一、运行carla_ad_demo
1.添加carla-ros-bridge的全局环境变量
2.用二进制版本打开carla0.9.13
./CarlaUE4.sh
3.运行carla_ad_demo.launch文件
roslaunch carla_ad_demo carla_ad_demo.launch

在~/carla/ros_ws目录下打开终端,查看rviz
rviz -d src/carla-ros-bridge/carlad_demo/config/carla_ad_demo.rviz
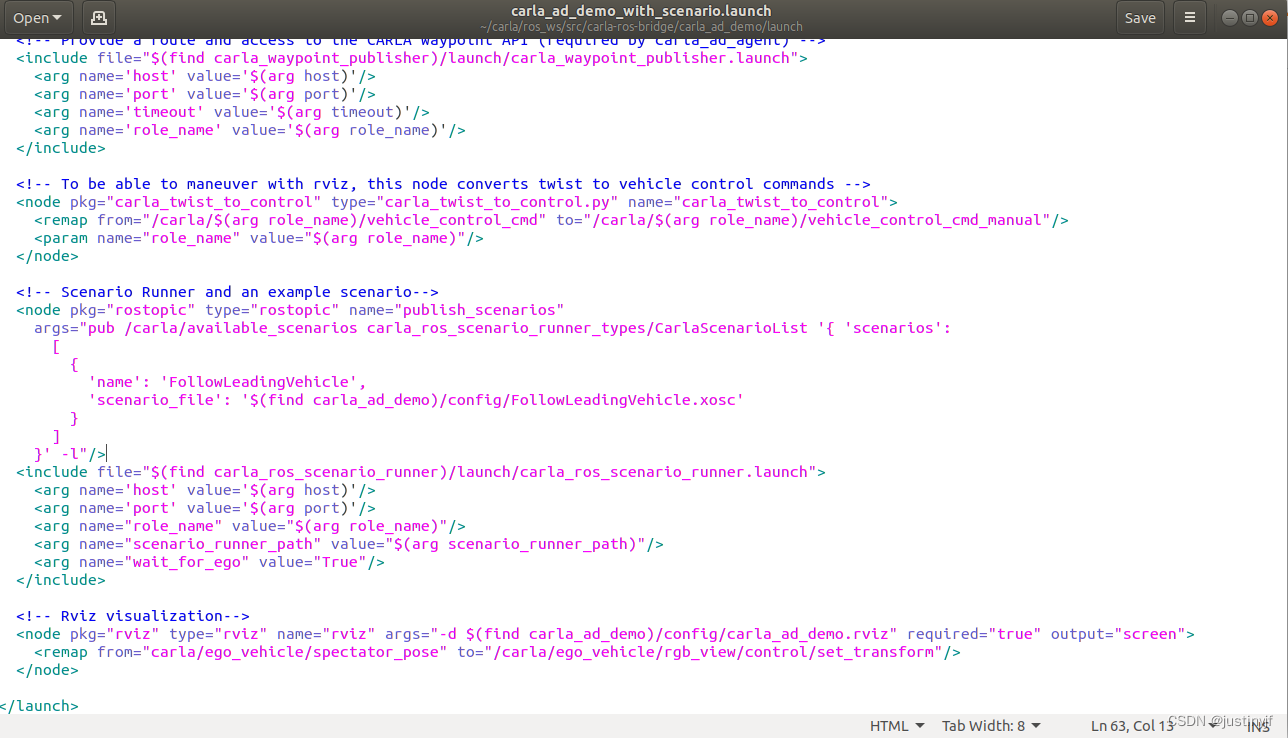
4.运行carla_ad_demo_with_scenario.launch文件
roslaunch carla_ad_demo carla_ad_demo_with_scenario.launch
