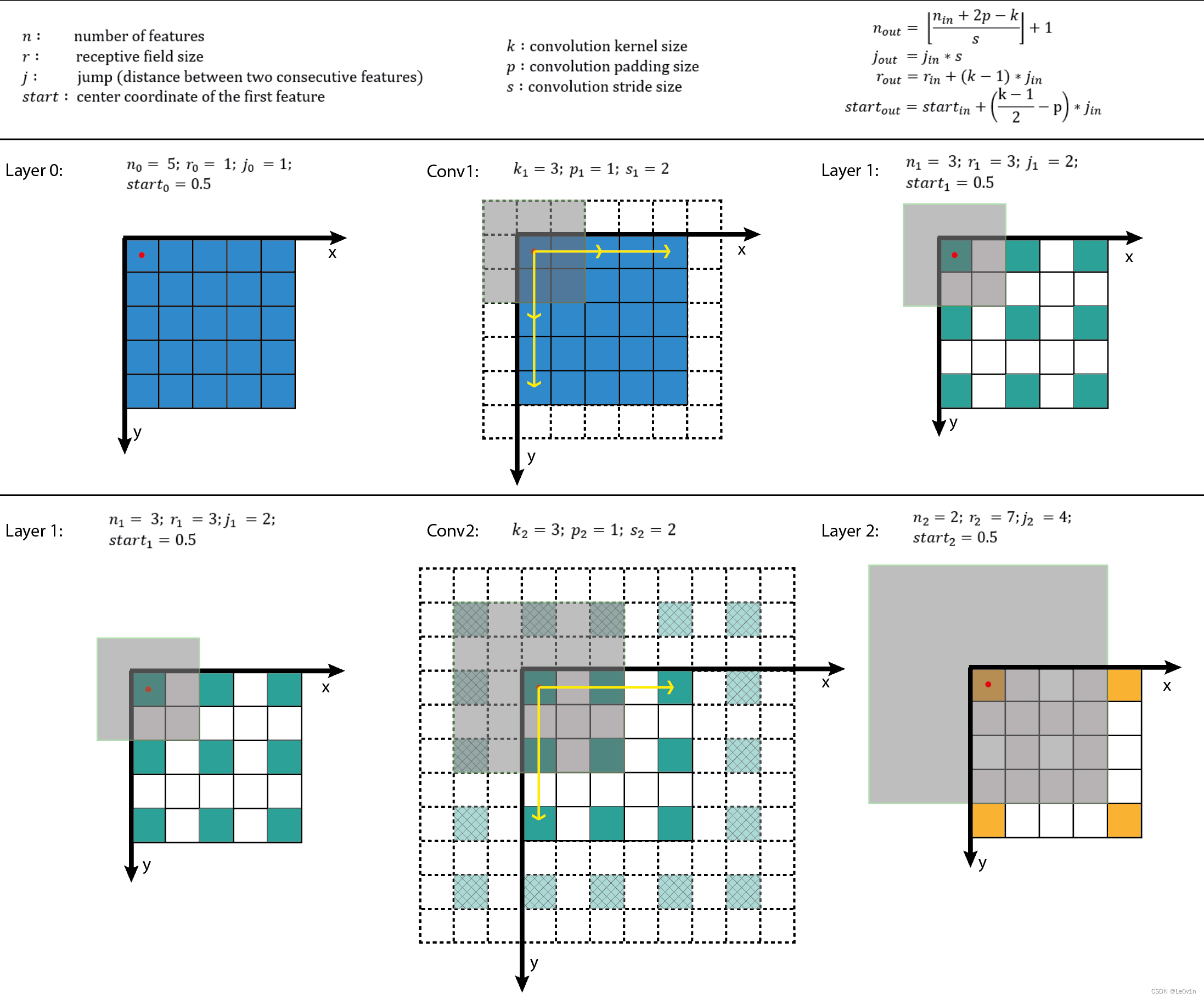
2.2 约定
在正式计算之前,先对数学符号做如下约定。
-
k k k:kernel size
-
p p p:padding size
-
s s s:stride size
-
L a y e r Layer Layer:用Layer表示feature map,特别地 L a y e r 0 Layer_0 Layer0 为输入图像;
-
C o n v Conv Conv:用Conv表示卷积, k 、 p 、 s k、p、s k、p、s为卷积层的超参数, C o n v l Conv_l Convl的输入和输出分别为 L a y e r l − 1 Layer_{l−1} Layerl−1 和 L a y e r l Layer_{l} Layerl;
-
n n n:feature map size为 n × n n×n n×n,这里假定 h e i g h t = w i d t h height=width height=width;
-
r r r:receptive field size为 r × r r×r r×r,这里假定感受野为正方形;
-
j j j:feature map上相邻元素间的像素距离,即将feature map上的元素与输入图像 L a y e r 0 Layer_0 Layer0上感受野的中心对齐后,相邻元素在输入图像上的像素距离,也可以理解为 feature map上前进 1 1 1步相当于输入图像上前进多少个像素,如下图所示,feature map上前进 1 1 1步,相当于输入图像上前进 2 2 2个像素, j = 2 j=2 j=2;

-
s t a r t start start:feature map左上角元素在输入图像上的感受野中心坐标 ( s t a r t , s t a r t ) (start,start) (start,start),即视野中心的坐标,在上图中,左上角绿色块感受野中心坐标为 ( 0.5 , 0.5 ) (0.5,0.5) (0.5,0.5),即左上角蓝色块中心的坐标,左上角白色虚线块中心的坐标为 ( − 0.5 , − 0.5 ) (−0.5,−0.5) (−0.5,−0.5);
-
l l l: l l l表示层,卷积层为 C o n v l Conv_l Convl,其输入feature map为 L a y e r l − 1 Layer_{l−1} Layerl−1,输出为 L a y e r l Layer_l Layerl。
