前言
当我们谈到现代科技的创新时,往往会联想到复杂的机器和高级的编程。但是,有一种小小的机器人正在以其独特之处引领着一场全新的革命,这就是toio™小机器人。尽管它的体积微小,但toio™小机器人却拥有令人难以置信的多功能性,它能够改变您对机器人的看法。在这篇文章中,我们将深入探讨toio™小机器人的创新功能,以及它如何将娱乐、教育和创意编程融为一体。
无论您是科技爱好者、家庭用户还是教育工作者,都将不禁被toio™小机器人所吸引。让我们一起来揭开这个微型机器人的神秘面纱,看看它是如何重新定义我们与科技互动的方式。
微型机器人的未来:toio™小机器人简介
toio™小机器人是一款令人惊叹的微型机器人,它以其独特的外观和出色的多功能性引领着机器人科技的发展。外观精致,体积微小,使其成为了一种非常可爱和便携的机器伴侣。然而,它的微型身材下隐藏着出色的功能,包括强大的运动控制、编程教育、多机协同和娱乐游戏。toio™小机器人不仅是一款有趣的娱乐设备,还是一种教育工具,它可以激发创造力和学习兴趣,为用户提供了一个全新的机器人体验。创新功能一览:

微型外观:toio™小机器人采用方块设计,尺寸微小,可轻松放置在手掌上。
多功能性:支持编程教育、多机协同和娱乐游戏,提供多样化的体验。
运动控制:具备精确的运动控制能力,可以在各种表面上自由移动。
教育工具:为孩子们提供了一个有趣的学习平台,培养了解编程的兴趣。
互动娱乐:支持多人游戏,为亲朋好友带来更多互动的机会。
toio™小机器人的创新性和多功能性使其成为了未来机器人科技的引领者,它将不断拓展我们对微型机器人的想象。
toio™小机器人:创新功能一览
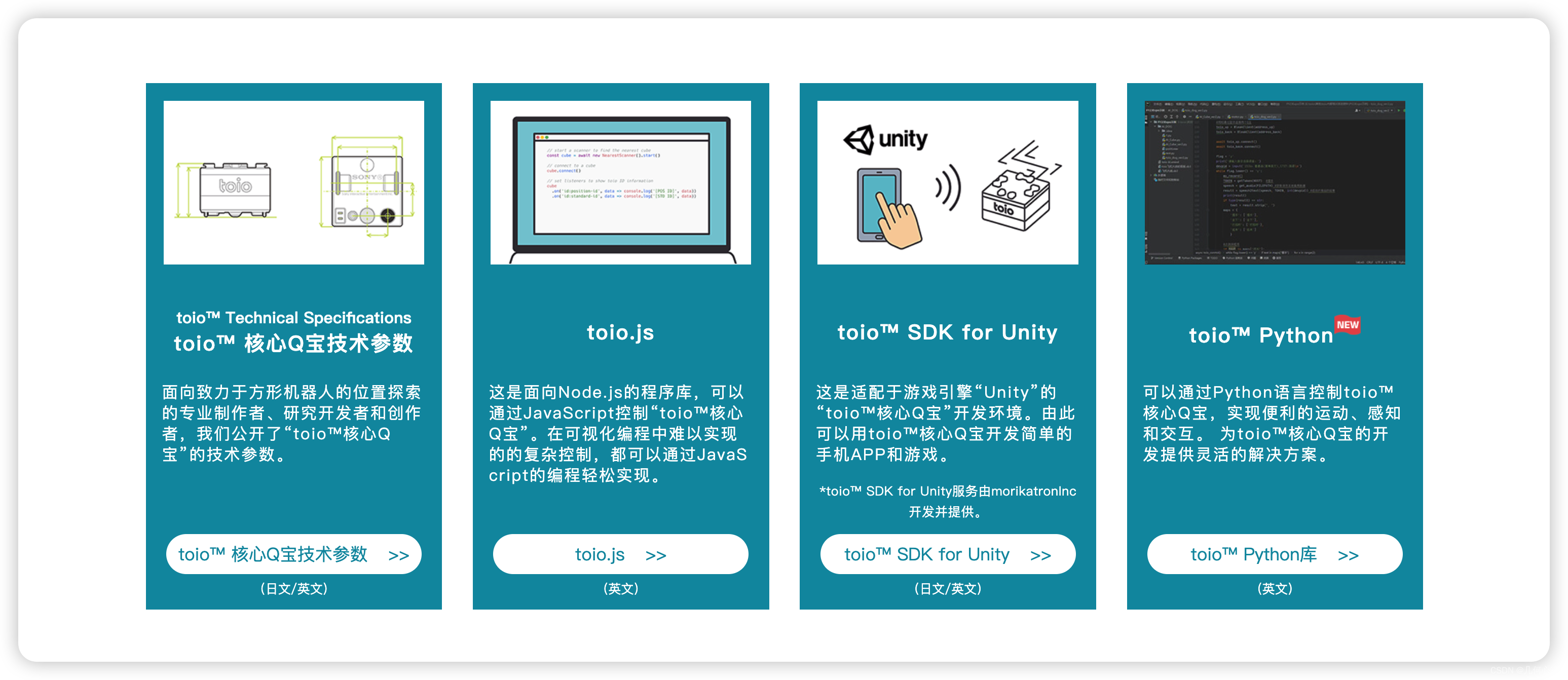
toio™小机器人是一款充满创新和多功能性的机器人,它不仅外形可爱,还具备令人惊叹的技术特点。尺寸小巧的toio™小机器人搭载了精密的传感器技术,包括位置传感器、角度传感器和接触传感器,从而实现了高精度的定位和运动控制。它的动力系统采用双轮驱动和可编程电机,可实现多种运动方式,并支持用户自定义编程。此外,toio™小机器人还支持与智能手机的蓝牙通信,通过专用的编程应用程序,用户可以轻松地探索编程和控制的乐趣。 toio™小机器人的这些独特功能使其成为了一个多才多艺的机器伴侣,适用于教育、娱乐和创造。
toio™小机器人:多领域的变革者
toio™小机器人是一项多功能的科技创新,不仅令人兴奋,还拥有广泛的应用场景,改变了我们的生活和工作方式。以下是toio™小机器人在教育、娱乐和创意编程领域的引人注目的应用。
