stamps的结果可视化手段有很多,本质就是把点展在地图上
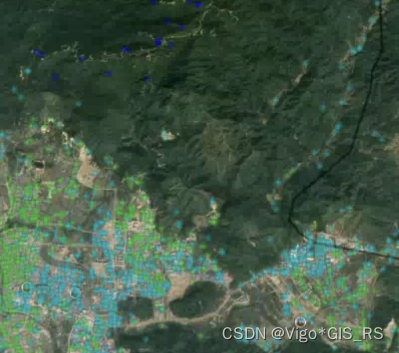
上次使用StaMPS_Visualizer展点,感觉效果很好,但StaMPS_Visualizer的底图是二维平面的,没有地形信息,因此有一定的局限性。在Google earth上面则可以使用具有地形信息的地图。
将数据导出为kml
ps_plot('vs-dao', 'a_linear', -1)
% 画出vs-dao并保存,a表示大气相位去除,linear是train方法,-1表示保存
load ps_plot_vs-dao ph_disp
% 加载上面保存的数据
ps_gescatter('LNcity_ps.kml',ph_disp,1,0.4,[-10,10],[114.7,115.0],[24.8,25.0])
% 保存为kml格式,'LNcity_ps.kml'为数据名称,ph_disp为内容,1表示点位间隔,1就是保存全部的点,10就是每10个点保留1个,
% 0.4是点的丰满程度,[-10,10]表示点取值范围,后面的经纬度表示点位空间范围,注意一定是经度在前纬度在后。