理论基础
说实话,讲理论基础实在不是我的强项,但是还是得硬着头皮来讲,希望我的讲解不至于晦涩难懂。
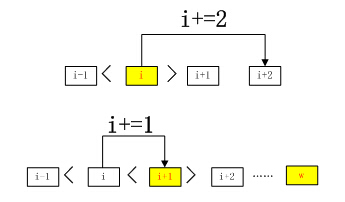
非极大值抑制,简称为NMS算法。是一种获取局部最大值的有效方法。在3领域中,假设一个行向量的长度为w,从左向右,由第一个到第w个和其3领域中的数值进行比对。
如果某个i大于i+1并且小于i-1,则其为一个绝不最大值,同时也就意味着i+1不是一个局部最大值,所以将i移动2个步长,从i+2开始继续向后进行比较判断。如果某个i不满足上述条件,则将i+1,继续对i+1进行比对。当比对到最后一个w时,直接将w设置为局部最大值。算法流程如下图所示。
应用范围
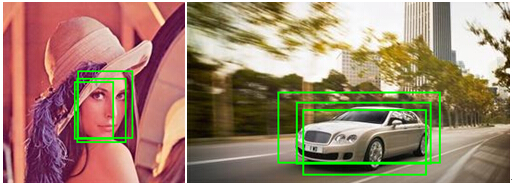
非极大值抑制NMS在目标检测,定位等领域是一种被广泛使用的方法。对于目标具体位置定位过程,不管是使用sw(sliding Window)还是ss(selective search)方法,都会产生好多的候选区域。实际看到的情形就是好多区域的交叉重叠,难以满足实际的应用。如下图所示。
针对该问题有3种传统的解决思路。
第一种,选取好多矩形框的交集,即公共区域作为最后的目标区域。
第二种,选取好多矩形框的并集,即所有矩形框的最小外截矩作为目标区域。当然这里也不是只要相交就直接取并集,需要相交的框满足交集占最小框的面积达到一定比例(也就是阈值)才合并。
第三种,也就是本文的NMS,简单的说,对于有相交的就选取其中置信度最高的一个作为最后结果,对于没相交的就直接保留下来,作为最后结果。
总体来说,3种处理思路都各有千秋,不能一概评论哪种好坏。各种顶会论文也会选择不同的处理方法。
程序实现
本文提供了nonMaximumSuppression的c语言,c++,M语言,三个版本。
其中,c语言版本为opencv的源码这里摘出并进行相关的注释。sort为排序函数,这里是最基本的选择排序算法的实现。nonMaximumSuppression为具体非极大值抑制的实现。
- static void sort(int n, const float* x, int* indices)
- {
-
-
-
- int i, j;
- for (i = 0; i < n; i++)
- for (j = i + 1; j < n; j++)
- {
- if (x[indices[j]] > x[indices[i]])
- {
-
- int index_tmp = indices[i];
-
- indices[i] = indices[j];
-
- indices[j] = index_tmp;
- }
- }
- }
- int nonMaximumSuppression(int numBoxes, const CvPoint *points,
- const CvPoint *oppositePoints, const float *score,
- float overlapThreshold,
- int *numBoxesOut, CvPoint **pointsOut,
- CvPoint **oppositePointsOut, float **scoreOut)
- {
-
-
-
-
-
- int i, j, index;
- float* box_area = (float*)malloc(numBoxes * sizeof(float));
- int* indices = (int*)malloc(numBoxes * sizeof(int));
- int* is_suppressed = (int*)malloc(numBoxes * sizeof(int));
-
- for (i = 0; i < numBoxes; i++)
- {
- indices[i] = i;
- is_suppressed[i] = 0;
- box_area[i] = (float)( (oppositePoints[i].x - points[i].x + 1) *
- (oppositePoints[i].y - points[i].y + 1));
- }
-
- sort(numBoxes, score, indices);
- for (i = 0; i < numBoxes; i++)
- {
- if (!is_suppressed[indices[i]])
- {
- for (j = i + 1; j < numBoxes; j++)
- {
- if (!is_suppressed[indices[j]])
- {
- int x1max = max(points[indices[i]].x, points[indices[j]].x);
- int x2min = min(oppositePoints[indices[i]].x, oppositePoints[indices[j]].x);
- int y1max = max(points[indices[i]].y, points[indices[j]].y);
- int y2min = min(oppositePoints[indices[i]].y, oppositePoints[indices[j]].y);
- int overlapWidth = x2min - x1max + 1;
- int overlapHeight = y2min - y1max + 1;
- if (overlapWidth > 0 && overlapHeight > 0)
- {
- float overlapPart = (overlapWidth * overlapHeight) / box_area[indices[j]];