教育创新:toio™小机器人在教育领域大放异彩。它不仅为学校提供了有趣的教育工具,还为孩子们提供了一个激发创造力和学习兴趣的平台。通过编程toio™小机器人,孩子们可以亲身体验编程的乐趣,学习解决问题的能力。这种互动性和娱乐性的学习方法已经在教育中取得了显著的成功,为培养下一代的科技领袖打下了坚实的基础。
娱乐新体验:toio™小机器人也为娱乐行业带来了新的可能性。无论是虚拟足球、赛车还是互动游戏,toio™小机器人都可以与用户互动,为他们带来丰富多彩的娱乐体验。在聚会上,toio™小机器人可以成为引人注目的娱乐项目,将亲朋好友聚在一起,创造难忘的时刻。
创意编程助力:toio™小机器人为创意编程爱好者提供了一个创新的平台。通过编写代码,用户可以控制toio™小机器人执行各种任务和动作。这种实践性的编程体验激发了创造力,使用户能够将自己的想法变成现实。toio™小机器人的灵活性和可编程性使其成为了一个令人兴奋的工具,将编程与实际操作相结合。
改变生活方式:toio™小机器人的多功能性已经改变了人们的生活和工作方式。它不再只是一个玩具,而是一个有用的工具,可以在各种领域发挥作用。教育、娱乐、创意编程等领域都受益于toio™小机器人的应用,它正在推动科技创新并改变着我们的日常生活。无论是在学校、家庭还是办公室,toio™小机器人都展示了未来机器人科技的巨大潜力。
toio™小机器人贪吃蛇游戏
使用toio™小机器人创建一个有趣的贪吃蛇游戏。toio™小机器人被用作蛇和食物的模拟,通过编程实现了游戏的核心逻辑。玩家可以观察蛇逐渐接近食物并吃掉它的过程,这是toio™小机器人在娱乐和编程教育中的有趣应用之一。
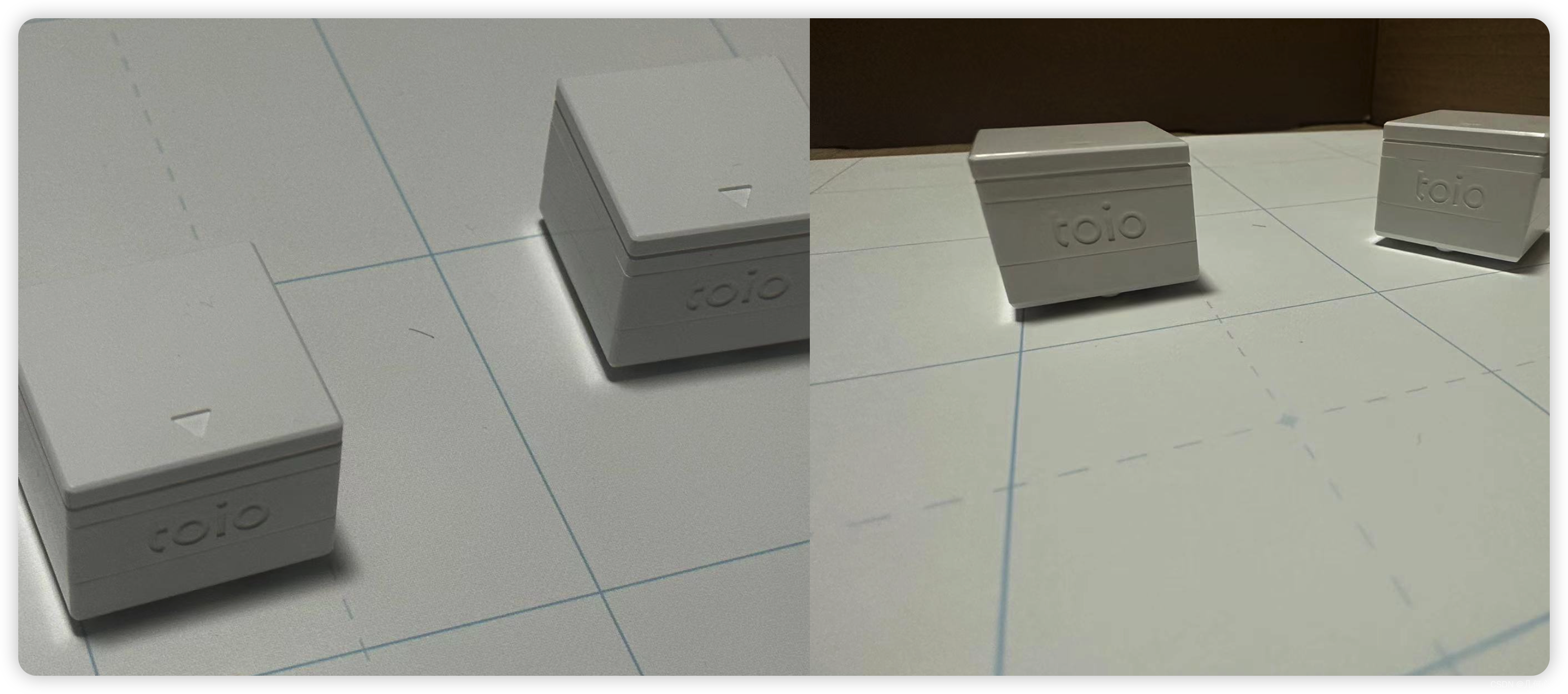
这个贪吃蛇游戏充分展示了toio™小机器人在娱乐和编程领域的多功能性。通过编写简单的代码,用户可以控制toio™小机器人,玩贪吃蛇这样经典的游戏,不仅增加了娱乐性,还培养了编程技能。这个示例代表了toio™小机器人在游戏开发和编程教育中的创新应用,为用户提供了一种全新的机器人体验。
代码实现
import asyncio
import random
from toio import *
async def connect_to_toio(device_name):
device_list = await BLEScanner.scan(1)
for device in device_list:
if device.name == device_name:
cube = ToioCoreCube(device.interface)
await cube.connect()
return cube
