1 为什么学习变换 Why study transformation
1.1 模型变换 Modeling
- 场景展示——描述摄像机的位置移动
- 机器人跳舞——物体的旋转
- 皮克斯开场动画台灯压扁字母I——物体的缩放
1.2 视图变换 Viewing
- 光栅化成像中涉及大量的视图变换

2 二维变换 2D Transformations
3B1B线代的本质(可视化理解线性变换):https://www.bilibili.com/video/BV1ns41167b9?spm_id_from=333.999.0.0
2.1 缩放变换矩阵 Scale Matrix
- 不锁定比例的 Non-Uniform

( x ′ y ′ ) = ( s x 0 0 s y ) ( x y ) \begin{pmatrix} { } { x ^ { \prime } } \\ { y ^ { \prime } } \end{pmatrix} = \begin{pmatrix} { } { s _ { x } } & { 0 } \\ { 0 } & { s _ { y } } \end{pmatrix} \begin{pmatrix} { } { x } \\ { y } \end{pmatrix} (x′y′)=(sx00sy)(xy)
2.2 对称变换矩阵 Reflection Matrix
- 水平翻转 Horizontal reflection:

( x ′ y ′ ) = ( − 1 0 0 1 ) ( x y ) \begin{pmatrix} { } { x ^ { \prime } } \\ { y ^ { \prime } } \end{pmatrix} = \begin{pmatrix} { } { - 1 } & { 0 } \\ { 0 } & { 1 } \end{pmatrix} \begin{pmatrix} { } { x } \\ { y } \end{pmatrix} (x′y′)=(−1001)(xy)
2.3 切变变换矩阵 Shear Matrix
- 水平方向位移在y=0处是0,在y=1处是a,竖直方向位移总是0

( x ′ y ′ ) = ( 1 a 0 1 ) ( x y ) \begin{pmatrix} { } { x ^ { \prime } } \\ { y ^ { \prime } } \end{pmatrix} = \begin{pmatrix} { } { 1 } & { a } \\ { 0 } & { 1 } \end{pmatrix} \begin{pmatrix} { } { x } \\ { y } \end{pmatrix} (x′y′)=(10a1)(xy)
2.4 旋转变换矩阵(默认绕原点、逆时针方向) Rotation Matrix
- 旋转的角度为θ

R θ = ( cos θ − sin θ sin θ cos θ ) R _ { \theta } = \begin{pmatrix} { } { \cos \theta } & { -\sin \theta } \\ { \sin \theta } & { \cos \theta } \end{pmatrix} Rθ=(cosθsinθ−sinθcosθ)
2.5 线性变换 Linear Transforms
- 使用相同维度的矩阵相乘,形式为坐标与矩阵相乘得到新的坐标
( x ′ y ′ ) = ( a b c d ) ( x y ) \begin{pmatrix} { } { x ^ { \prime } } \\ { y ^ { \prime } } \end{pmatrix} = \begin{pmatrix} { } { a } & { b } \\ { c } & { d } \end{pmatrix} \begin{pmatrix} { } { x } \\ { y } \end{pmatrix} (x′y′)=(acbd)(xy)
3 齐次坐标 Homogeneous Coordinates
3.1 为什么学习齐次坐标 Why homogeneous coordinates
- 平移变换不是线性变换,无法直接用矩阵形式表示