- if (overlapPart > overlapThreshold)
- {
- is_suppressed[indices[j]] = 1;
- }
- }
- }
- }
- }
- }
-
- *numBoxesOut = 0;
- for (i = 0; i < numBoxes; i++)
- {
- if (!is_suppressed[i]) (*numBoxesOut)++;
- }
-
- *pointsOut = (CvPoint *)malloc((*numBoxesOut) * sizeof(CvPoint));
- *oppositePointsOut = (CvPoint *)malloc((*numBoxesOut) * sizeof(CvPoint));
- *scoreOut = (float *)malloc((*numBoxesOut) * sizeof(float));
- index = 0;
- for (i = 0; i < numBoxes; i++)
- {
- if (!is_suppressed[indices[i]])
- {
- (*pointsOut)[index].x = points[indices[i]].x;
- (*pointsOut)[index].y = points[indices[i]].y;
- (*oppositePointsOut)[index].x = oppositePoints[indices[i]].x;
- (*oppositePointsOut)[index].y = oppositePoints[indices[i]].y;
- (*scoreOut)[index] = score[indices[i]];
- index++;
- }
-
- }
-
- free(indices);
- free(box_area);
- free(is_suppressed);
-
- return LATENT_SVM_OK;
- }
c++版本程序如下所示,根据opencv源码改编,vs2010实测运行完美。由于c和c++版本基本一个思路,因此将这两个的思路一起讲解。
整体程序分为两部分,sort函数主要实现候选框的置信度从高到低的排序,是基于基本的选择排序实现。nonMaximumSuppression主要实现非极大值抑制算法。算法思路为,先根据候选框的points 和oppositePoints 求出每个候选框的面积box_area,并将标签is_suppressed全部置为0。通过一个二重for循环将所有的候选框进行比对,这里的循环是从置信度最高的窗口进行比对,每层外循环中置信度最高的保留,其余的只要大于规定阈值overlapThreshold就舍弃,不大于阈值的保留下来。最终输出NMS处理后的结果。
- static void sort(int n, const vector<float> x, vector<int> indices)
- {
-
-
-
- int i, j;
- for (i = 0; i < n; i++)
- for (j = i + 1; j < n; j++)
- {
- if (x[indices[j]] > x[indices[i]])
- {
-
- int index_tmp = indices[i];
-
- indices[i] = indices[j];
-
- indices[j] = index_tmp;
- }
- }
- }
- int nonMaximumSuppression(int numBoxes, const vector<CvPoint> points,const vector<CvPoint> oppositePoints,
- const vector<float> score, float overlapThreshold,int& numBoxesOut, vector<CvPoint>& pointsOut,
- vector<CvPoint>& oppositePointsOut, vector<float> scoreOut)
- {
-
-
-
-
- int i, j, index;
- vector<float> box_area(numBoxes);
- vector<int> indices(numBoxes);
- vector<int> is_suppressed(numBoxes);
-
- for (i = 0; i < numBoxes; i++)
- {
- indices[i] = i;
- is_suppressed[i] = 0;
- box_area[i] = (float)( (oppositePoints[i].x - points[i].x + 1) *(oppositePoints[i].y - points[i].y + 1));
- }
-
- sort(numBoxes, score, indices);
- for (i = 0; i < numBoxes; i++)
- {
- if (!is_suppressed[indices[i]])
- {
- for (j = i + 1; j < numBoxes; j++)
- {
- if (!is_suppressed[indices[j]])
- {
- int x1max = max(points[indices[i]].x, points[indices[j]].x);
- int x2min = min(oppositePoints[indices[i]].x, oppositePoints[indices[j]].x);