return None
async def move_to_random_position(cube, x, y):
await cube.api.motor.motor_control_target(
timeout=5,
movement_type=MovementType.Linear,
speed=Speed(max=100, speed_change_type=SpeedChangeType.AccelerationAndDeceleration),
target=TargetPosition(cube_location=CubeLocation(point=Point(x=x, y=y), angle=0),
rotation_option=RotationOption.AbsoluteOptimal),
)
async def game_loop():
while True:
# 连接两个 Toio 核心立方体,一个表示蛇,一个表示食物
snake_cube = await connect_to_toio("SnakeCube")
food_cube = await connect_to_toio("FoodCube")
if snake_cube is None or food_cube is None:
print("未找到设备")
return
# 生成随机位置作为食物的目标位置
random_x = random.randint(0, 300) # 随机生成 x 坐标
random_y = random.randint(0, 300) # 随机生成 y 坐标
# 移动食物到随机位置
await move_to_random_position(food_cube, random_x, random_y)
# 蛇的当前位置
snake_x, snake_y = 150, 150 # 初始位置
# 蛇每次移动的步长
step = 10
# 模拟蛇缓慢移动
while snake_x != random_x or snake_y != random_y:
# 计算下一步移动的方向
if snake_x < random_x:
snake_x += step
elif snake_x > random_x:
snake_x -= step
if snake_y < random_y:
snake_y += step
elif snake_y > random_y:
snake_y -= step
# 移动蛇到下一步位置
await snake_cube.api.motor.motor_control_target(
timeout=1,
