为了熟悉神经网络,搭建建议结构,简化大型网络。
1. Train.py
注:只要更改输入网络名称即可

2. 使用cifar10数据集
首先要完成数据集得解压
#把官网下载的cifar-10文件转化为图片保存在新建文件夹Train和Test中
import pickle
import glob
import os
import cv2
import numpy as np
#通过该函数可以拿到字典类型的数据,包含原始图片数据和label
def unpickle(file):
with open(file, 'rb') as fo:
dict = pickle.load(fo, encoding='bytes')
return dict
label_name= ["airplane",
"automobile",
"bird",
"cat",
"deer",
"dog",
"frog",
"horse",
"ship",
"truck"]
#通过glob:文件匹配的方式读取当前文件夹下相匹配的文件
train_list = glob.glob("—————————改成自己文件夹名称———————————————\Test_batch*") #data_batch_*-->Test_batch*
print(train_list)
save_path = "—————————改成自己文件夹名称———————————————\Test" #Train-->Test
for l in train_list:
print(l)
l_dict = unpickle(l)
#print(l_dict) #print all
print(l_dict.keys()) #dict_keys([b'batch_label', b'labels', b'data', b'filenames'])
for im_idx, im_data in enumerate(l_dict[b'data']): #enumerate() 函数用于将一个可遍历的数据对象(如列表、元组或字符串)组合为一个索引序列,同时列出数据和数据下标,一般用在 for 循环当中
#print(im_idx)
#print(im_data) #图片以向量的形式存在
#打印出索引值和图片,但是图片以向量形式表示,要reshape成为3X32X32,再对3这个维度进行交换,变为32X32X3
#利用索引值拿到label,name
im_label = l_dict[b'labels'][im_idx]
im_name = l_dict[b'filenames'][im_idx]
# print(im_label, im_name, im_data)
#将数据存放到新建的训练集文件夹下
im_label_name = label_name[im_label]
im_data = np.reshape(im_data, [3, 32, 32])
im_data = np.transpose(im_data, (1, 2, 0))
#cv2.imshow("im_data", cv2.resize(im_data, (200, 200)))
#cv2.waitKey(0)
#在Train文件夹下对每一个类创建一个文件夹
#os作用:如果不存在文件夹,则创建一个新的
if not os.path.exists("{}/{}".format(save_path,
im_label_name)):
os.mkdir("{}/{}".format(save_path, im_label_name))
#写入图片
cv2.imwrite("{}/{}/{}".format(save_path,
im_label_name,
im_name.decode("utf-8")), #此时im_name为byte型,要转化为字符串型,加decode
im_data)改文件夹的位置,先写入Train,再写入Test,即运行两次
3. VGG
import torch
import torch.nn as nn
import torch.nn.functional as F
class VGGbase(nn.Module):
def __init__(self):
super(VGGbase, self).__init__()
# 3 * 28 * 28 (经过crop之后 32 resize到 28)
self.conv1 = nn.Sequential( #序列容器,用于搭建神经网络的模块被按照被传入构造器的顺序添加到nn.Sequential()容器中
nn.Conv2d(3, 64, kernel_size=3, stride=1, padding=1), #输入通道为3,输出通道为64
nn.BatchNorm2d(64), #归一化处理,输出channel数64
nn.ReLU()
)
#卷积不改变图片大小,只改变维度
# 28 * 28
self.max_pooling1 = nn.MaxPool2d(kernel_size=2, stride=2)
# 14 * 14
self.conv2_1 = nn.Sequential(
nn.Conv2d(64, 128, kernel_size=3, stride=1, padding=1),
nn.BatchNorm2d(128),
nn.ReLU()
)
self.conv2_2 = nn.Sequential(
nn.Conv2d(128, 128, kernel_size=3, stride=1, padding=1),
nn.BatchNorm2d(128),
nn.ReLU()
)
self.max_pooling2 = nn.MaxPool2d(kernel_size=2, stride=2)
# 7 * 7
#遇上奇数,设置padding=1
self.conv3_1 = nn.Sequential(
