参考的资料有:
1、KUKA youbot机械臂与Moveit工具包(2):http://blog.csdn.net/yaked/article/details/45621517
2、如何利用ROS MoveIt快速搭建机器人运动规划平台:https://www.leiphone.com/news/201612/nxlXgriSLasNgAcX.html?viewType=weixin
3、ROS 运动规划 (Motion Planning): MoveIt! 与 OMPL:http://blog.csdn.net/improve100/article/details/50619925
4、ros论坛:https://answers.ros.org/question/240723/fail-aborted-no-motion-plan-found-no-execution-attempted/
一、逆运动学求解遇到的问题
1、给出末端执行器的位姿参数,就是position(x,y,z)、orientation(x,y,z,w)在确定位置可达的情况下还是无法求出逆解。Fail: ABORTED: No motion plan found. No execution attempted

2、博客资料里说的方法都尝试过,包括配置ikfast,但是我跟博客作者一样没有配置成功,后来从"ROS 运动规划 (Motion Planning): MoveIt! 与 OMPL"下载了urdf文件,进行配置测试,发现可以求解逆运动学,于是我开始新建一个机械臂的urdf文件。
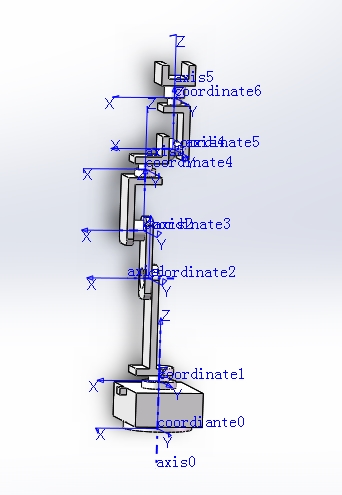
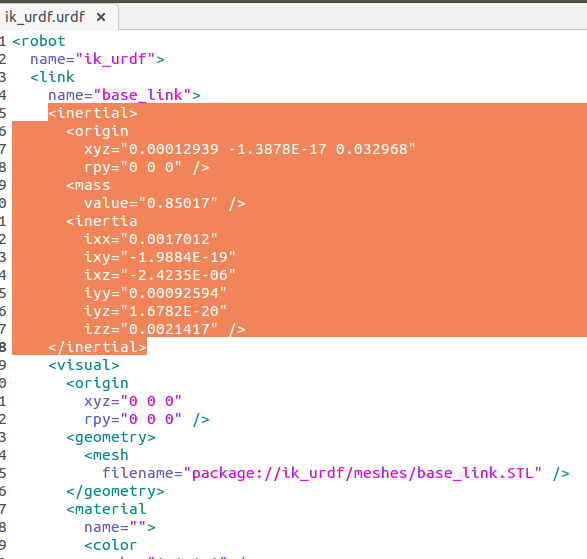
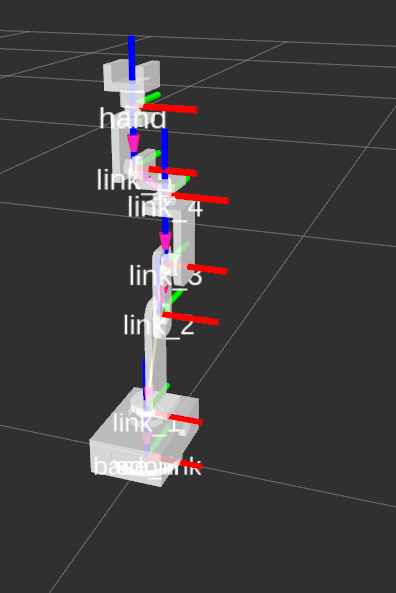
1、用SolidWorks建立一个6自由度的机械臂模型,并且通过urdf插件生成ik_urdf包。
需要注意的是:link、joint坐标系设置尽量满足所有关节为0°时候,所有坐标系同姿态(这样可以避免引入pi)

三、通过moveit设置助手生成moveit配置文件ik_urdf_moveit_config
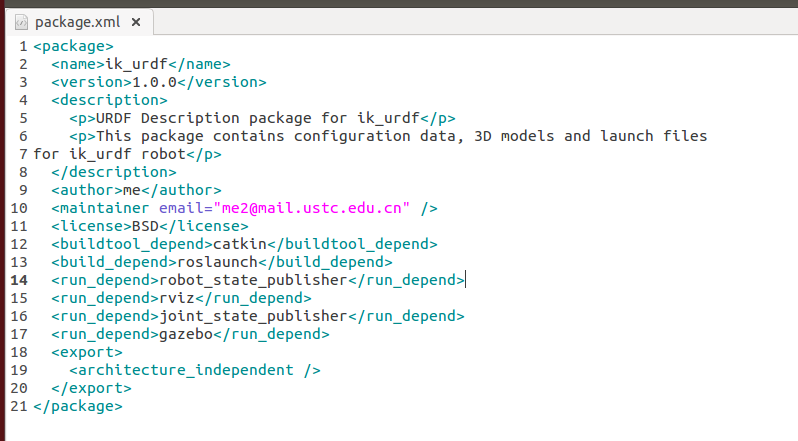
1、 修改package.xml的作者邮箱信息,原来的邮箱格式不正确
2、 删除urdf文件中base_link的inertia标签,base_link不需要定义惯性属性
3、 根据需要roslaunch的文件做一些文件目录的修改(比如做机械臂导航时遇到的问题2:solidworks用sw_urdf插件生成urdf文件包后,需要修改的部分)
(4.1) 新建启动arbotix节点文件:ik_urdf_arbotix.launch文件
我们将(做机械臂导航时遇到的问题7:正向运动学求解:在关节空间进行规划)中的my_robot_arbotix_ok.launch文件复制到urdf包内的launch文件夹下,命名ik_urdf_arbotix.launch,修改完成后的代码如下:
<launch>
<!-- Make sure we are not using simulated time -->
<param name="/use_sim_time" value="false" />
<!-- Launch the arbotix driver in fake mode by default -->
<arg name="sim" default="true" />
<!-- If using a real controller, look on /dev/ttyUSB0 by default -->
<arg name="port" default="/dev/ttyUSB0" />
<!-- Load the URDF/Xacro model of our robot -->
<param name="robot_description" textfile="/home/xs/catkin_ws2/src/ik_urdf/urdf/ik_urdf.urdf" />
<!-- Bring up the arbotix driver with a configuration file appropriate to the robot -->
<node name="arbotix" pkg="arbotix_python" type="arbotix_driver" clear_params="true" output="screen">
<rosparam file="/home/xs/catkin_ws2/src/ik_urdf/config/ik_urdf_arbotix.yaml" command="load" />
<param name="sim" value="$(arg sim)" />
<param name="port" value="$(arg port)" />
</node>
<!--