( x ′ y ′ ) = ( a b c d ) ( x y ) + ( t x t y ) \begin{pmatrix} { } { x ^ { \prime } } \\ { y ^ { \prime } } \end{pmatrix} = \begin{pmatrix} { } { a } & { b } \\ { c } & { d } \end{pmatrix} \begin{pmatrix} { } { x } \\ { y } \end{pmatrix} + \begin{pmatrix} { } { t _ { x } } \\ { t y } \end{pmatrix} (x′y′)=(acbd)(xy)+(txty)
- 我们不想把平移当作一个特殊的变换 But we don’t want translation to be a special case
- 是否有一种统一的方式能够表示所有变换,它的代价怎么样? Is there a unified way to represent all transformations? (and what’s the cost?)
3.2 通过齐次坐标解决问题 Solution: Homogenous Coordinates
3.2.1 添加第三个坐标 Add a third coordinate (w-coordinate)
2 D p o i n t = ( x , y , 1 ) T , 2 D v e c t o r = ( x , y , 0 ) T \rm{2D\,point}=(x,y,1)^T,\quad\rm{2D\,vector}=(x,y,0)^T 2Dpoint=(x,y,1)T,2Dvector=(x,y,0)T
3.2.2 平移的矩阵表示 Matrix representation of translations
( x ′ y ′ w ′ ) = ( 1 0 t x 0 1 t y 0 0 1 ) ⋅ ( x y 1 ) = ( x + t x y + t y 1 ) \begin{pmatrix} { } { x ^ { \prime } } \\ { y ^ { \prime } } \\ { w ^ { \prime } } \end{pmatrix} = \begin{pmatrix} { } { 1 } & { 0 } & { t_x } \\ { 0 } & { 1 } & { t_y } \\ { 0 } & { 0 } & { 1 } \end{pmatrix}\cdot\begin{pmatrix} { } { x } \\ { y } \\ { 1 } \end{pmatrix} = \begin{pmatrix} { } { x + t_x } \\ { y + t_y } \\ { 1 } \end{pmatrix} ⎝⎛x′y′w′⎠⎞=⎝⎛100010txty1⎠⎞⋅⎝⎛xy1⎠⎞=⎝⎛x+txy+ty1⎠⎞
3.2.3 如果平移的是一个向量? What if you translate a vector?
- 向量具有平移不变性,经过平移变换后还是原向量
( x ′ y ′ w ′ ) = ( 1 0 t x 0 1 t y 0 0 1 ) ⋅ ( x y 0 ) = ( x y 0 ) \begin{pmatrix} { } { x ^ { \prime } } \\ { y ^ { \prime } } \\ { w ^ { \prime } } \end{pmatrix} = \begin{pmatrix} { } { 1 } & { 0 } & { t_x } \\ { 0 } & { 1 } & { t_y } \\ { 0 } & { 0 } & { 1 } \end{pmatrix}\cdot\begin{pmatrix} { } { x } \\ { y } \\ { 0 } \end{pmatrix} = \begin{pmatrix} { } { x } \\ { y } \\ { 0 } \end{pmatrix} ⎝⎛x′y′w′⎠⎞=⎝⎛100010txty1⎠⎞⋅⎝⎛xy0⎠⎞=⎝⎛xy0⎠⎞
3.2.4 齐次坐标的妙处
- 如果w-coordinate的结果是1或0则为有效操作,这样既能让平移变换形式统一,也保留了向量和点加减运算的可操作性
- 使用齐次坐标时,(x, y, w)表示平面内一点(x/w, y/w, 1), w≠0
- vector + vector = vector 0+0=0
- point – point = vector 1-1=0
- point + vector = point 1+0=1
- point + point = ??
point+point得到的结果为两个点连线的中点(将w-coordinate化为1)
3.2.5 仿射变换 Affine Transformations
- 仿射变换 = 线性变换 + 平移变换 Affine map = linear map + translation
( x ′ y ′ ) = ( a b c d ) ⋅ ( x y ) + ( t x t y ) \begin{pmatrix} { } { x ^ { \prime } } \\ { y ^ { \prime } } \end{pmatrix} = \begin{pmatrix} { } { a } & { b } \\ { c } & { d } \end{pmatrix} \cdot \begin{pmatrix} { } { x } \\ { y } \end{pmatrix} + \begin{pmatrix} { } { t_x } \\ { t_y } \end{pmatrix} (x′y′)=(acbd)⋅(xy)+(txty) - 使用齐次坐标 Using homogenous coordinates:
A f f i n e T r a n s f o r m a t i o n s : ( x ′ y ′ 1 ) = ( a b t x c d t y 0 0 1 ) ⋅ ( x y 1 ) \rm{Affine\;Transformations:}\begin{pmatrix} { } { x ^ { \prime } } \\ { y ^ { \prime } } \\ { 1 } \end{pmatrix} = \begin{pmatrix} { } { a } & { b } & { t _ { x } } \\ { c } & { d } & { t _ { y } } \\ { 0 } & { 0 } & { 1 } \end{pmatrix} \cdot \begin{pmatrix} { } { x } \\ { y }\\{1} \end{pmatrix} AffineTransformations:⎝⎛x′y′1⎠⎞=⎝⎛ac0bd0txty1⎠⎞⋅⎝⎛xy1⎠⎞
3.2.6 使用齐次坐标的2D变换 2D Transformations
S c a l e : S ( s x , s y ) = ( s x 0 0 0 s y 0 0 0 1 ) \rm{Scale:}S (s _ { x , } s _ { y } ) = \begin{pmatrix} {} { s _ { x } } & { 0 } & { 0 } \\ { 0 } & { s _ { y } } & { 0 } \\ { 0 } & { 0 } & { 1 } \end{pmatrix} Scale:S(sx,sy)=⎝⎛sx000sy0001⎠⎞
R o t a t i o n : R ( α ) = ( cos α − sin α 0 sin α cos α 0 0 0 1 ) \rm{Rotation:}R ( \alpha ) = \begin{pmatrix} {} { \cos \alpha } & { - \sin \alpha } & { 0 } \\ { \sin \alpha } & { \cos \alpha } & { 0 } \\ { 0 } & { 0 } & { 1 } \end{pmatrix} Rotation:R(α)=⎝⎛cosαsinα0−sinαcosα0001⎠⎞
T r a n s l a t i o n : T ( t x , t y ) = ( 1 0 t x 0 1 t y 0 0 1 ) \rm{Translation:}T ( t _ { x , } t _ { y } ) = \begin{pmatrix} { } { 1 } & { 0 } & { t x } \\ { 0 } & { 1 } & { t _ { y } } \\ { 0 } & { 0 } & { 1 } \end{pmatrix} Translation:T(tx,ty)=⎝⎛100010txty1⎠⎞
齐次坐标的代价是引入了额外的数字参与计算
4 逆变换 Inverse Transform
- M − 1 M^{-1} M−1既是M矩阵的逆,也是矩阵几何意义上的逆