nn.Conv2d(128, 256, kernel_size=3, stride=1, padding=1),
nn.BatchNorm2d(256),
nn.ReLU()
)
self.conv3_2 = nn.Sequential(
nn.Conv2d(256, 256, kernel_size=3, stride=1, padding=1),
nn.BatchNorm2d(256),
nn.ReLU()
)
self.max_pooling3 = nn.MaxPool2d(kernel_size=2, stride=2, padding=1)
# 4 * 4
self.conv4_1 = nn.Sequential(
nn.Conv2d(256, 512, kernel_size=3, stride=1, padding=1),
nn.BatchNorm2d(512),
nn.ReLU()
)
self.conv4_2 = nn.Sequential(
nn.Conv2d(512, 512, kernel_size=3, stride=1, padding=1),
nn.BatchNorm2d(512),
nn.ReLU()
)
self.max_pooling4 = nn.MaxPool2d(kernel_size=2, stride=2)
# 2 * 2
#定义FC层
# batchsize * 512 * 2 * 2 -->batchsize * (512 * 4)
self.fc = nn.Linear(512*4, 10) #nn.Linear(in_features, out_features)
#串联,构造分类网络
def forward(self, x):
batchsize = x.size(0) #第0维度的数据数量
out = self.conv1(x)
out = self.max_pooling1(out)
out = self.conv2_1(out)
out = self.conv2_2(out)
out = self.max_pooling2(out)
out = self.conv3_1(out)
out = self.conv3_2(out)
out = self.max_pooling3(out)
out = self.conv4_1(out)
out = self.conv4_2(out)
out = self.max_pooling4(out)
#展平
out = out.view(batchsize, -1) #-1:根据具体维度进行计算
#FC层
# batchsize * c * h * w --> batchsize * n
out = self.fc(out)
out = F.log_softmax(out, dim=1)
return out
def VGGNet():
return VGGbase()4. Resnet
"""
resnet 跳连结构
"""
import torch
import torch.nn as nn
import torch.nn.functional as F
class ResBlock(nn.Module):
def __init__(self, in_channel, out_channel, stride=1):
super(ResBlock, self).__init__()
#定义主干分支
self.layer = nn.Sequential(
nn.Conv2d(in_channel, out_channel, kernel_size=3, stride=stride, padding=1),
nn.BatchNorm2d(out_channel),
nn.ReLU(),
nn.Conv2d(out_channel, out_channel, kernel_size=3,stride=1,padding=1),
nn.BatchNorm2d(out_channel),
)
#定义跳连分支
self.shortcut = nn.Sequential()
if in_channel != out_channel or stride > 1:
#跳连分支,将输入的结果直连
self.shortcut=nn.Sequential(
nn.Conv2d(in_channel, out_channel, kernel_size=3, stride=stride, padding=1),
nn.BatchNorm2d(out_channel),
)
def forward(self, x):
out1 = self.layer(x)
out2 = self.shortcut(x)
out = out1 + out2
out = F.relu(out)
return out
class ResNet(nn.Module):
#对多个层的定义
def make_layer(self, block, out_channel, stride, num_block): #num_block表示定义多少个卷积层
layer_list = [] #存放相应的层
for i in range(num_block):
if i == 0:
in_stride = stride
else:
in_stride = 1
layer_list.append(block(self.in_channel, out_channel, in_stride))
self.in_channel = out_channel
return nn.Sequential(*layer_list)
def __init__(self, ResBlock):
super(ResNet, self).__init__()
self.in_channel = 32
self.conv1 = nn.Sequential(