- int y1max = max(points[indices[i]].y, points[indices[j]].y);
- int y2min = min(oppositePoints[indices[i]].y, oppositePoints[indices[j]].y);
- int overlapWidth = x2min - x1max + 1;
- int overlapHeight = y2min - y1max + 1;
- if (overlapWidth > 0 && overlapHeight > 0)
- {
- float overlapPart = (overlapWidth * overlapHeight) / box_area[indices[j]];
- if (overlapPart > overlapThreshold)
- {
- is_suppressed[indices[j]] = 1;
- }
- }
- }
- }
- }
- }
-
- numBoxesOut = 0;
- for (i = 0; i < numBoxes; i++)
- {
- if (!is_suppressed[i]) numBoxesOut++;
- }
- index = 0;
- for (i = 0; i < numBoxes; i++)
- {
- if (!is_suppressed[indices[i]])
- {
- pointsOut.push_back(Point(points[indices[i]].x,points[indices[i]].y));
- oppositePointsOut.push_back(Point(oppositePoints[indices[i]].x,oppositePoints[indices[i]].y));
- scoreOut.push_back(score[indices[i]]);
- index++;
- }
-
- }
-
- return true;
- }
matlab版本的程序只有1个函数nms。
程序参数说明:
boxes为输入的矩形框,overlap为设置的一个阈值,pick为NMS处理后的输出矩阵在boxes中的对应位置。
box中存放的数据格式如下:
| 第一列 |
第二列 |
第三列 |
第四列 |
第五列 |
第六列 |
…… |
左上角x |
左上角y |
右下角x |
右下角y |
置信度 |
置信度 |
…… |
| …… |
…… |
…… |
…… |
…… |
…… |
…… |
程序整体思路:
先将box中的数据分别存入x1,y1,x2,y2,s中,分别为坐标和置信度,算出每个框的面积,存入area,基于置信度s,从小到达进行排序,做一个while循环,取出置信度最高的,即排序后的最后一个,然后将该框进行保留,存入pick中,然后和其他所有的框进行比对,大于规定阈值就将别的框去掉,并将该置信度最高的框和所有比对过程,大于阈值的框存入suppress,for循环后,将I中满足suppress条件的置为空。直到I为空退出while。
简单的说,就是比如图像中有4个位置出现框的交叉重叠,每一次while循环都会去掉一个位置的交叉框,留下置信度最高的那个。while循环负责4个位置的循环,for循环负责每个位置交叉框的循环。
- function pick = nms(boxes, overlap)
-
- % pick = nms(boxes, overlap)
- % Non-maximum suppression.
- % Greedily select high-scoring detections and skip detections
- % that are significantly covered by a previously selected detection.
-
- if isempty(boxes)
- pick = [];
- else
- x1 = boxes(:,1); %所有候选框的左上角顶点x
- y1 = boxes(:,2); %所有候选框的左上角顶点y
- x2 = boxes(:,3); %所有候选框的右下角顶点x
- y2 = boxes(:,4); %所有候选框的右下角顶点y
- s = boxes(:,end); %所有候选框的置信度,可以包含1列或者多列,用于表示不同准则的置信度
- area = (x2-x1+1) .* (y2-y1+1);%所有候选框的面积
-
- [vals, I] = sort(s); %将所有候选框进行从小到大排序,vals为排序后结果,I为排序后标签
- pick = [];
- while ~isempty(I)
- last = length(I); %last代表标签I的长度,即最后一个元素的位置,(matlab矩阵从1开始计数)
- i = I(last); %所有候选框的中置信度最高的那个的标签赋值给i
- pick = [pick; i]; %将i存入pick中,pick为一个列向量,保存输出的NMS处理后的box的序号
- suppress = [last]; %将I中最大置信度的标签在I中位置赋值给suppress,suppress作用为类似打标志,
- %存入suppress,证明该元素处理过
- for pos = 1:last-1 %从1到倒数第二个进行循环
- j = I(pos); %得到pos位置的标签,赋值给j
- xx1 = max(x1(i), x1(j));%左上角最大的x(求两个方框的公共区域)
- yy1 = max(y1(i), y1(j));%左上角最大的y
- xx2 = min(x2(i), x2(j));%右下角最小的x
- yy2 = min(y2(i), y2(j));%右下角最小的y