Run a separate controller for the one sided gripper
<node name="right_gripper_controller" pkg="arbotix_controllers" type="gripper_controller" output="screen">
<rosparam>
model: singlesided
invert: true
center: 0.0
pad_width: 0.004
finger_length: 0.065
min_opening: -0.8
max_opening: 0.5
joint: right_gripper_finger_joint
</rosparam>
</node>
-->
<!-- Load the URDF, SRDF and other .yaml configuration files on the param server -->
<include file="$(find ik_urdf_moveit_config)/launch/planning_context.launch">
<arg name="load_robot_description" value="true"/>
</include>
<!-- If needed, broadcast static tf for robot root -->
<node pkg="tf" type="static_transform_publisher" name="virtual_joint_broadcaster_0" args="0 0 0 0 0 0 odom base_link 100" />
<!-- We do not have a robot connected, so publish fake joint states >
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher">
<param name="/use_gui" value="false"/>
<rosparam param="/source_list">[/move_group/fake_controller_joint_states]</rosparam>
</node-->
<!-- Publish the robot state -->
<node name="robot_state_publisher" pkg="robot_state_publisher" type="state_publisher">
<param name="publish_frequency" type="double" value="20.0" />
</node>
<!-- By default, we are not in debug mode >
<arg name="debug" default="false" /-->
<!-- Run the main MoveIt executable without trajectory execution (we do not have controllers configured by default) >
<include file="$(find ik_urdf_moveit_config)/launch/move_group.launch">
<arg name="allow_trajectory_execution" value="true"/>
<arg name="fake_execution" value="true"/>
<arg name="info" value="true"/>
<arg name="debug" value="$(arg debug)"/>
</include-->
<!--
<node
name="rviz"
pkg="rviz"
type="rviz"
args="-d /home/xs/catkin_ws2/src/robot_arm/my_moveit.rviz"
/>
-->
<!--
args="-d /home/xs/catkin_ws2/src/robot_arm/urdf.rviz"
args="-d /home/xs/catkin_ws2/src/robot_arm/arm_nav_my.rviz"
-->
<!-- Start all servos in a relaxed state -->
<node pkg="rbx2_dynamixels" type="arbotix_relax_all_servos.py" name="relax_all_servos" unless="$(arg sim)" />
<!-- Load diagnostics -->
<node pkg="diagnostic_aggregator" type="aggregator_node" name="diagnostic_aggregator" clear_params="true" unless="$(arg sim)">