nn.Conv2d(3, 32, kernel_size=3, stride=1, padding=1),
nn.BatchNorm2d(32),
nn.ReLU()
)
self.layer1 = self.make_layer(ResBlock, 64, 2, 2)
self.layer2 = self.make_layer(ResBlock, 128, 2, 2)
self.layer3 = self.make_layer(ResBlock, 256, 2, 2)
self.layer4 = self.make_layer(ResBlock, 512, 2, 2)
self.fc = nn.Linear(512, 10) #10个类别
def forward(self, x):
out = self.conv1(x)
out = self.layer1(out)
out = self.layer2(out)
out = self.layer3(out)
out = self.layer4(out)
out = F.avg_pool2d(out, 2) #输出结果转换为1 * 1
out = out.view(out.size(0), -1)
out = self.fc(out)
return out
def resnet():
return ResNet(ResBlock)
5. mobileNet
import torch
import torch.nn as nn
import torch.nn.functional as F
class mobilenet(nn.Module):
#mobilenet 基本单元
def conv_dw(self, in_channel, out_channel, stride):
return nn.Sequential(
nn.Conv2d(in_channel, in_channel, kernel_size=3, stride=stride, padding=1, groups=in_channel, bias=False),
nn.BatchNorm2d(in_channel),
nn.ReLU(),
nn.Conv2d(in_channel, out_channel, kernel_size=1, stride=1, padding=0, bias=False),
nn.BatchNorm2d(out_channel),
nn.ReLU(),
)
def __init__(self):
#核心算子的定义
super(mobilenet, self).__init__()
self.conv1 = nn.Sequential( # 序列容器,用于搭建神经网络的模块被按照被传入构造器的顺序添加到nn.Sequential()容器中
nn.Conv2d(3, 32, kernel_size=3, stride=1, padding=1), # 输入通道为3,输出通道为64
nn.BatchNorm2d(32), # 归一化处理,输出channel数64
nn.ReLU()
)
self.conv_dw2 = self.conv_dw(32, 32, 1)
self.conv_dw3 = self.conv_dw(32, 64, 2) #进行一次下采样
self.conv_dw4 = self.conv_dw(64, 64, 1)
self.conv_dw5 = self.conv_dw(64, 128, 2)
self.conv_dw6 = self.conv_dw(128, 128, 1)
self.conv_dw7 = self.conv_dw(128, 256, 2)
self.conv_dw8 = self.conv_dw(256, 256, 1)
self.conv_dw9 = self.conv_dw(256, 512, 2)
#以上conv_dw(*, *, 2) 4个2,即进行2^4=16倍的下采样
self.fc = nn.Linear(512,10)
#对以上算子进行串联,完成前项运算
def forward(self, x):
out = self.conv1(x)
out = self.conv_dw2(out)
out = self.conv_dw3(out)
out = self.conv_dw4(out)
out = self.conv_dw5(out)
out = self.conv_dw6(out)
out = self.conv_dw7(out)
out = self.conv_dw8(out)
out = self.conv_dw9(out)
out = F.avg_pool2d(out, 2) #上面16倍的下采样,此处采用2 * 2 的&进行average pooling
out = out.view(-1, 512) #转为2维图
out = self.fc(out) #对5122维向10维分布转化
return out
def mobilenetv1_small():
return mobilenet()
6. inceptionNet
import torch
import torch.nn as nn
import torch.nn.functional as F
"""
input: A
对于resnet
B = A + f(A) 为保证A 和 f(A) 的feature map特征图相同
所以
B = g(A) + f(A)
g(A): 对A进行判断:如果输入channel和输出channel不相同,或者stride > 2, 对A进行卷积运算,保证和输出的特征图大小一致
______________________________________________________________________________________________________
对于inception