movement_type=MovementType.Linear,
speed=Speed(max=100, speed_change_type=SpeedChangeType.AccelerationAndDeceleration),
target=TargetPosition(cube_location=CubeLocation(point=Point(x=snake_x, y=snake_y), angle=0),
rotation_option=RotationOption.AbsoluteOptimal),
)
print("蛇吃掉了食物!")
# 断开连接
await snake_cube.disconnect()
await food_cube.disconnect()
# 延迟一段时间后继续下一轮游戏
await asyncio.sleep(3)
async def main():
await game_loop()
if __name__ == "__main__":
asyncio.run(main())
-
首先,通过
connect_to_toio(device_name)函数连接两个toio™核心立方体,一个代表蛇(SnakeCube),另一个代表食物(FoodCube)。 -
接下来,生成随机的食物位置(
random_x和random_y),将食物toio™立方体移动到这个随机位置,模拟食物的生成。 -
蛇的初始位置设置为
(150, 150),并且定义了每次移动的步长(step)。 -
在游戏循环中,蛇不断尝试靠近食物,通过计算下一步的位置来移动。蛇每次只移动一小步,以模拟其缓慢的移动过程。
-
使用toio™小机器人的API,将蛇toio™立方体移动到下一步位置,以实现蛇的移动。
-
当蛇的位置与食物位置重合时,表示蛇吃掉了食物,游戏进程会打印消息。
-
最后,断开连接并等待一段时间后,游戏会重新开始。
写在最后
toio™小机器人代表了索尼在机器人科技领域的杰出成就,它不仅仅是一款创新的玩具,更是一项能够改变我们生活和学习方式的技术。通过引领我们进入一个充满创意和互动性的世界,toio™小机器人为我们带来了前所未有的体验。
无论是在教育领域激发孩子们对编程的兴趣,还是在娱乐领域提供与机器人的互动乐趣,toio™小机器人都展示了其多功能性和创新性。它不仅仅是一个机器人,更是一个教育工具、娱乐伙伴和创意编程平台。
为索尼公司的不断努力和创新精神点赞。希望未来toio™小机器人能够继续发展壮大,为我们带来更多令人惊叹的产品和体验。toio™小机器人是一个精彩的开始,我们期待着未来更多的精彩故事。