尝试用IDE PyCharm来写ROS代码。首先遇到的就是环境配置问题了。
我们在PyCharm中建立一个test.py文件,输入import rospy,提示"No module named rospy"。
- source /opt/ros/kenitic/setup.bash
- echo "source /opt/ros/kenitic/setup.bash" >> ~/.bashrc
- source ~/.bashrc
方法1:
参照ros官网给出的方法:http://wiki.ros.org/IDEs。
我们可以在/usr/share/applications/文件夹下,或者在~/.local/share/applications/文件夹下,找到jetbrains-pycharm-ce.desktop。这取决于当时安装PyCharm时候的选项,是选择的为所有用户安装(/usr/share/applications/),还是为当前用户安装(~/.local/share/applications/)。
打开这个文件,并按照下面的方法进行修改:
- Exec = /...
- Exec = bash -i -c “/..." %f
这就相当于我们在打开PyCharm之前先source了我们的/.bashrc文件。
点击PyChram快捷方法打开即可。
方法2:
按照方法1中的说法,我们只需要在打开PyCharm前source了/.bashrc即可。
首先打开一个shell,因为我们已经配置了/.bashrc文件,所以每当我的当前用户打开shell时,都会自动source /opt/ros/indigo/setup.bash。
然后在该shell下cd到PyCharm的pycharm.sh文件夹,输入命令./pycharm.sh,打开PyCharm即可。
这种方法的缺点是每次打开要自己输入./pycharm.sh,而不能从快捷方式打开。
方法3:
在PyCharm的Run->Debug->Edit Configuration->Configuration->Environment variable中添加PYTHONPATH变量,加入ros相关路径。这种方法我并未测试。
pycharm自己是不支持launch文件的,但是我们还是希望用ide实现编写,例如这样:
具体做法就是在file/settings里面打开File Types 选中XML
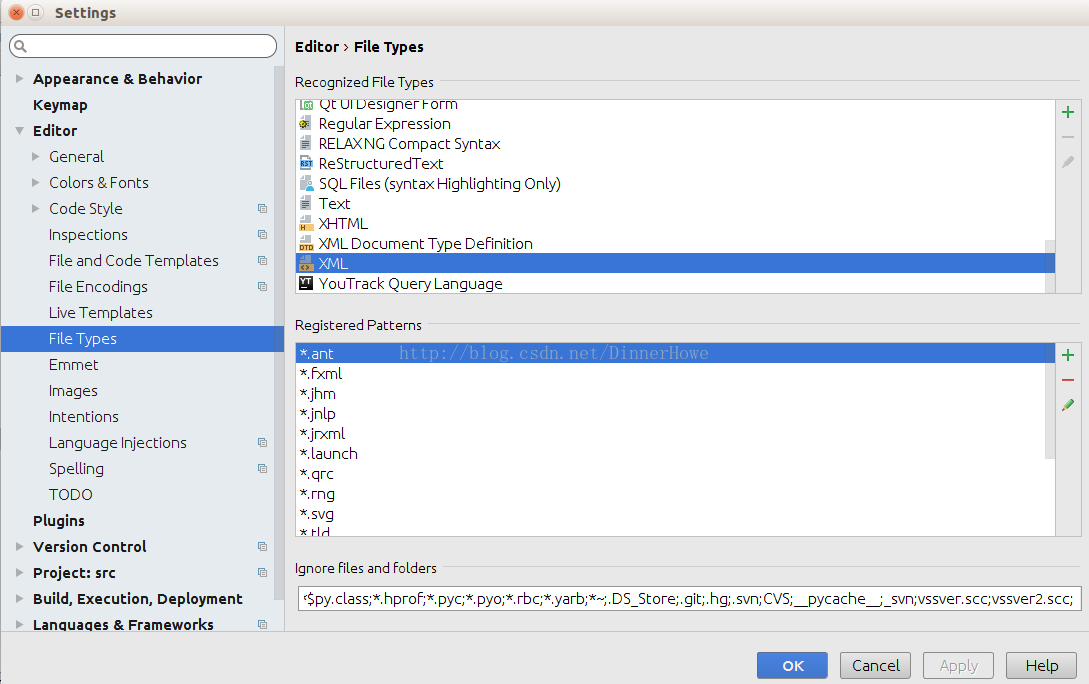
然后在registered patterns里面添加*.launch文件,点ok完成launch文件的关联