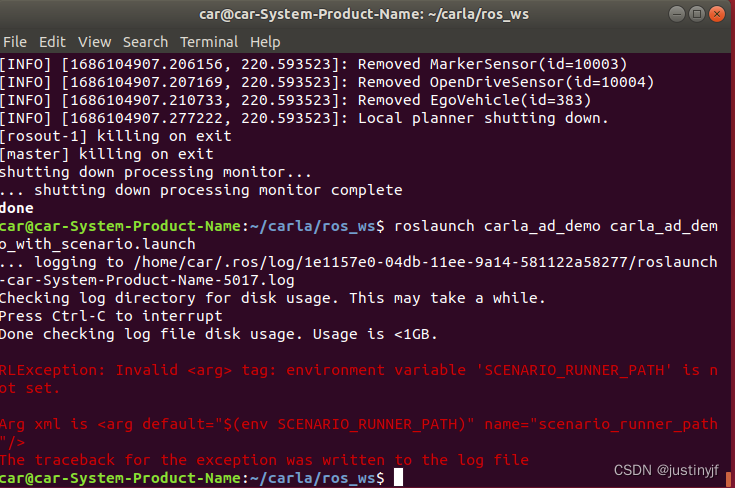
将export SCENARIO_RUNNER_PATH=/home/car/carla/scenario_runner添加到全局
export SCENARIO_RUNNER_PATH=/home/car/carla/scenario_runner
继续运行,出现以下报错:No module named networkx,No module named pexpect,缺少相应模块
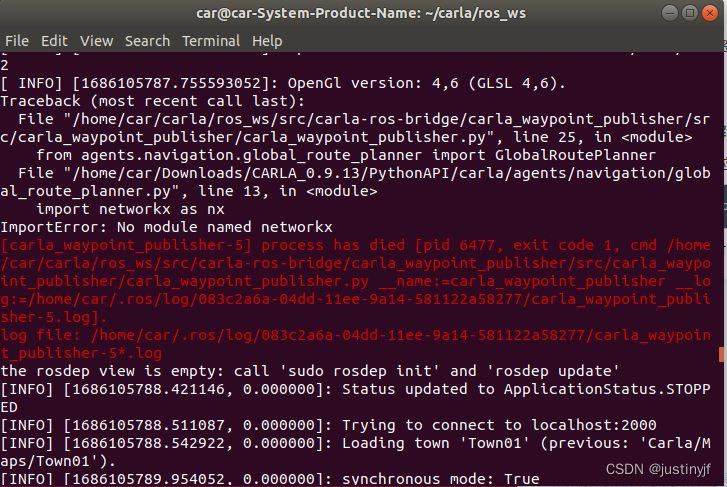
sudo pip install networkx
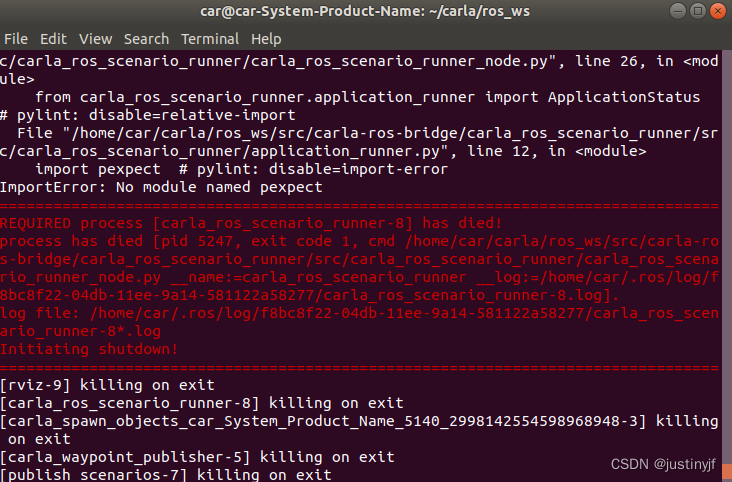
sudo -E pip install pexpect
错误解决!