<rosparam command="load" file="$(find rbx2_dynamixels)/config/dynamixel_diagnostics.yaml" />
</node>
<node pkg="rqt_robot_monitor" type="rqt_robot_monitor" name="rqt_robot_monitor" unless="$(arg sim)" />
</launch>
(4.2)配置arbotix配置文件:ik_urdf_arbotix.yaml
我将配置文件ik_urdf_arbotix.yaml保存在urdf包ik_urdf中的config文件夹内,根据机械臂的关节修改完成后如下,注意controller的命名与action_name,这里应该与moveit的controllers.yaml里定义的action_ns一致。
port: /dev/ttyUSB0
baud: 1000000
rate: 100
sync_write: True
sync_read: False
read_rate: 10
write_rate: 10
joints: {
joint_1: {id: 1, neutral: 512, min_angle: -90, max_angle: 90},
joint_2: {id: 2, neutral: 512, min_angle: -90, max_angle: 90},
joint_3: {id: 3, neutral: 512, min_angle: -90, max_angle: 90},
joint_4: {id: 4, neutral: 512, min_angle: -90, max_angle: 90},
joint_5: {id: 5, neutral: 512, min_angle: -90, max_angle: 90},
hand_joint: {id: 6, neutral: 512, min_angle: -90, max_angle: 90}
}
controllers: {
# base_controller: {type: diff_controller, base_frame_id: base_footprint, base_width: 0.26, ticks_meter: 4100, Kp: 12, Kd: 12, Ki: 0, Ko: 50, accel_limit: 1.0 },
ik_arm_controller: {onboard: False, action_name: ik_arm_controller/follow_joint_trajectory, type: follow_controller, joints: [ joint_1, joint_2, joint_3,joint_4,joint_5,hand_joint]}
}
5、 配置moveit关节轨迹控制器(类似于 做机械臂导航时遇到的问题7:正向运动学求解:在关节空间进行规划)
(5.1)创建controllers.yaml文件
在moveit配置文件ik_urdf_moveit_config包下的config文件夹内创建controllers.yaml文件,暂时没有用到gripper的控制文件,注意controller_list的name和action_ns,应与(4.2节)arbotix配置文件:ik_urdf_arbotix.yaml一致
controller_list:
- name: ik_arm_controller
action_ns: follow_joint_trajectory
type: FollowJointTrajectory
default: true
joints:
- joint_1
- joint_2
- joint_3
- joint_4
- joint_5
- hand_joint
# - name: right_gripper_controller
# action_ns: gripper_action
# type: GripperCommand
# default: true
# joints:
# - hand_joint
(5.2)添加控制器启动文件:ik_urdf_moveit_controller_manager.launch.yaml
该文件在moveit配置文件ik_urdf_moveit_config包下的launch文件夹内。修改后的内容如下,注意加载的controllers.yaml的目录
<launch> <!-- Set the param that trajectory_execution_manager needs to find the controller plugin --> <arg name="moveit_controller_manager" default="moveit_simple_controller_manager/MoveItSimpleControllerManager" /> <param name="moveit_controller_manager" value="$(arg moveit_controller_manager)"/> <!-- load controller_list --> <rosparam file="$(find ik_urdf_moveit_config)/config/controllers.yaml"/> </launch>