下面假定所有层均为卷积层。
2.3 感受野大小
感受野大小的计算是个递推公式。
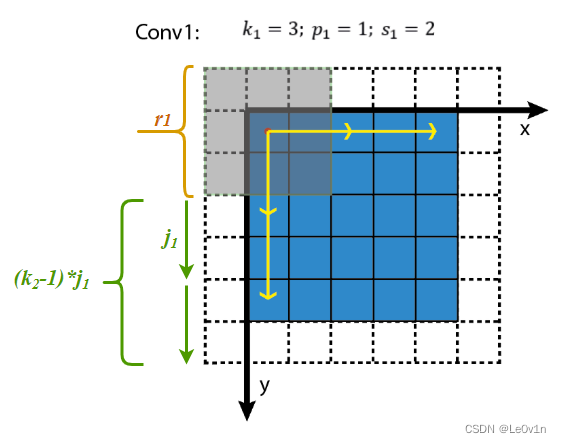
再看上面的动图,如果feature map L a y e r 2 Layer_2 Layer2 上的一个元素 A A A看到feature map L a y e r 1 Layer_1 Layer1 上的范围为 3 × 3 3×3 3×3(图中绿色块),其大小等于kernel size k 2 k_2 k2,所以, A A A看到的感受野范围 r 2 r_2 r2等价于 L a y e r 1 Layer_1 Layer1上 3 × 3 3×3 3×3窗口看到的 L a y e r 0 Layer_0 Layer0 范围,据此可以建立起相邻 L a y e r Layer Layer感受野的关系,如下所示,其中 r l r_l rl为 L a y e r l Layer_l Layerl的感受野, r l − 1 r_{l−1} rl−1为 L a y e r l − 1 Layer_{l−1} Layerl−1 的感受野,
r l = r l − 1 + ( k l − 1 ) × j l − 1 r_l = r_{l-1} + (k_l-1) \times j_{l - 1} rl=rl−1+(kl−1)×jl−1
- L a y e r l Layer_l Layerl:一个元素的感受野 r l r_l rl等价于 L a y e r l − 1 Layer_{l−1} Layerl−1 上 k × k k×k k×k 个感受野的叠加;
- L a y e r l − 1 Layer_{l−1} Layerl−1 上一个元素的感受野为 r l − 1 r_{l−1} rl−1;
- L a y e r l − 1 Layer_{l−1} Layerl−1 上连续 k k k个元素的感受野可以看成是,第1个元素看到的感受野加上剩余 k − 1 k−1 k−1步扫过的范围, L a y e r l − 1 Layer_{l−1} Layerl−1 上每前进1个元素相当于在输入图像上前进 j l − 1 j_l−1 jl−1个像素,结果等于 r l − 1 + ( k − 1 ) × j l − 1 r_l−1+(k−1)×j_l−1 rl−1+(k−1)×jl−1
可视化如下图所示,
下面的问题是, j i n j_{in} jin怎么求?