5 组合变换 Composite Transform
5.1 变换的顺序会影响结果! Transform Ordering Matters!
-
先平移后旋转与先旋转后平移

-
从矩阵的运算来看,矩阵的乘法不满足交换律 Matrix multiplication is not commutative
R 45 ⋅ T ( 1 , 0 ) ≠ T ( 1 , 0 ) ⋅ R 45 R _ { 45 } \cdot T _ { ( 1 , 0 ) } \neq T _ { ( 1 , 0 ) } \cdot R _ { 45 } R45⋅T(1,0)=T(1,0)⋅R45 -
注意矩阵的运算顺序是从右到左的 Note that matrices are applied right to left
T ( 1 , 0 ) ⋅ R 45 ( x y 1 ) = ( 1 0 1 0 1 0 0 0 1 ) ( cos 4 5 ∘ − sin 4 5 ∘ 0 sin 4 5 ∘ cos 4 5 ∘ 0 0 0 1 ) ( x y 1 ) T ( 1 , 0 ) \cdot R _ { 45 } \begin{pmatrix} { } { x } \\ { y } \\ { 1 } \end{pmatrix} = \begin{pmatrix} {} { 1 } & { 0 } & { 1 } \\ { 0 } & { 1 }&{0} \\ { 0 } & { 0 } & { 1 } \end{pmatrix}\begin{pmatrix} { } { \cos 45 ^ { \circ } } & { - \sin 45 ^ { \circ } } & { 0 } \\ { \sin 45 ^ { \circ } } & { \cos 45 ^ { \circ } } & { 0 } \\ { 0 } & { 0 } & { 1 } \end{pmatrix} \begin{pmatrix} { } { x } \\ { y } \\ { 1 } \end{pmatrix} T(1,0)⋅R45⎝⎛xy1⎠⎞=⎝⎛100010101⎠⎞⎝⎛cos45∘sin45∘0−sin45∘cos45∘0001⎠⎞⎝⎛xy1⎠⎞
5.2 组合变换 Composite Transform
- 对于仿射变换序列A1, A2, A3, …可以先使用结合律得到一个表示组合变换的单个矩阵,这一点对性能消耗十分重要!
A n ( ⋯ A 2 ( A 1 ( X ) ) ) = A n ⋯ A 2 ⋅ A 1 ⏟ P r e − m u l t i p l y ⋅ ( x y 1 ) A _ { n } ( \cdots A _ { 2 } ( A _ { 1 } ( X ) ) ) =\underbrace{ A _ { n } \cdots A _ { 2 } \cdot A _ { 1 } }_{\rm{Pre-multiply}}\cdot \begin{pmatrix} {} { x } \\ { y } \\ { 1 } \end{pmatrix} An(⋯A2(A1(X)))=Pre−multiply An⋯A2⋅A1⋅⎝⎛xy1⎠⎞
6 分解复杂的变换 Decomposing Complex Transforms
- 如何以任意一点c为圆心旋转 How to rotate around a given point c?
- 先把旋转中心点平移到原点 Translate center to origin
- 旋转 Rotate
- 平移到原位置 Translate back