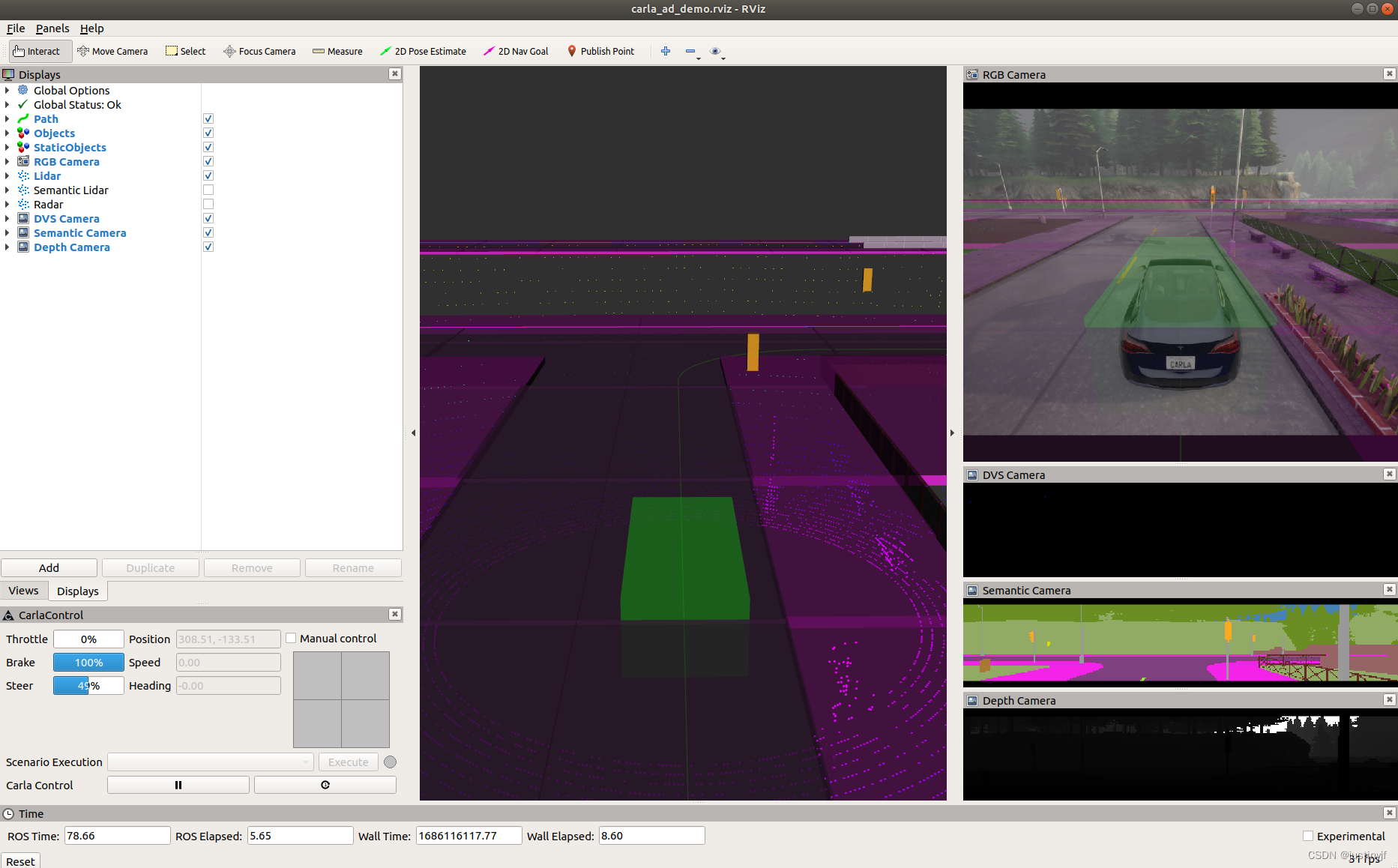
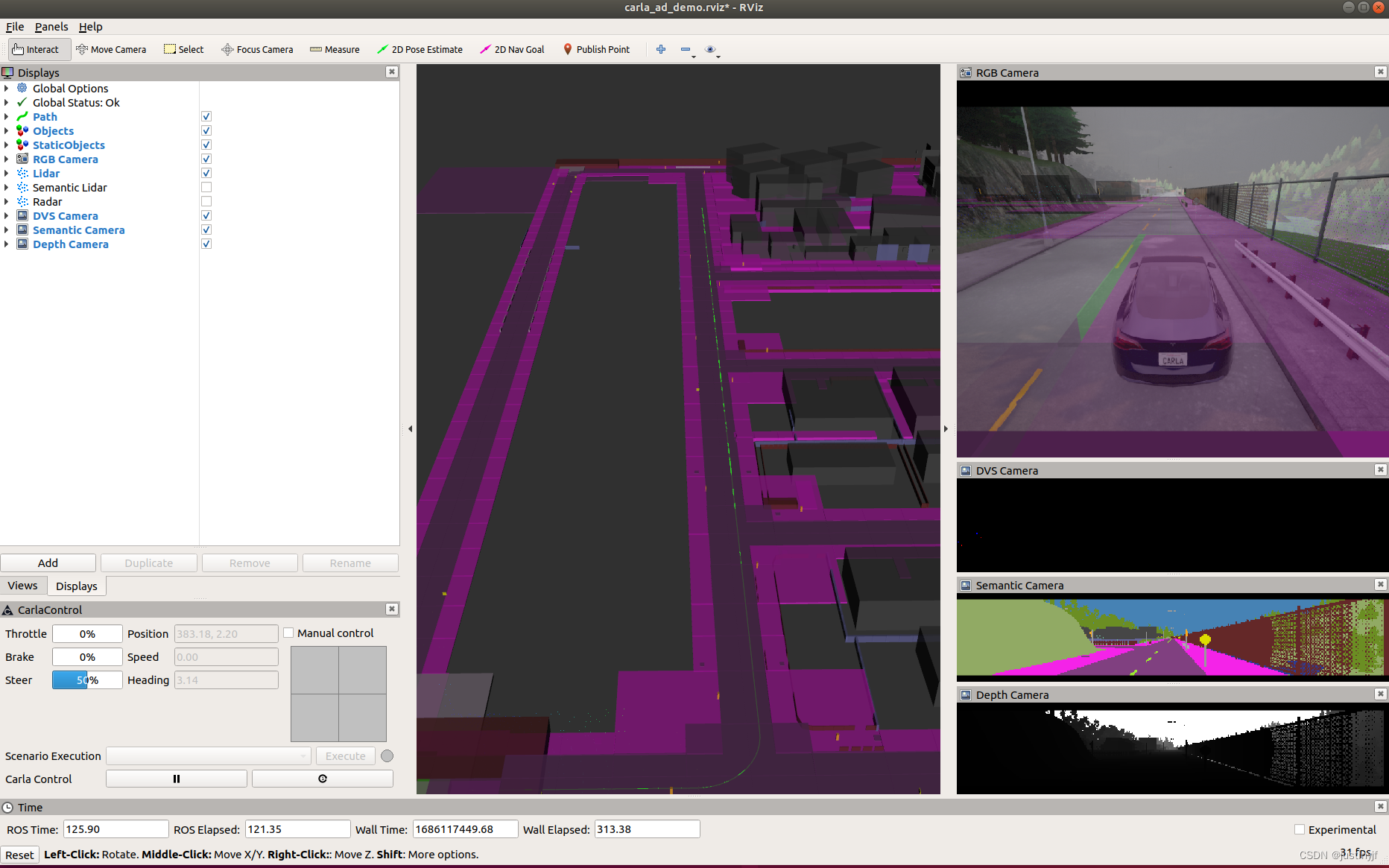
launch文件中有rviz节点
运行
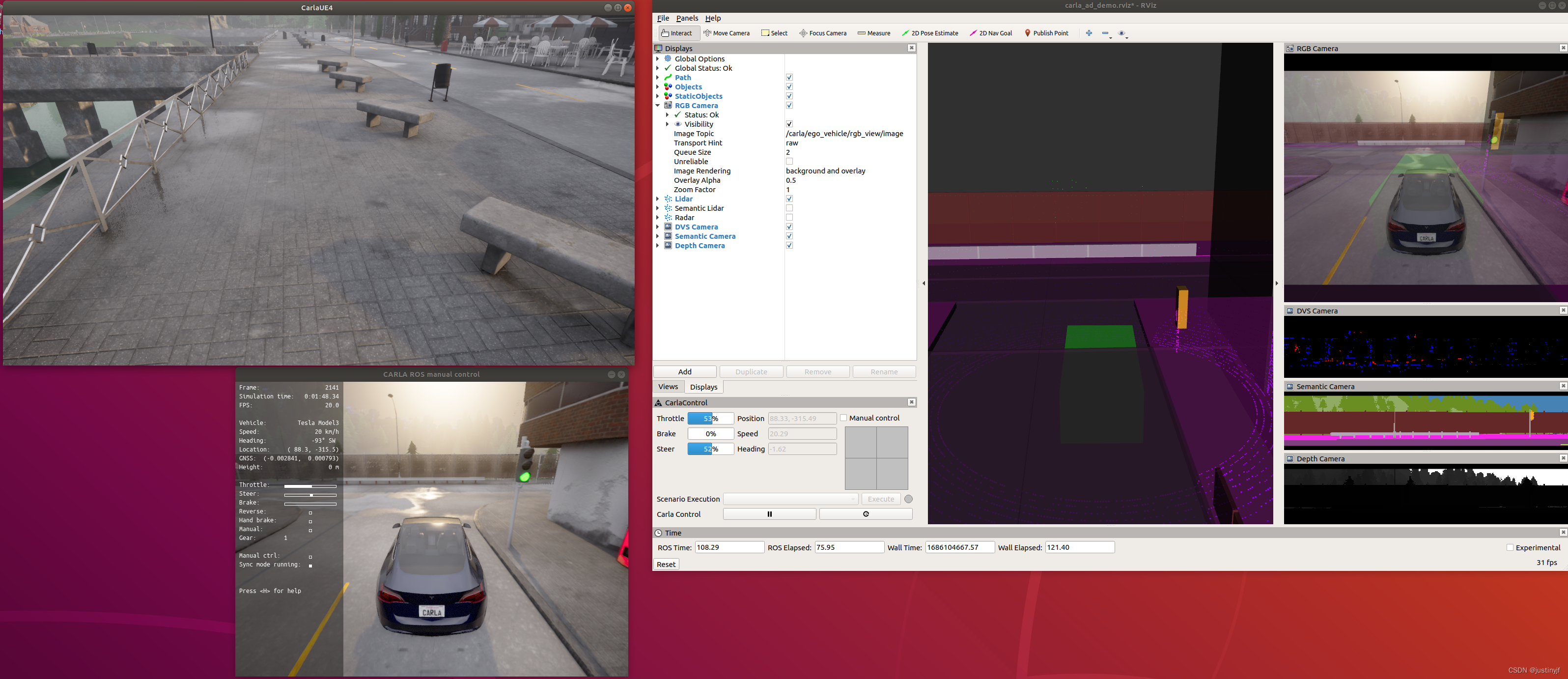