五、进行逆运动学求解
配置上述文件后需要catkin_make和source devel/setup.bash
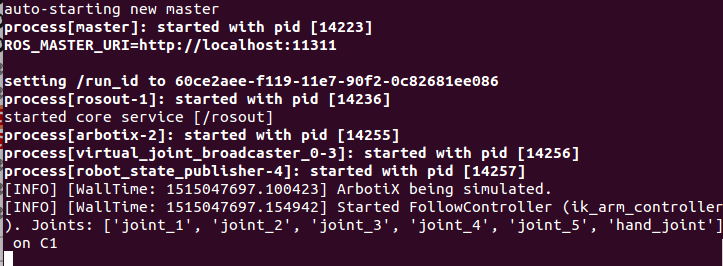
1、用arbotix关节控制器启动虚拟机械臂模型,就是(4.1)的配置文件
xs@xs-PC:~/catkin_ws2/src/ik_urdf/launch$ roslaunch ik_urdf_arbotix.launch
2、启动move_group
xs@xs-PC:~/catkin_ws2/src/ik_urdf_moveit_config/launch$ roslaunch move_group.launch
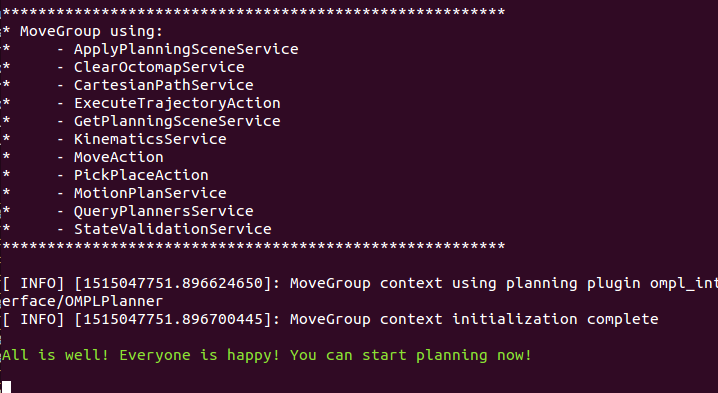
这个move_group.launch在moveit配置文件的launch目录下,文件启动的节点和服务都是moveit用来和机械臂交互的
<launch>
<include file="$(find ik_urdf_moveit_config)/launch/planning_context.launch" />
<!-- GDB Debug Option -->
<arg name="debug" default="false" />
<arg unless="$(arg debug)" name="launch_prefix" value="" />
<arg if="$(arg debug)" name="launch_prefix"
value="gdb -x $(find ik_urdf_moveit_config)/launch/gdb_settings.gdb --ex run --args" />
<!-- Verbose Mode Option -->
<arg name="info" default="$(arg debug)" />
<arg unless="$(arg info)" name="command_args" value="" />
<arg if="$(arg info)" name="command_args" value="--debug" />
<!-- move_group settings -->
<arg name="allow_trajectory_execution" default="true"/>
<arg name="fake_execution" default="false"/>
<arg name="max_safe_path_cost" default="1"/>
<arg name="jiggle_fraction" default="0.05" />
<arg name="publish_monitored_planning_scene" default="true"/>
<!-- Planning Functionality -->
<include ns="move_group" file="$(find ik_urdf_moveit_config)/launch/planning_pipeline.launch.xml">
<arg name="pipeline" value="ompl" />
</include>
<!-- Trajectory Execution Functionality -->
<include ns="move_group" file="$(find ik_urdf_moveit_config)/launch/trajectory_execution.launch.xml" if="$(arg allow_trajectory_execution)">
<arg name="moveit_manage_controllers" value="true" />
<arg name="moveit_controller_manager" value="ik_urdf" unless="$(arg fake_execution)"/>
<arg name="moveit_controller_manager" value="fake" if="$(arg fake_execution)"/>
</include>
<!-- Sensors Functionality -->
<include ns="move_group" file="$(find ik_urdf_moveit_config)/launch/sensor_manager.launch.xml" if="$(arg allow_trajectory_execution)">
<arg name="moveit_sensor_manager" value="ik_urdf" />
</include>
