讲师是《学习OpenCV4:基于Python的算法实战》和《深度学习计算机视觉实战》两本图书的作者,目前从事自动驾驶感知融合算法开发,分享内容包括深度学习、计算机视觉、OpenCV、自动驾驶、SLAM、C++/Python语言开发等方向的内容。
OpenCV课程地址:
OpenCV入门精讲
C++课程地址:
C++学习进阶
欢迎关注公众号“计算机视觉与OpenCV”
欢迎添加我的微信号study428加入学习交流群。
4、简要介绍一下回环检测
回环检测,又称闭环检测,是指机器人识别曾到达某场景,使得地图闭环的能力。在SLAM建图过程中,位姿的估计仅考虑相邻时间上的关键帧,在这期间产生的误差会逐步累积,形成累积误差。这样长期估计的的结果将不可靠。所以通过回环检测方法,发现潜在的回环,用它修正漂移误差可构建全局一致的轨迹和地图。
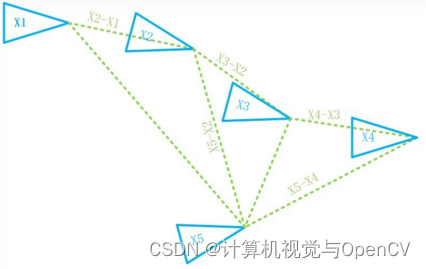
回环检测判断机器人是否回到了先前经过的位置,如果检测到回环,它会把信息传递给后端进行优化处理。回环是一个比后端更加紧凑、准确的约束,这一约束条件可以形成一个拓扑一致的轨迹地图。如果能够检测到闭环,并对其优化,就可以让结果更加准确。
回环检测方法可根据传感器类型分类,依靠激光雷达、相机、GPS和毫米波雷达的信息来检测可能的回环。如把激光雷达点云转化成一个描述子,然后比较描述子的相似度,来发现可能的回环;或者在照片上提取特征点,然后建立词袋模型的方法;以及通过GPS提供的地理位置信息来检验是否回到先前的位置。近些年来,随着深度学习方法的崛起,不少深度学习模型也运用到了回环检测之中,如OverlapTranformer,它利用了Transformer结构让回环检测性能提升。所以从算法角度上,回环检测方法又可以分成两类:描述子法和深度学习模型法。
5、自动驾驶相关的数据集有哪些?
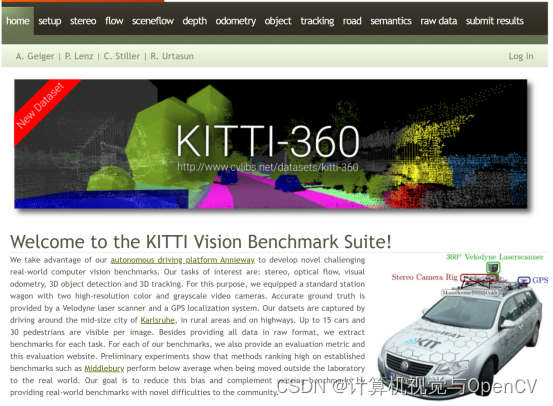
(1)KITTI数据集
http://www.cvlibs.net/datasets/kitti/index.php(RGB+Lidar+GPS+IMU)
KITTI数据集由德国卡尔斯鲁厄理工学院和丰田美国技术研究院联合创办,是目前国际上最大的自动驾驶场景下的计算机视觉算法评测数据集。该数据集用于评测立体图像 (stereo),光流 (optical flow),视觉里程计(visual odometry),3D物体检测 (object detection) 和 3D跟踪 (tracking)等计算机视觉技术在车载环境下的性能。KITTI包含市区、乡村和高速公路等场景采集的真实图像数据,每张图像中最多达15辆车和30个行人,还有各种程度的遮挡与截断。
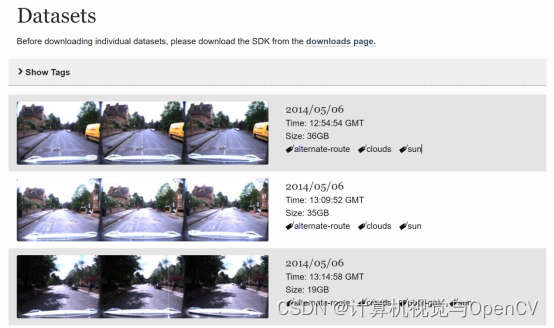
(2)Oxford数据集
http://robotcar-dataset.robots.ox.ac.uk/datasets/(RGB+Lidar+GPS+IMU)
该数据集对牛津的一部分连续的道路进行了上百次数据采集,收集到了多种天气行人和交通情况下的数据,也有建筑和道路施工时的数据,总的数据长度达1000小时以上。
(3)其他自动驾驶相关数据集有:
Cityscape, Comma.ai, BDDV, TORCS, Udacity, GTA, CARLA, Carcraft