7 三维变换 3D Transformations
7.1 使用齐次坐标描述三维空间中的点和向量
- 再一次使用齐次坐标 Use homogeneous coordinates again:
3 D p o i n t = ( x , y , z , 1 ) T , 3 D v e c t o r = ( x , y , z , 0 ) T \rm{3D\,point}=(x,y,z,1)^T,\quad\rm{3D\,vector}=(x,y,z,0)^T 3Dpoint=(x,y,z,1)T,3Dvector=(x,y,z,0)T - 使用齐次坐标时,(x, y, z, w)表示三维空间内一点(x/w, y/w, z/w), w≠0
- 使用4×4矩阵来表示仿射变换 Use 4×4 matrices for affine transformation
( x ′ y ′ z ′ 1 ) = ( a b c t x d e f t y g h i t z 0 0 0 1 ) ⋅ ( x y z 1 ) \begin{pmatrix} {} { x ^ { \prime } } \\ { y ^ { \prime } } \\ { z ^ { \prime } } \\ { 1 } \end{pmatrix} =\begin{pmatrix} { } { a } & { b } & { c } & { t _ { x } } \\ { d } & { e } & { f } & { t _ { y } } \\ { g } & { h } & { i } & { t _ { z } } \\ { 0 } & { 0 } & { 0 } & { 1 } \end{pmatrix}\cdot\begin{pmatrix} { } { x } \\ { y } \\ { z } \\ { 1 } \end{pmatrix} ⎝⎜⎜⎛x′y′z′1⎠⎟⎟⎞=⎝⎜⎜⎛adg0beh0cfi0txtytz1⎠⎟⎟⎞⋅⎝⎜⎜⎛xyz1⎠⎟⎟⎞ - 仿射变换的顺序是先进行线性变换,再平移
7.2 三维空间中的缩放与平移 Scale and Translation
- 缩放 Scale
S ( s x , s y , s z ) = ( s x 0 0 0 0 s y 0 0 0 0 s z 0 0 0 0 1 ) S ( s _ { x },s _ { y },s _ { z } ) = \begin{pmatrix} {} { s _ { x } } & { 0 } & { 0 } & { 0 } \\ { 0 } & { s _ { y } } & { 0 } & { 0 } \\ { 0 } & { 0 } & { s_z } & { 0 } \\ { 0 } & { 0 } & { 0 } & { 1 }\end{pmatrix} S(sx,sy,sz)=⎝⎜⎜⎛sx0000sy0000sz00001⎠⎟⎟⎞ - 平移 Translation
T ( t x , t y , t z ) = ( 1 0 0 t x 0 1 0 t y 0 0 1 t z 0 0 0 1 ) T ( t _ { x }, t _ { y }, t _ { z }) = \begin{pmatrix} { } { 1 } & { 0 } & { 0 } & { t _ { x } } \\ { 0 } & { 1 } & { 0 } & { t _ { y } } \\ { 0 } & { 0 } & { 1 } & { t _ { z } } \\ { 0 } & { 0 } & { 0 } & { 1}\end{pmatrix} T(tx,ty,tz)=⎝⎜⎜⎛100001000010txtytz1⎠⎟⎟⎞
7.3 三维空间中的旋转 3D Rotations
7.3.1 沿x,y,z轴旋转 Rotation around x-, y-, or z-axis

R x ( α ) = ( 1 0 0 0 0 cos α − sin α 0 0 sin α cos α 0 0 0 0 1 ) R _ { x } ( \alpha ) = \begin{pmatrix} { } { 1 } & { 0 } & { 0 } & { 0 } \\ { 0 } & { \cos \alpha } & { - \sin \alpha } & { 0 } \\ { 0 } & { \sin \alpha } & { \cos \alpha } & { 0 } \\ { 0 } & { 0 } & { 0 } & { 1 } \end{pmatrix} Rx(α)=⎝⎜⎜⎛10000cosαsinα00−sinαcosα00001⎠⎟⎟⎞
R y ( α ) = ( cos α 0 sin α 0 0 1 0 0 − sin α 0 cos α 0 0 0 0 1 ) R _ { y } ( \alpha ) = \begin{pmatrix} {} { \cos \alpha } & { 0 } & { \sin \alpha } & { 0 } \\ { 0 } & { 1 } & { 0 } & { 0 } \\ { - \sin \alpha } & { 0 } & { \cos \alpha } & { 0 } \\ { 0 } & { 0 } & { 0 } & { 1 } \end{pmatrix} Ry(α)=⎝⎜⎜⎛cosα0−sinα00100sinα0cosα00001⎠⎟⎟⎞
R z ( α ) = ( cos α − sin α 0 0 sin α cos α 0 0 0 0 1 0 0 0 1 0 ) R _ { z } ( \alpha ) = \begin{pmatrix} { } { \cos \alpha } & { - \sin \alpha } & { 0 } & { 0 } \\ { \sin \alpha } & { \cos \alpha } & { 0 } & { 0 } \\ { 0 } & { 0 } & { 1 } & { 0 } \\ { 0 } & { 0 } & { 1 } & { 0 } \end{pmatrix} Rz(α)=⎝⎜⎜⎛cosαsinα00−sinαcosα0000110000⎠⎟⎟⎞
注意:沿y轴旋转时矩阵稍有不同(z叉乘x得到y轴,而不是x叉乘z)
弹幕解释:xyz,yzx,zxy,这三个没有本质区别,懂了这个,前面迎刃而解
7.3.2 任意一个旋转能看作几个绕轴旋转的组合 Compose any 3D rotation from Rx, Ry, Rz
-
三个一组的描述物体旋转的参量叫欧拉角 Euler angles
-
在飞行模拟器中一般有滚转、俯仰、偏航 Often used in flight simulators: roll, pitch, yaw