roslaunch carla_ad_demo carla_ad_demo_with_scenario.launch
传感器数据在rviz全部可以看到
打开终端查看话题
rostopic list
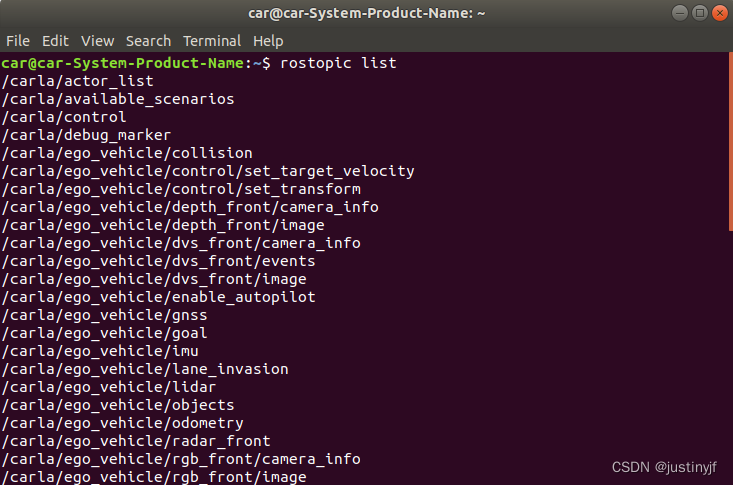
输出话题数据(比如lidar)
rostopic echo /carla/ego_vehicle/lidar
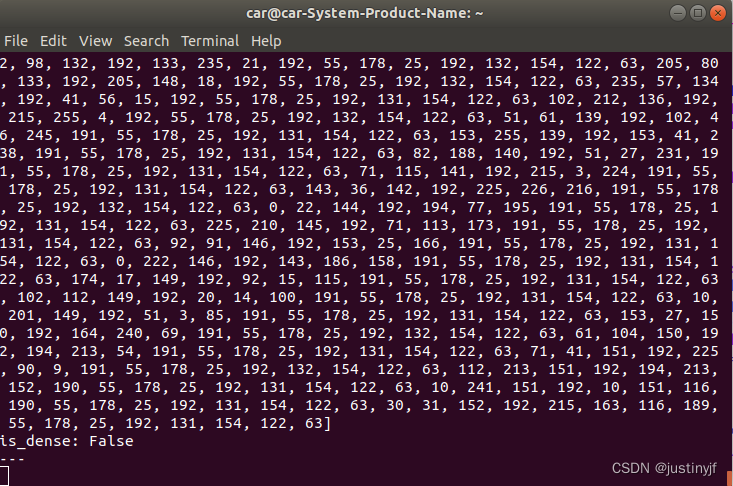
数据查看成功!