L a y e r l Layer_l Layerl 上前进1个元素相当于 L a y e r l − 1 Layer_{l−1} Layerl−1上前进 s l s_l sl个元素,转换成像素单位为
j l = j l − 1 × s l j_l=j_{l−1}×s_l jl=jl−1×sl
其中, s l s_l sl为Conv l的kernel在 L a y e r l − 1 Layer_{l−1} Layerl−1 上滑动的步长,输入图像的 s 0 = 1 s_0=1 s0=1。
根据递推公式可知,
j l = ∏ i = 1 l s i j_l=\prod^l_{i=1}s_i jl=i=1∏lsi
L a y e r l Layer_l Layerl上前进1个元素,相当于在输入图像前进了 ∏ i = 1 l \prod_{i=1}^l ∏i=1l个像素,即前面所有层 s t r i d e stride stride的连乘。
进一步可得, L a y e r l Layer_l Layerl的感受野大小为
r l = r l − 1 + ( k l − 1 ) ∗ j l − 1 = r l − 1 + ( ( k l − 1 ) × ∏ i = 1 l − 1 s i ) r_l = r_{l-1} + (k_l - 1) * j_{l-1} \\ = r_{l-1} + ((k_l - 1) \times \prod^{l-1}_{i=1}s_i) rl=rl−1+(kl−1)∗jl−1=rl−1+((kl−1)×i=1∏l−1si)
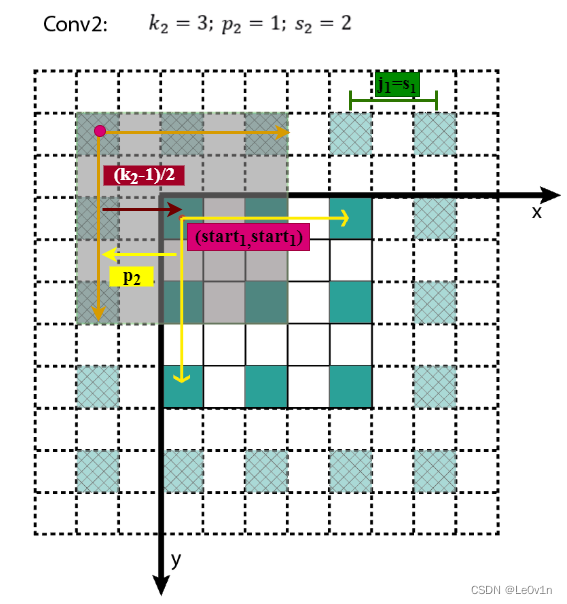
2.4 感受野中心
感受野中心的计算也是个递推公式。
在上一节中计算得 j l = ∏ i = 1 l s i j_l = \prod^l_{i=1}s_i jl=∏i=1lsi,表示feature map L a y e r l Layer_l Layerl上前进1个元素相当于在输入图像上前进的像素数目,如果将feature map上元素与感受野中心对齐,则 j l j_l jl为感受野中心之间的像素距离。如下图所示,
其中,各层的 k e r n e l s i z e 、 p a d d i n g 、 s t r i d e kernel size、padding、stride kernelsize、padding、stride超参数已在图中标出,右侧图为feature map和感受野中心对齐后的结果。
相邻 L a y e r Layer Layer间,感受野中心的关系为
s t a r t l = s t a r t l − 1 + ( k l − 1 2 − p l ) × j l − 1 start_l = start_{l-1} + (\frac{k_l-1}{2} - p_l) \times j_{l-1} startl=startl−1+(2kl−1−pl)×jl−1
所有的 s t a r t start start坐标均相对于输入图像坐标系。其中, s t a r t 0 = ( 0.5 , 0.5 ) start_0=(0.5,0.5) start0=(0.5,0.5),为输入图像左上角像素的中心坐标, s t a r t l − 1 start_{l−1} startl−1表示 L a y e r l − 1 Layer_{l−1} Layerl−1左上角元素的感受野中心坐标, ( k l − 1 2 − p l ) (\frac{k_l-1}{2} - p_l) (2kl−1−pl)为 L a y e r l Layer_l Layerl与 L a y e r l − 1 Layer_{l−1} Layerl−1感受野中心相对于 L a y e r l − 1 Layer_{l−1} Layerl−1坐标系的偏差,该偏差需折算到输入图像坐标系,其值需要乘上 j l − 1 j_{l−1} jl−1,即 L a y e r l − 1 Layer_{l−1} Layerl−1相邻元素间的像素距离,相乘的结果为 ( k l − 1 2 − p l ) × j l − 1 (\frac{k_l-1}{2} - p_l) \times j_{l-1} (2kl−1−pl)×jl−1,即感受野中心间的像素距离——相对输入图像坐标系。至此,相邻Layer间感受野中心坐标间的关系就不难得出了,这个过程可视化如下。
知道了 L a y e r l Layer_l Layerl左上角元素的感受野中心坐标 ( s t a r t l , s t a r t l ) (start_l,start_l) (startl,startl),通过该层相邻元素间的像素距离 j l j_l jl可以推算其他元素的感受野中心坐标。
2.5 小结
将感受野的相关计算小结一下,
j l = j l − 1 × s l j l = ∏ i = 1 l s I r l = r l − 1 + ( k l − 1 ) × j l − 1 = r l − 1 + ( ( k l − 1 ) × ∏ i = 1 l − 1 s i ) s t a r t l = s t a r t l − 1 + ( k l − 1 2 − p l ) × j l − 1 j_l = j_{l-1} \times s_l \\ j_l = \prod^l_{i=1}s_I \\ r_l = r_{l-1} + (k_l - 1) \times j_{l-1} \\ = r_{l-1} + ((k_l-1) \times \prod^{l-1}_{i=1}s_i) \\ start_l = start_{l-1} + (\frac{k_l-1}{2} - p_l) \times j_{l-1} jl=jl−1×sljl=i=1∏lsIrl=rl−1+(kl−1)×jl−1=rl−1+((kl−1)×i=1∏l−1si)startl=startl−1+(2kl−1−pl)×jl−1
由上面的递推公式,就可以从前向后逐层计算感受野了,代码可参见computeReceptiveField.py,在线可视化计算可参见Receptive Field Calculator。
最后,还有几点需要注意,
- L a y e r l Layer_l Layerl的感受野大小与 s l 、 p l s_l、p_l sl、pl无关,即当前feature map元素的感受野大小与该层相邻元素间的像素距离无关;
- 为了简化,通常将padding size设置为kernel的半径,即 p = k − 1 2 p=\frac{k-1}{2} p=2k−1,可得 s t a r t l = s t a r t l − 1 start_l=start_{l−1} startl=startl−1,使得feature map L a y e r l Layer_l Layerl 上 ( x , y ) (x,y) (x,y)位置的元素,其感受野中心坐标为 ( x j l , y j l ) (x_{j_l},y_{j_l}) (xjl,yjl);