-
罗德里格旋转公式 Rodrigues’ Rotation Formula
绕 n 轴 旋 转 α 角 度 : ( n , α ) = cos ( α ) I + ( 1 − cos ( α ) ) n n T + sin ( α ) ( 0 − n z n y n z 0 − n x − n y n x 0 ) ⏟ N \rm{绕n轴旋转\alpha角度:} ( n , \alpha ) = \cos ( \alpha ) I + ( 1 - \cos ( \alpha ) ) n n ^ { T } +\sin ( \alpha ) \underbrace{\begin{pmatrix} { } { 0 } & { - n _ { z } } & { n _ { y } } \\ { n _ { z } } & { 0 } & { - n _ { x } } \\ { - n _ { y } } & { n _ { x } } & { 0 } \end{pmatrix}}_{\rm{N}} 绕n轴旋转α角度:(n,α)=cos(α)I+(1−cos(α))nnT+sin(α)N ⎝⎛0nz−ny−nz0nxny−nx0⎠⎞ -
如果要沿任意轴旋转,和二维类似,需要先把旋转的起点移到轴上,然后旋转,最后再移回原位
-
四元数(Quaternion)的引入主要是为了解决旋转角度间的插值问题,本课暂不涉及
8 观测变换 Viewing transformation
8.1 视图变换 View/Camera transformation
8.1.1 什么是视图变换 What is view transformation?
- 想象一下如何拍一张照片 Think about how to take a photo
- 找个地方安排人(模型变换)Find a good place and arrange people (model transformation)
- 找个“角度”放相机(视图变换)Find a good “angle” to put the camera (view transformation)
- 茄子!(投影变换)Cheese! (projection transformation)
8.1.2 如何确定视图变换 How to perform view transformation?
- 定义一个相机
- 确定位置 Position e ⃗ \vec{e} e
- 确定看向的方向 Look-at / gaze direction g ^ \hat{g} g^
- 确定向上方向(来确定相机左右倾斜方向)Up direction t ^ \hat{t} t^

8.1.3 标准位置 Key observation
-
相机和物体的相对位置不变,则画面也不变 If the camera and all objects move together, the “photo” will be the same

-
我们通常将相机的位置移动到原点、向上方向为Y轴方向、看向-Z轴方向,物体与相机同时变换we always transform the camera to the origin, up at Y, look at -Z, and transform the objects along with the camera

-
通过矩阵 M v i e w M_{view} Mview来对相机进行变换 Transform the camera by M v i e w M_{view} Mview
M v i e w = R v i e w T v i e w M_{view}=R_{view}T_{view} Mview=RviewTview- 平移到原点 Translate e to origin
T v i e w = ( 1 0 0 − x c 0 1 0 − y c 0 0 1 − z c 0 0 0 1 ) T _ {view } = \begin{pmatrix} { } { 1 } & { 0 } & { 0 } & { - x _ { c } } \\ { 0 } & { 1 } & { 0 } & { - y _ { c } } \\ { 0 } & { 0 } & { 1 } & { - z_c } \\ { 0 } & { 0 } & { 0 } & { 1 } \end{pmatrix} Tview=⎝⎜⎜⎛100001000010−xc−yc−zc1⎠⎟⎟⎞ - 将g旋转到-Z,t旋转到Y,(g×t)旋转到X Rotate g to -Z, t to Y, (g x t) To X
R v i e w − 1 = ( x g ^ × t ^ x t x − g 0 y g ^ × t ^ y t y − g 0 z g ^ × t ^ z t z − g 0 0 0 0 1 ) ⟹ R v i e w = ( x g ^ × t ^ y g ^ × t ^ z g ^ × t ^ 0 x t y t z t 0 x − g y − g z − g 0 0 0 0 1 ) R^{-1}_{view}=\begin{pmatrix} {} { x _ { \hat{g} \times \hat{t}} } & { x _ { t } } & { x _ { -g } } & { 0 } \\ { y _ { \hat{g} \times \hat{t}} } & { y _ { t } } & { y _ { - g } } & { 0 } \\ { z _ {\hat{g} \times \hat{t}}} & { z _ { t } } & { z _ { - g } } & { 0 } \\ { 0 } & { 0}&{0}&{1}\end{pmatrix}\implies R_{view}=\begin{pmatrix} {} { x _ { \hat{g} \times \hat{t}} } & { y _ { \hat{g} \times \hat{t}} } & { z _ { \hat{g} \times \hat{t}} } & { 0 } \\ { x _ { t } } & { y _ { t } } & { z _ { t } } & { 0 } \\ { x _ { - g } } & { y _ { - g } } & { z _ { - g } } & { 0 } \\ { 0 } & { 0 }&{ 0 }&{ 1 }\end{pmatrix} Rview−1=⎝⎜⎜⎛xg^×t^yg^×t^zg^×t^0xtytzt0x−gy−gz−g00001⎠⎟⎟⎞⟹Rview=⎝⎜⎜⎛xg^×t^xtx−g0yg^×t^yty−g0zg^×t^ztz−g00001⎠⎟⎟⎞
- 平移到原点 Translate e to origin
旋转矩阵是正交矩阵(Orthogonal Matrix),这里因其逆矩阵比较好写出来,所以利用了正交矩阵的逆等于其转置的性质求出了旋转矩阵
8.2 投影变换 Projection transformation
8.2.1正交投影与透视投影 Perspective projection vs. orthographic projection
- 人眼更接近透视投影,正交投影常用于工业制图
- “近大远小““一叶障目”“道理我都懂但是鸽子为什么这么大”都指的是透视投影