<!-- Start the actual move_group node/action server -->
<node name="move_group" launch-prefix="$(arg launch_prefix)" pkg="moveit_ros_move_group" type="move_group" respawn="false" output="screen" args="$(arg command_args)">
<!-- Set the display variable, in case OpenGL code is used internally -->
<env name="DISPLAY" value="$(optenv DISPLAY :0)" />
<param name="allow_trajectory_execution" value="$(arg allow_trajectory_execution)"/>
<param name="max_safe_path_cost" value="$(arg max_safe_path_cost)"/>
<param name="jiggle_fraction" value="$(arg jiggle_fraction)" />
<!-- load these non-default MoveGroup capabilities -->
<!--
<param name="capabilities" value="
a_package/AwsomeMotionPlanningCapability
another_package/GraspPlanningPipeline
" />
-->
<!-- inhibit these default MoveGroup capabilities -->
<!--
<param name="disable_capabilities" value="
move_group/MoveGroupKinematicsService
move_group/ClearOctomapService
" />
-->
<!-- Publish the planning scene of the physical robot so that rviz plugin can know actual robot -->
<param name="planning_scene_monitor/publish_planning_scene" value="$(arg publish_monitored_planning_scene)" />
<param name="planning_scene_monitor/publish_geometry_updates" value="$(arg publish_monitored_planning_scene)" />
<param name="planning_scene_monitor/publish_state_updates" value="$(arg publish_monitored_planning_scene)" />
<param name="planning_scene_monitor/publish_transforms_updates" value="$(arg publish_monitored_planning_scene)" />
</node>
</launch>
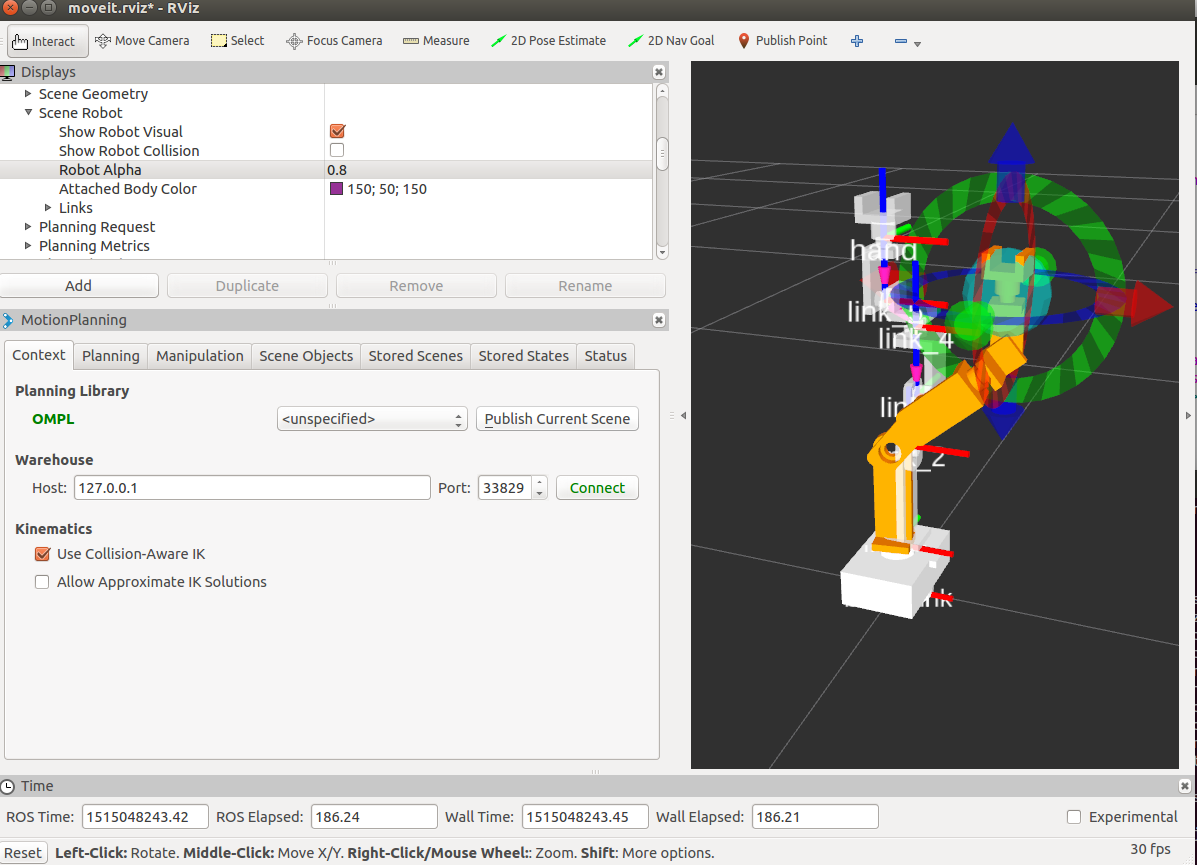
3、启动rviz, rviz文件在ik_urdf_moveit_config包内launch文件夹下
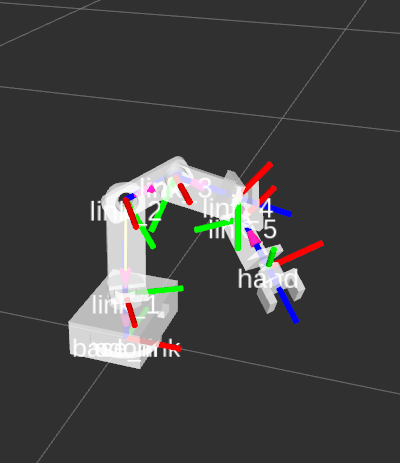
xs@xs-PC:~$ rosrun rviz rviz -d 'rospack find ik_urdf_moveit_config'/moveit.rviz我们可以通过交互标记进行拖动修改机械臂位姿,说明可以进行逆运动学求解,每一次移动标记,就运行了一次逆运动学IK求解过程。
4、运行逆运动学求解的脚本
xs@xs-PC:~$ rosrun rbx2_arm_nav moveit_ikikikik_demo.py
其中机械臂先进行正运动学求解到达设定位置,再进行逆运动学求解到达指定位置,逆运动学的目标位置,可以自己设定position、orientation,也可以通过函数获取某一姿态的位姿,通过赋值的方式给定。最终机械臂能顺利求解出逆解并执行。
#!/usr/bin/env python
"""
moveit_ik_demo.py - Version 0.1 2014-01-14
Use inverse kinemtatics to move the end effector to a specified pose
Created for the Pi Robot Project: http://www.pirobot.org
Copyright (c) 2014 Patrick Goebel. All rights reserved.
