错误
rviz雷达扫描的地图和map组件加载的图位置有偏移怎么办
1、加载map_server地图并打开gazebo仿真环境
在rviz中发现雷达扫描的gazebo地图与map_server读取地图位置存在偏移
分析
map_server 保存地图后两文件一个是.pgm后缀的图片,另一个是.yaml后缀的地图描述文件
.yaml文件属性:

出现偏移正是因为origin参数不合适:

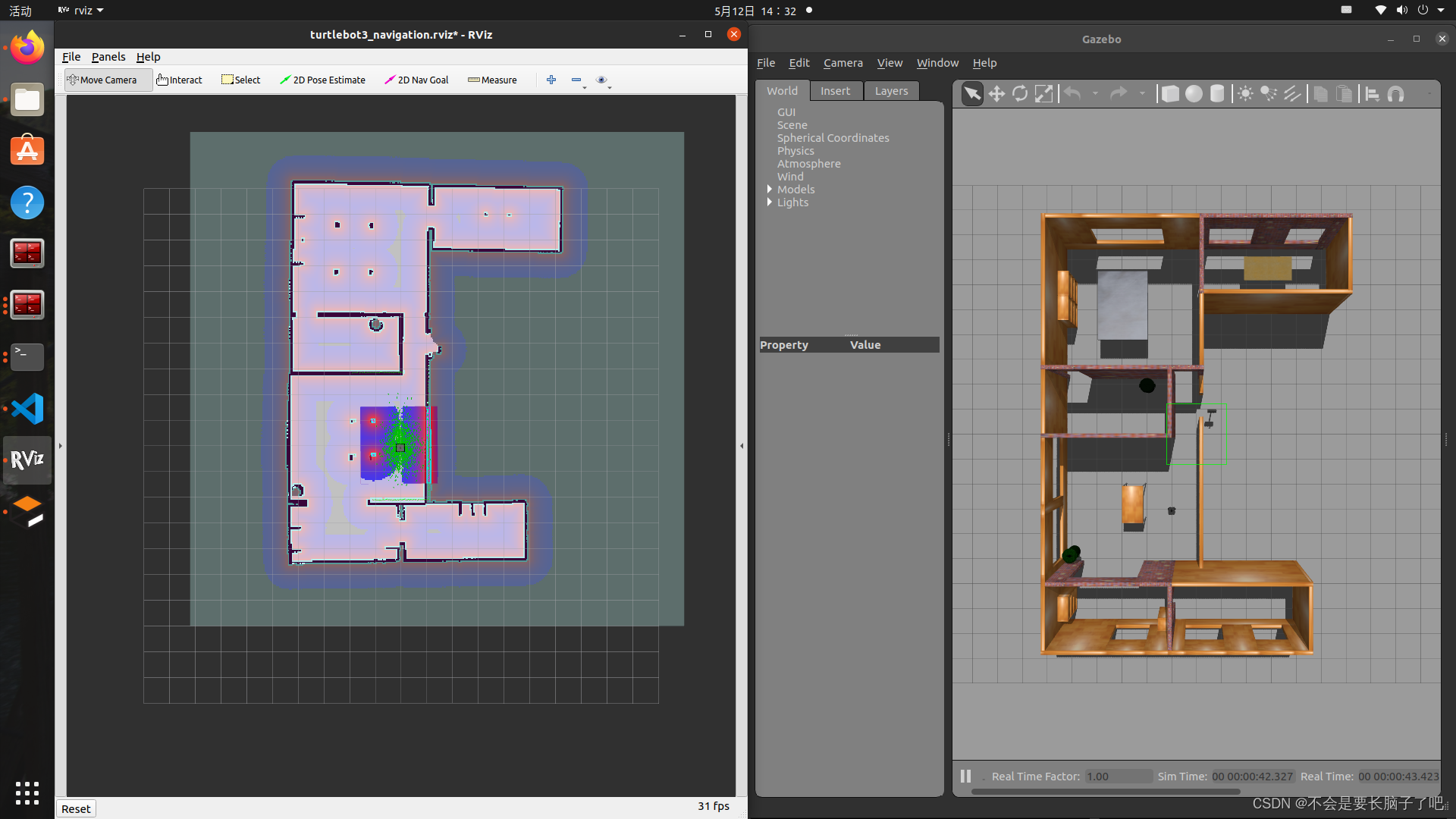