8.2.2 正交投影 Othographic projection
简单的理解 A simple way of understanding
- 相机在原点,朝向-Z方向,上指Y方向 Camera located at origin, looking at -Z, up at Y
- 去掉Z轴坐标 Drop Z coordinate
- 将得到的矩形平移并缩放到 [ − 1 , 1 ] 2 [-1, 1]^2 [−1,1]2 Translate and scale the resulting rectangle to [ − 1 , 1 ] 2 [-1, 1]^2 [−1,1]2
正式的理解 In general
-
我们希望将一个立方体空间 [ l , r ] × [ b , t ] × [ f , n ] [l, r] × [b, t] × [f, n] [l,r]×[b,t]×[f,n]映射成一个标准的正方体 [ − 1 , 1 ] 3 [-1, 1]^3 [−1,1]3 We want to map a cuboid [ l , r ] × [ b , t ] × [ f , n ] [l, r] × [b, t] × [f, n] [l,r]×[b,t]×[f,n] to the “canonical cube [ − 1 , 1 ] 3 [-1, 1]^3 [−1,1]3
-
在变换时先平移(中心移到原点),再缩放(长宽高变为2) Translate (center to origin) first, then scale (length/width/height to 2)
M o r t h o = ( 2 r − l 0 0 0 0 2 t − b 0 0 0 0 2 n − f 0 0 0 0 1 ) ( 1 0 0 − r + l 2 0 1 0 − t + b 2 0 0 1 − n + f 2 0 0 0 1 ) M_{ortho}=\begin{pmatrix} { } { \frac { 2 } { r - l } } & { 0 } & { 0 } & { 0 } \\ { 0 } & { \frac { 2 } { t - b } } & { 0 } & { 0 } \\ { 0 } & { 0 } & { \frac { 2 } { n - f } } & { 0 } \\ { 0 } & { 0 } & { 0 } & { 1 } \end{pmatrix}\begin{pmatrix} {} { 1 } & { 0 } & { 0 } & { - \frac { r + l } { 2 } } \\ { 0 } & { 1 } & { 0 } & { - \frac { t + b } { 2 } } \\ { 0 } & { 0 } & { 1 } & { - \frac { n + f } { 2 } } \\ { 0 } & { 0 } & { 0 } & { 1 } \end{pmatrix} Mortho=⎝⎜⎜⎛r−l20000t−b20000n−f200001⎠⎟⎟⎞⎝⎜⎜⎛100001000010−2r+l−2t+b−2n+f1⎠⎟⎟⎞

-
注意事项
- 相机看向-Z方向时近的坐标会大于远的坐标 Looking at / along -Z is making near and far not intuitive (n > f)
- 这也是为什么OpenGL在这一步使用左手坐标系 that’s why OpenGL (a Graphics API) uses left hand coords
8.2.3 透视投影 Perspective projection
怎样做透视投影?
- 首先将截头体“挤压”成一个长方体 First “squish” the frustum into a cuboid (n -> n, f -> f)( M p e r s p → o r t h o M_{persp\to ortho} Mpersp→ortho)
- 做正交投影 Do orthographic projection ( M o r t h o M_{ortho} Mortho, already known!)

“挤压”变换的矩阵推导过程
- 由相似三角形可得到坐标变换前后的关系 Find the relationship between transformed points (x’, y’, z’) and the original points (x, y, z)