- 对于空洞卷积dilated convolution,相当于改变了卷积核的尺寸,若含有dilation rate参数,只需将 k l k_l kl替换为 d i l a t i o n r a t e × ( k l − 1 ) + 1 dilation rate \times (k_l−1)+1 dilationrate×(kl−1)+1, d i l a t i o n r a t e = 1 dilation rate=1 dilationrate=1时为正常卷积;
- 对于pooling层,可将其当成特殊的卷积层,同样存在kernel size、padding、stride参数;
- 非线性激活层为逐元素操作,不改变感受野。
2.6 代码计算感受野
# [filter size, stride, padding]
#Assume the two dimensions are the same
#Each kernel requires the following parameters:
# - k_i: kernel size
# - s_i: stride
# - p_i: padding (if padding is uneven, right padding will higher than left padding; "SAME" option in tensorflow)
#
#Each layer i requires the following parameters to be fully represented:
# - n_i: number of feature (data layer has n_1 = imagesize )
# - j_i: distance (projected to image pixel distance) between center of two adjacent features
# - r_i: receptive field of a feature in layer i
# - start_i: position of the first feature's receptive field in layer i (idx start from 0, negative means the center fall into padding)
import math
convnet = [[11,4,0],[3,2,0],[5,1,2],[3,2,0],[3,1,1],[3,1,1],[3,1,1],[3,2,0],[6,1,0], [1, 1, 0]]
layer_names = ['conv1','pool1','conv2','pool2','conv3','conv4','conv5','pool5','fc6-conv', 'fc7-conv']
imsize = 227
def outFromIn(conv, layerIn):
n_in = layerIn[0]
j_in = layerIn[1]
r_in = layerIn[2]
start_in = layerIn[3]
k = conv[0]
s = conv[1]
p = conv[2]
n_out = math.floor((n_in - k + 2*p)/s) + 1
actualP = (n_out-1)*s - n_in + k
pR = math.ceil(actualP/2)
pL = math.floor(actualP/2)
j_out = j_in * s
r_out = r_in + (k - 1)*j_in
start_out = start_in + ((k-1)/2 - pL)*j_in
return n_out, j_out, r_out, start_out
def printLayer(layer, layer_name):
print(layer_name + ":")
print("\t n features: %s \n \t jump: %s \n \t receptive size: %s \t start: %s " % (layer[0], layer[1], layer[2], layer[3]))
layerInfos = []
if __name__ == '__main__':
#first layer is the data layer (image) with n_0 = image size; j_0 = 1; r_0 = 1; and start_0 = 0.5
print ("-------Net summary------")
currentLayer = [imsize, 1, 1, 0.5]
printLayer(currentLayer, "input image")
for i in range(len(convnet)):
currentLayer = outFromIn(convnet[i], currentLayer)
layerInfos.append(currentLayer)
printLayer(currentLayer, layer_names[i])
print ("------------------------")
layer_name = raw_input ("Layer name where the feature in: ")
layer_idx = layer_names.index(layer_name)
idx_x = int(raw_input ("index of the feature in x dimension (from 0)"))
idx_y = int(raw_input ("index of the feature in y dimension (from 0)"))
n = layerInfos[layer_idx][0]
j = layerInfos[layer_idx][1]
r = layerInfos[layer_idx][2]
start = layerInfos[layer_idx][3]
assert(idx_x < n)
assert(idx_y < n)
print ("receptive field: (%s, %s)" % (r, r))
print ("center: (%s, %s)" % (start+idx_x*j, start+idx_y*j))
2.7 计算题
题目:在CNN网络中,一张图经过核为 3 × 3 3\times 3 3×3,步长为2的卷积层,ReLU激活函数层,BN层,以及一个步长为2,核为 2 × 2 2\times 2 2×2的池化层后,再经过一个 3 × 3 3\times 3 3×3的的卷积层,步长为1,此时的感受野是多少?