- w = xx2-xx1+1; %公共区域的宽度
- h = yy2-yy1+1; %公共区域的高度
- if w > 0 && h > 0 %w,h全部>0,证明2个候选框相交
- o = w * h / area(j);%计算overlap比值,即交集占候选框j的面积比例
- if o > overlap %如果大于设置的阈值就去掉候选框j,因为候选框i的置信度最高
- suppress = [suppress; pos];%大于规定阈值就加入到suppress,证明该元素被处理过
- end
- end
- end
- I(suppress) = [];%将处理过的suppress置为空,当I为空结束循环
- end
- end
这里给出2个最简单基本的c++和matlab相应的测试程序。
c++测试程序如下:
- int main()
- {
- Mat image=Mat::zeros(600,600,CV_8UC3);
- int numBoxes=4;
- vector<CvPoint> points(numBoxes);
- vector<CvPoint> oppositePoints(numBoxes);
- vector<float> score(numBoxes);
-
- points[0]=Point(200,200);oppositePoints[0]=Point(400,400);score[0]=0.99;
- points[1]=Point(220,220);oppositePoints[1]=Point(420,420);score[1]=0.9;
- points[2]=Point(100,100);oppositePoints[2]=Point(150,150);score[2]=0.82;
- points[3]=Point(200,240);oppositePoints[3]=Point(400,440);score[3]=0.5;
-
- float overlapThreshold=0.8;
- int numBoxesOut;
- vector<CvPoint> pointsOut;
- vector<CvPoint> oppositePointsOut;
- vector<float> scoreOut;
-
- nonMaximumSuppression( numBoxes,points,oppositePoints,score,overlapThreshold,numBoxesOut,pointsOut,oppositePointsOut,scoreOut);
- for (int i=0;i<numBoxes;i++)
- {
- rectangle(image,points[i],oppositePoints[i],Scalar(0,255,255),6);
- char text[20];
- sprintf(text,"%f",score[i]);
- putText(image,text,points[i],CV_FONT_HERSHEY_COMPLEX, 1,Scalar(0,255,255));
- }
- for (int i=0;i<numBoxesOut;i++)
- {
- rectangle(image,pointsOut[i],oppositePointsOut[i],Scalar(0,0,255),2);
- }
-
- imshow("result",image);
-
- waitKey();
- return 0;
- }
matlab测试程序如下:
- boxes=[200,200,400,400,0.99;
- 220,220,420,420,0.9;
- 100,100,150,150,0.82;
- 200,240,400,440,0.5];
- overlap=0.8;
- pick = nms(boxes, overlap);
- figure;
- for (i=1:size(boxes,1))
- rectangle('Position',[boxes(i,1),boxes(i,2),boxes(i,3)-boxes(i,1),boxes(i,4)-boxes(i,2)],'EdgeColor','y','LineWidth',6);
- text(boxes(i,1),boxes(i,2),num2str(boxes(i,5)),'FontSize',14,'color','b');
- end
- for (i=1:size(pick,1))
- rectangle('Position',[boxes(pick(i),1),boxes(pick(i),2),boxes(pick(i),3)-boxes(pick(i),1),boxes(pick(i),4)-boxes(pick(i),2)],'EdgeColor','r','LineWidth',2);
- end
- axis([0 600 0 600]);
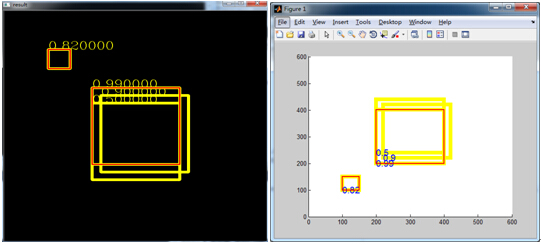
实验结果
c++和Matlab的测试结果如下所示,其中,红色框为经过NMS处理后的结果,黄色框为原始的输入框。从图中可以看出,经过NMS处理后的候选框中,在重叠部分大于规定阈值的都被舍弃,只保留其中置信度最高的一个,而对于没有重叠的框,不管其置信度多少,都直接保留下来。
注意,在matlab,opencv里面图像左上角为坐标原点,而本文在matlab中是单纯画图,此时图像左下角为坐标原点,所以同样的坐标,两幅图效果有所区别。
本文所有程序github下载链接https://github.com/watersink/nonMaximumSuppression,希望本文对大家有帮助。