将其修改为合适值之后:
origin: [-7.00000, -11.00000, 0.000000]
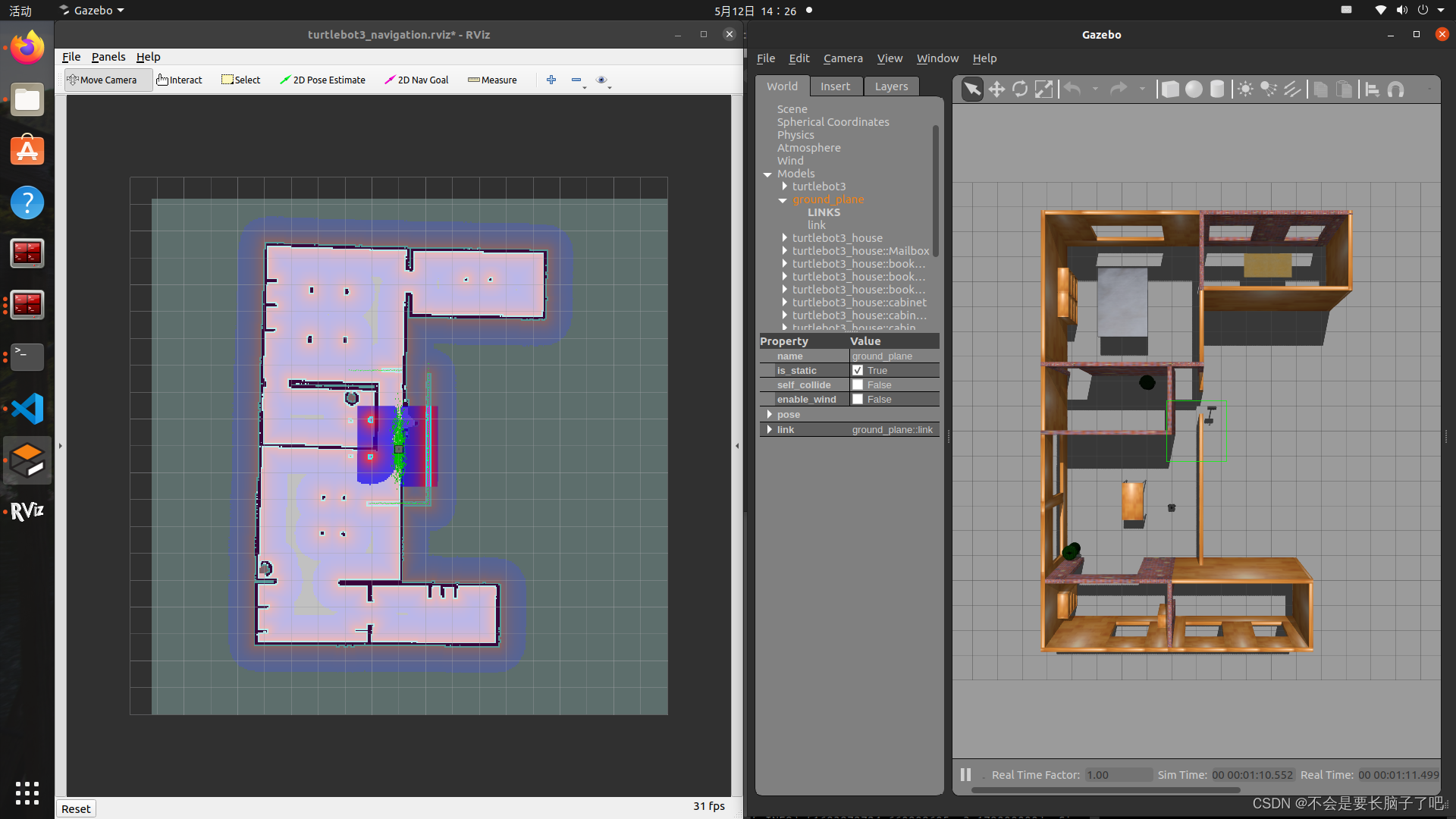
重新启动rviz,分别对比修改origin前修改origin后效果:
修改前:

修改后:
提示:在rviz可以添加Axes原点坐标系、左下角Reset重置、右上角2D Pose Estimate设置机器人初始位置