y ′ = n z y , x ′ = n z x y\prime=\frac{n}{z}y\rm{,}x\prime=\frac{n}{z}x y′=zny,x′=znx
2. 此时利用齐次坐标可以写出含有一个未知数的变换后的坐标 In homogeneous coordinates
( x y z 1 ) ⇒ ( n x / z n y / z u n k n o w n 1 ) = = ( n y n y s t i l l u n k n o w n z ) \begin{pmatrix} { } { x } \\ { y } \\ { z } \\ { 1 } \end{pmatrix} \Rightarrow \begin{pmatrix} { } { n x / z } \\ { n y / z } \\ { un k n o wn} \\ { 1 } \end{pmatrix} = = \begin{pmatrix} { } { n y } \\ { n y} \\ { still\;unk n o w n }\\{z} \end{pmatrix} ⎝⎜⎜⎛xyz1⎠⎟⎟⎞⇒⎝⎜⎜⎛nx/zny/zunknown1⎠⎟⎟⎞==⎝⎜⎜⎛nynystillunknownz⎠⎟⎟⎞
3. 所以“挤压”变换的矩阵有如下关系 So the “squish” (persp to ortho) projection does this
M p e r s p → o r t h o ( 4 × 4 ) ( x y z 1 ) = ( n x n y u n k n o w n z ) M^{(4×4)}_{persp\to ortho}\begin{pmatrix} { } { x } \\ { y } \\ { z } \\ { 1 } \end{pmatrix} = \begin{pmatrix} { } { n x } \\ { n y } \\ {unknown} \\{ z } \end{pmatrix} Mpersp→ortho(4×4)⎝⎜⎜⎛xyz1⎠⎟⎟⎞=⎝⎜⎜⎛nxnyunknownz⎠⎟⎟⎞
4. 以上信息我们已经可以填出一部分 M p e r s p → o r t h o M_{persp\to ortho} Mpersp→ortho Already good enough to figure out part of M p e r s p → o r t h o M_{persp\to ortho} Mpersp→ortho(接下来只用找出该矩阵第三行上的数到底是多少即可)
M p e r s p → o r t h o = ( n 0 0 0 0 n 0 0 ? ? ? ? 0 0 1 0 ) M_{persp\to ortho}=\begin{pmatrix} { } { n } & { 0 } & { 0 } & { 0 } \\ { 0 } & { n } & { 0 } & { 0 } \\ { ? } & { ? } & { ? } & { ? } \\ { 0 } & { 0 } & { 1 } & { 0 } \end{pmatrix} Mpersp→ortho=⎝⎜⎜⎛n0?00n?000?100?0⎠⎟⎟⎞
5. 任何在近的平面上的点坐标都不变 Any point on the near plane will not change
M p e r s p → o r t h o ( 4 × 4 ) ( x y z 1 ) = ( n x n y u n k n o w n z ) r e p l a c e z w i t h n → M p e r s p → o r t h o ( 4 × 4 ) ( x y n 1 ) = ( x y n 1 ) = ( n x n y n 2 n ) = ( n x n y u n k n o w n z ) M^{(4×4)}_{persp\to ortho}\begin{pmatrix} {} { x } \\ { y } \\ { z } \\ { 1 } \end{pmatrix} = \begin{pmatrix} {} { n x } \\ { n y } \\ {unknown} \\{ z } \end{pmatrix}\quad\underrightarrow{\rm{replace\;z\;with\;n}}\quad M^{(4×4)}_{persp\to ortho}\begin{pmatrix} {} { x } \\ { y } \\ { n } \\ { 1 } \end{pmatrix} =\begin{pmatrix} {} { x } \\ { y } \\ { n } \\ { 1 } \end{pmatrix}= \begin{pmatrix} {} { n x } \\ { n y } \\ {n^2} \\{ n } \end{pmatrix}=\begin{pmatrix} {} { n x } \\ { n y } \\ {unknown} \\{ z } \end{pmatrix} Mpersp→ortho(4×4)⎝⎜⎜⎛xyz1⎠⎟⎟⎞=⎝⎜⎜⎛nxnyunknownz⎠⎟⎟⎞replacezwithnMpersp→ortho(4×4)⎝⎜⎜⎛xyn1⎠⎟⎟⎞=⎝⎜⎜⎛xyn1⎠⎟⎟⎞=⎝⎜⎜⎛nxnyn2n⎠⎟⎟⎞=⎝⎜⎜⎛nxnyunknownz⎠⎟⎟⎞
n 2 n^2 n2与x,y没有关系,所以 M p e r s p → o r t h o M_{persp\to ortho} Mpersp→ortho的第三行一定是(0 0 A B),A,B为未知量 So the third row must be of the form (0 0 A B)
( n 0 0 0 0 n 0 0 0 0 A B 0 0 1 0 ) ( x y n 1 ) = ( n x n y n 2 n ) ⟹ ( 0 0 A B ) ( x y n 1 ) = n 2 ⟹ A n + B = n 2 \begin{pmatrix} { } { n } & { 0 } & { 0 } & { 0 } \\ { 0 } & { n } & { 0 } & { 0 } \\ { 0 } & { 0 } & { A } & { B } \\ { 0 } & { 0 } & { 1 } & { 0 } \end{pmatrix} \begin{pmatrix} { } { x } \\ { y } \\{n}\\ { 1 } \end{pmatrix} = \begin{pmatrix} {} { n x } \\ { n y } \\ {n^2} \\{ n } \end{pmatrix}\implies\begin{pmatrix} { } { 0 } & { 0 } & { A } & { B } \end{pmatrix} \begin{pmatrix} { } { x } \\ { y } \\{n}\\ { 1 } \end{pmatrix} = n ^ { 2 }\implies An+B=n^2 ⎝⎜⎜⎛n0000n0000A100B0⎠⎟⎟⎞⎝⎜⎜⎛xyn1⎠⎟⎟⎞=⎝⎜⎜⎛nxnyn2n⎠⎟⎟⎞⟹(00AB)⎝⎜⎜⎛xyn1⎠⎟⎟⎞=n2⟹An+B=n2