二、分解动作
1.在ros_ws路径下先打开carla_ros_bridge_with_example_ego_vehicle.launch文件,并打开rviz窗口,再运行carla_waypoint_publisher.launch,需要在三个窗口分别运行
roslaunch carla_ros_bridge carla_ros_bridge_with_example_ego_vehicle.launch
rviz -d src/carla-ros-bridge/carla_ad_demo/config/carla_ad_demo.rviz
roslaunch carla_waypoint_publisher carla_waypoint_publisher.launch
可以看到生成了一条路径(绿色线条)
2.执行控制器
在以上基础之上,在ros_ws打开一个新的终端
roslaunch carla_ad_agent carla_ad_agent.launch
发布速度信息,5m/s
rostopic pub /carla/ego_vehicle/target_speed std_msgs/Float64 5.0
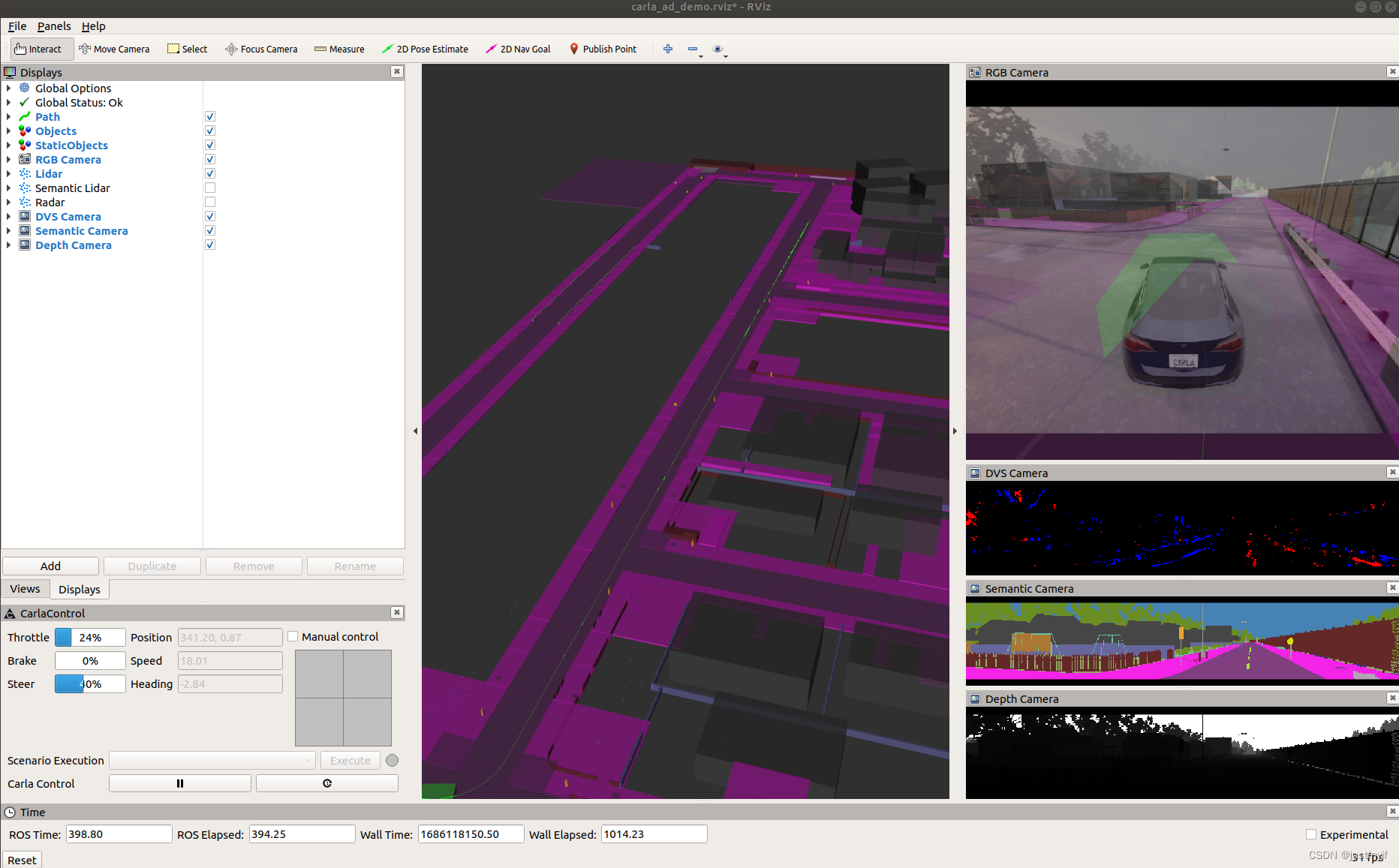
可以看到小车向前运动!