r l = r l − 1 + ( k l − 1 ) × j l − 1 = r l − 1 + ( ( k l − 1 ) × ∏ i = 1 l − 1 s i ) \begin{aligned} r_l & = r_{l-1} + (k_l - 1) \times j_{l-1} \\ & = r_{l-1} + ((k_l -1) \times \prod^{l-1}_{i=1}s_i) \\ \end{aligned} rl=rl−1+(kl−1)×jl−1=rl−1+((kl−1)×i=1∏l−1si)
L 0 = 1 : 输 入 默 认 为 1 L 1 = 1 + ( 3 − 1 ) × ∏ i = 1 l − 1 s i = 1 + ( 3 − 1 ) × 1 = 3 : 1 ( 输 入 ) + ( 本 层 卷 积 核 大 小 − 1 ) × 之 前 层 步 长 连 乘 ( 输 入 默 认 为 1 ) L 2 = 3 + ( 2 − 1 ) × ∏ i = 1 l − 1 s i = 3 + ( 2 − 1 ) × 2 = 5 : 3 ( 上 一 层 感 受 野 ) + ( 本 层 卷 积 核 大 小 − 1 ) × 之 前 层 步 长 连 乘 ( 1 × 2 ) L 3 = 5 + ( 3 − 1 ) × ∏ i = 1 l − 1 s i = 5 + ( 3 − 1 ) × ( 2 × 2 ) = 13 : 5 ( 上 一 层 感 受 野 ) + ( 本 层 卷 积 核 大 小 − 1 ) × 之 前 层 步 长 连 乘 ( 1 × 2 × 2 ) \begin{aligned} & L_0 = 1 &:输入默认为1\\ & L_1 = 1 + (3-1)\times \prod^{l-1}_{i=1}s_i = 1 + (3-1) \times 1 = 3 &:1(输入)+(本层卷积核大小-1)×之前层步长连乘(输入默认为1)\\ & L_2 = 3 + (2-1) \times \prod^{l-1}_{i=1}s_i = 3 + (2-1) \times 2 = 5&:3(上一层感受野)+(本层卷积核大小-1)×之前层步长连乘(1\times 2)\\ & L_3 = 5 + (3-1) \times \prod^{l-1}_{i=1}s_i = 5 + (3-1) \times (2\times 2) = 13&:5(上一层感受野)+(本层卷积核大小-1)×之前层步长连乘(1\times 2\times2)\\ \end{aligned} L0=1L1=1+(3−1)×i=1∏l−1si=1+(3−1)×1=3L2=3+(2−1)×i=1∏l−1si=3+(2−1)×2=5L3=5+(3−1)×i=1∏l−1si=5+(3−1)×(2×2)=13:输入默认为1:1(输入)+(本层卷积核大小−1)×之前层步长连乘(输入默认为1):3(上一层感受野)+(本层卷积核大小−1)×之前层步长连乘(1×2):5(上一层感受野)+(本层卷积核大小−1)×之前层步长连乘(1×2×2)
- 对于pooling层,可将其当成特殊的卷积层,同样存在kernel size、padding、stride参数
- 非线性激活层为逐元素操作,不改变感受野
故此时的感受野大小为13。
参考
- https://www.cnblogs.com/shine-lee/p/12069176.html