6. 任何在远处平面上的点Z轴坐标都不变,且远处平面中心点变换前后都为(0, 0, f, 1) Any point’s z on the far plane will not change M p e r s p → o r t h o ( 4 × 4 ) ( x y z 1 ) = ( n x n y u n k n o w n z ) ( x , y , z , 1 ) t o ( 0 , 0 , f , 1 ) → M p e r s p → o r t h o ( 4 × 4 ) ( 0 0 f 1 ) = ( 0 0 f 1 ) = ( 0 0 f 2 f ) = ( n x n y u n k n o w n z ) M^{(4×4)}_{persp\to ortho}\begin{pmatrix} {} { x } \\ { y } \\ { z } \\ { 1 } \end{pmatrix} = \begin{pmatrix} {} { n x } \\ { n y } \\ {unknown} \\{ z } \end{pmatrix}\quad\underrightarrow{\rm{(x,y,z,1)to(0,0,f,1)}}\quad M^{(4×4)}_{persp\to ortho}\begin{pmatrix} {} { 0 } \\ { 0 } \\ { f } \\ { 1 } \end{pmatrix} =\begin{pmatrix} {} { 0 } \\ { 0 } \\ { f } \\ { 1 } \end{pmatrix}= \begin{pmatrix} {} {0} \\ {0 } \\ {f^2} \\{ f } \end{pmatrix}=\begin{pmatrix} {} { n x } \\ { n y } \\ {unknown} \\{ z } \end{pmatrix} Mpersp→ortho(4×4)⎝⎜⎜⎛xyz1⎠⎟⎟⎞=⎝⎜⎜⎛nxnyunknownz⎠⎟⎟⎞(x,y,z,1)to(0,0,f,1)Mpersp→ortho(4×4)⎝⎜⎜⎛00f1⎠⎟⎟⎞=⎝⎜⎜⎛00f1⎠⎟⎟⎞=⎝⎜⎜⎛00f2f⎠⎟⎟⎞=⎝⎜⎜⎛nxnyunknownz⎠⎟⎟⎞
第三行为(0 0 A B)时可得到关系式
( n 0 0 0 0 n 0 0 0 0 A B 0 0 1 0 ) ( 0 0 f 1 ) = ( 0 0 f 2 f ) ⟹ ( l l 0 0 A B ) ( 0 0 f 1 ) = f 2 ⟹ A f + B = f 2 \begin{pmatrix} { } { n } & { 0 } & { 0 } & { 0 } \\ { 0 } & { n } & { 0 } & { 0 } \\ { 0 } & { 0 } & { A } & { B } \\ { 0 } & { 0 } & { 1 } & { 0 } \end{pmatrix} \begin{pmatrix} { } { 0 } \\ { 0 } \\{f}\\ { 1 } \end{pmatrix} = \begin{pmatrix} {} { 0 } \\ { 0 } \\ {f^2} \\{ f } \end{pmatrix}\implies \begin{pmatrix} { l l } { 0 } & { 0 } & { A } & { B } \end{pmatrix} \begin{pmatrix} { } { 0 } \\ { 0 } \\{f}\\ { 1 } \end{pmatrix} = f ^ { 2 } \implies Af+B=f^2 ⎝⎜⎜⎛n0000n0000A100B0⎠⎟⎟⎞⎝⎜⎜⎛00f1⎠⎟⎟⎞=⎝⎜⎜⎛00f2f⎠⎟⎟⎞⟹(ll00AB)⎝⎜⎜⎛00f1⎠⎟⎟⎞=f2⟹Af+B=f2
7. 解出A和B的值 Solve for A and B
{ A n + B = n 2 A f + B = f 2 ⟹ { A = n + f B = − n f \begin{cases}An+B=n^2\\Af+B=f^2\end{cases}\implies \begin{cases}A=n+f\\B=-nf\end{cases} {
An+B=n2Af+B=f2⟹{
A=n+fB=−nf
- 终于,我们已经知道了 M p e r s p → o r t h o M_{persp\to ortho} Mpersp→ortho的每一项 Finally, every entry in Mpersp->ortho is known!
M p e r s p → o r t h o = ( n 0 0 0 0 n 0 0 0 0 n + f − n f 0 0 1 0 ) M_{persp\to ortho}=\begin{pmatrix} { } { n } & { 0 } & { 0 } & { 0 } \\ { 0 } & { n } & { 0 } & { 0 } \\ { 0 } & { 0 } & { n+f } & { -nf} \\ { 0 } & { 0 } & { 1 } & { 0 } \end{pmatrix} Mpersp→ortho=⎝⎜⎜⎛n0000n0000n+f100−nf0⎠⎟⎟⎞
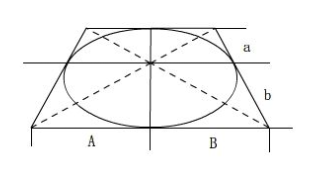
在挤压的过程中,对于远近平面的中间的某一个点,经过变化后会被推向远处
个人猜想:这个和画画时近大远小中间处被推向远处可能有关(即a<b)
- 完整的透视投影变换
M p e r s p = M o r t h o M p e r s p → o r t h o M_{persp}=M_{ortho}M_{persp\to ortho} Mpersp=MorthoMpersp→ortho - 如何定义截头体中较近的面 What’s near plane’s l, r, b, t
-
垂直可视角度 Vertical Field-of-View (fovY)
-
宽高比 Aspect ratio

-
垂直可视角度、宽高比和l, r, b, t的转换关系 How to convert from fovY and aspect to l, r, b, t?

-
tan f o v Y 2 = t ∣ n ∣ , a s p e c t = r t \tan \frac { f o v Y } { 2 } = \frac { t } { | n | },\quad aspect=\frac{r}{t} tan2fovY=∣n∣t,aspect=tr