对输入A进行不同的卷积和pooling运算,得到不同的结果后(B1, B2, B3...)进行串联
B1 = f1(A)
B2 = f2(A)
B3 = f3(A)
B4 = f4(A)
concat([B1, B2, B3, B4])
"""
def ConvBNRelu(in_channel, out_channel, kernel_size):
return nn.Sequential(
nn.Conv2d(in_channel, out_channel, kernel_size=kernel_size, stride=1, padding=kernel_size//2), # //2:整除,得商kernel_size=3, padding=1; kernel_size=5, padding=2; kernel_size=7, padding=3
nn.BatchNorm2d(out_channel), # 归一化处理,输出channel数64
nn.ReLU()
)
class BaseInception(nn.Module):
def __init__(self, in_channel, out_channel_list, reduce_channel_list):
super(BaseInception, self).__init__()
self.branch1_conv = ConvBNRelu(in_channel, out_channel_list[0], 1)
self.branch2_conv1 = ConvBNRelu(in_channel, reduce_channel_list[0], 1) #压缩
self.branch2_conv2 = ConvBNRelu(reduce_channel_list[0], out_channel_list[1], 3)
self.branch3_conv1 = ConvBNRelu(in_channel, reduce_channel_list[1], 1)
self.branch3_conv2 = ConvBNRelu(reduce_channel_list[1], out_channel_list[2], 5)
self.branch4_pool = nn.MaxPool2d(kernel_size=3, stride=1, padding=1)
self.branch4_conv = ConvBNRelu(in_channel, out_channel_list[3], 3)
def forward(self, x):
out1 = self.branch1_conv(x)
out2 = self.branch2_conv1(x)
out2 = self.branch2_conv2(out2)
out3 = self.branch3_conv1(x)
out3 = self.branch3_conv2(out3)
out4 = self.branch4_pool(x)
out4 = self.branch4_conv(out4)
out = torch.cat([out1, out2, out3, out4], dim=1)
return out
class InceptionNet(nn.Module):
#初始化
def __init__(self):
super(InceptionNet, self).__init__()
self.block1 = nn.Sequential(
nn.Conv2d(3, 64, kernel_size=7, stride=2, padding=1),
nn.BatchNorm2d(64),
nn.ReLU()
)
self.block2 = nn.Sequential(
nn.Conv2d(64, 128, kernel_size=3, stride=2, padding=1),
nn.BatchNorm2d(128),
nn.ReLU()
)
self.block3 = nn.Sequential(
BaseInception(in_channel=128, out_channel_list=[64, 64, 64, 64], reduce_channel_list=[16, 16]),
nn.MaxPool2d(kernel_size=3, stride=2, padding=1)
)
self.block4 = nn.Sequential(
BaseInception(in_channel=256, out_channel_list=[96, 96, 96, 96], reduce_channel_list=[32, 32]),
nn.MaxPool2d(kernel_size=3, stride=2, padding=1)
)
self.fc = nn.Linear(384, 10) #96 * 4 = 384
#组装算子,完成前向推理
def forward(self, x):
out = self.block1(x)
out = self.block2(out)
out = self.block3(out)
out = self.block4(out)
out = F.avg_pool2d(out, 2)
out = out.view(out.size(0), -1)
out = self.fc(out)
return out
def InceptionNetSmall():
return InceptionNet()
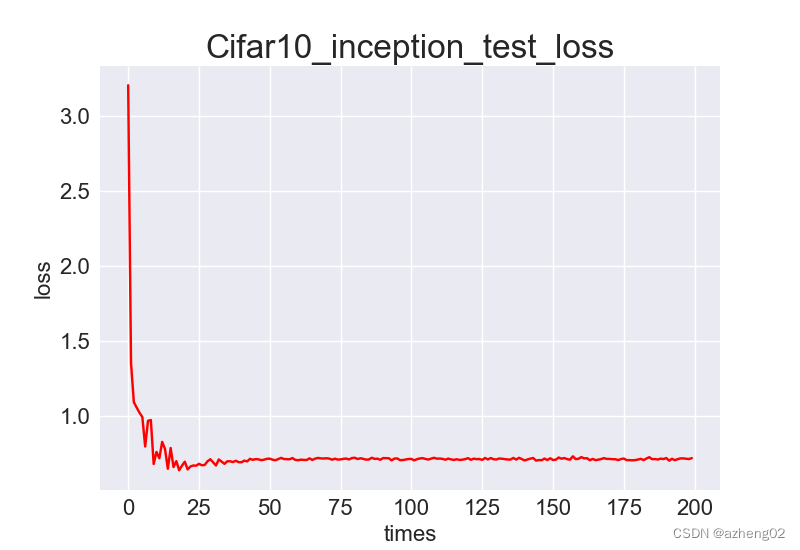
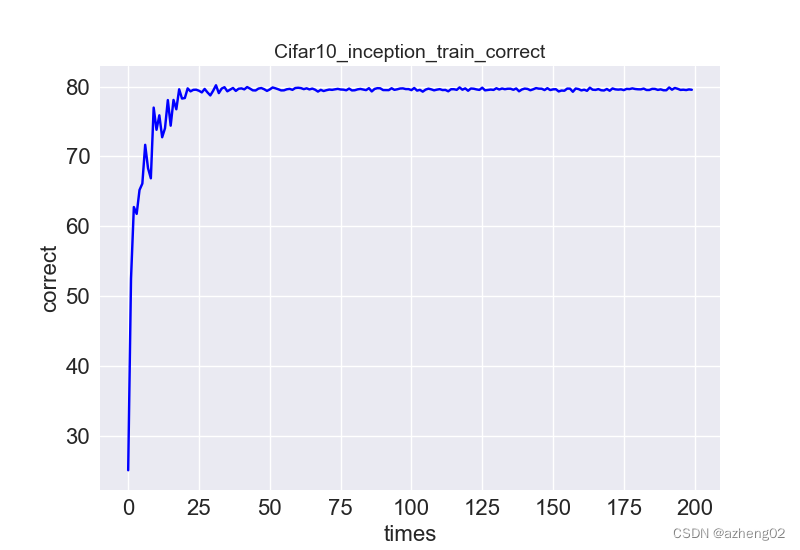
运行结果(Test)
VGG


resnet


mobileNet


inceptionNet