在HOME目录下创建ABB机器人工作空间
cd
mkdir -p ABB_ws/src
下载ABB机器人ROS驱动包
cd ABB_ws
git clone https://github.com/ros-industrial/industrial_core.git
#-------------------------------------------------------------------------------------------------------#
cd src
git clone https://github.com/ros-industrial/abb.git
git clone https://github.com/ros-industrial/abb_experimental.git
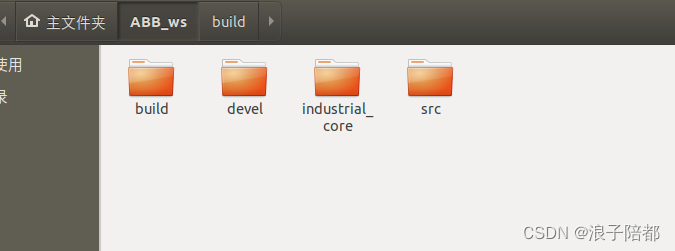
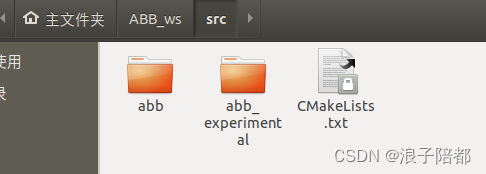
下载完成以后,文件夹的结构
cd ..
rosdep install --from-paths src/ --ignore-src --rosdistro melodic
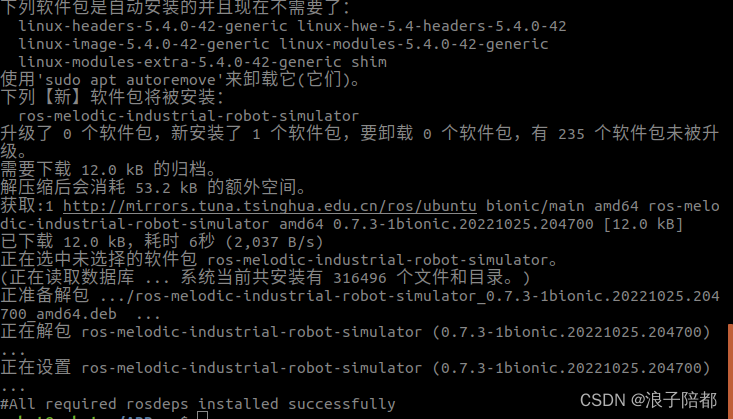
有上图的提示就算完全安装成功了。
编译ROS包
catkin_make
把ABB的包添加到bash的环境变量。
echo "source ~/ABB_ws/devel/setup.bash" >> ~/.bashrc
source ~/.bashrc
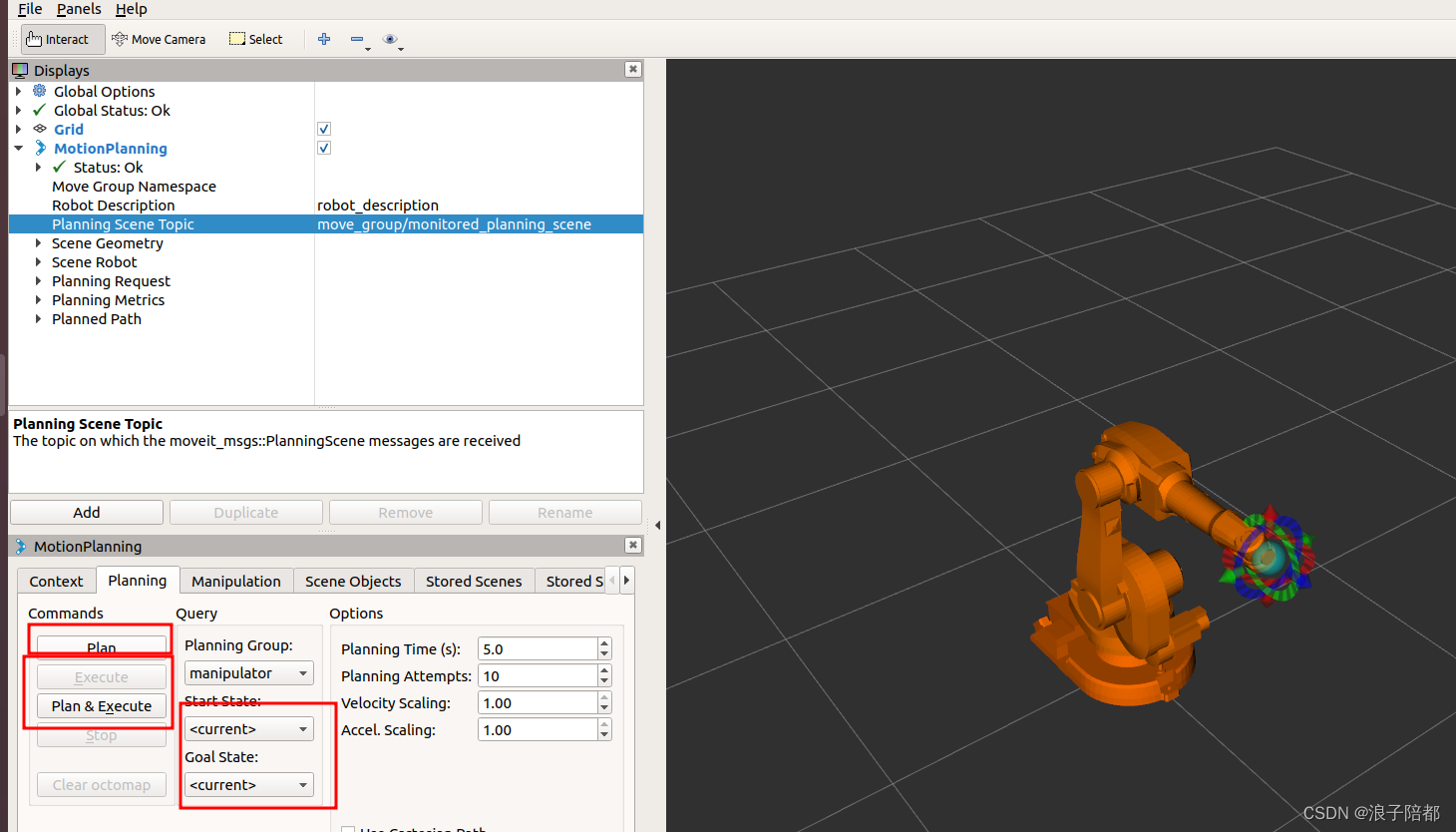
启动ABB 机器人
roslaunch abb_irb1600_6_12_moveit_config moveit_planning_execution.launch sim:=false robot_ip:=192.168.1.101
这里robot_ip 后面是我robostudio那台电脑的IP地址。
整个终端在启动的时候并没有报错,就没啥问题,如果报错就需要根据报错内容自行排查,一般跟Moveit的依赖没有安装完整有关。