This program is free software; you can redistribute it and/or modify
it under the terms of the GNU General Public License as published by
the Free Software Foundation; either version 2 of the License, or
(at your option) any later version.5
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU General Public License for more details at:
http://www.gnu.org/licenses/gpl.html
"""
import rospy, sys
import moveit_commander
from moveit_msgs.msg import RobotTrajectory
from trajectory_msgs.msg import JointTrajectoryPoint
from geometry_msgs.msg import PoseStamped, Pose
from tf.transformations import euler_from_quaternion, quaternion_from_euler
class MoveItDemo:
def __init__(self):
# Initialize the move_group API
moveit_commander.roscpp_initialize(sys.argv)
rospy.init_node('moveit_demo')
# Initialize the move group for the right arm
right_arm = moveit_commander.MoveGroupCommander('arm')
# Get the name of the end-effector link
end_effector_link = right_arm.get_end_effector_link()
# Display the name of the end_effector link
rospy.loginfo("The end effector link is: " + str(end_effector_link))
# Set the reference frame for pose targets
reference_frame = 'base_link'
# Set the right arm reference frame accordingly
right_arm.set_pose_reference_frame(reference_frame)
# Allow replanning to increase the odds of a solution
right_arm.allow_replanning(True)
# Allow some leeway in position (meters) and orientation (radians)
right_arm.set_goal_position_tolerance(0.01)
right_arm.set_goal_orientation_tolerance(0.05)
# Start the arm in the "resting" pose stored in the SRDF file
right_arm.set_named_target('resting')
right_arm.go()
#traj0 = right_arm.plan()
# Execute the planned trajectory
#right_arm.execute(traj0)
rospy.loginfo("resting resting resting resting resting")
rospy.sleep(1)
joint_positions = [-1.0, -1.0, -1.0,-1.0, -1.0, -1.0]
# Set the arm's goal configuration to the be the joint positions
right_arm.set_joint_value_target(joint_positions)
rospy.loginfo("0000 set_fk_target_completed 0000 ")
# Plan and execute the motion
######robot_arm.go()
traj = right_arm.plan()
#rospy.loginfo("11111111111111111111111111 "+ str(traj))
# Execute the planned trajectory
right_arm.execute(traj)
current_pose = right_arm.get_current_pose(end_effector_link)
#rospy.loginfo("1111 execute traj completed 1111 \n "+ str(current_pose))
rospy.loginfo("1111 execute traj completed 1111 \n ")
rospy.sleep(1)
# Get the end-effector pose
ee_pose = right_arm.get_current_pose(end_effector_link)
# Display the end-effector pose
rospy.loginfo("End effector target pose:\n" + str(ee_pose))
#rospy.loginfo("eeeeeeeeeeeeeeeeeee:\n" + str(ee_pose.pose.position.x))
# Start the arm in the "resting" pose stored in the SRDF file
right_arm.set_named_target('forward')
right_arm.go()
#traj0 = right_arm.plan()
# Execute the planned trajectory
#right_arm.execute(traj0)
rospy.loginfo("forward forward forward forward forward")
rospy.sleep(1)
# Set the target pose. This particular pose has the gripper oriented horizontally
# 0.85 meters above the ground, 0.10 meters to the right and 0.20 meters ahead of
# the center of the robot base.
target_pose = PoseStamped()
target_pose.header.frame_id = reference_frame
target_pose.header.stamp = rospy.Time.now()
target_pose.pose.position.x =ee_pose.pose.position.x
target_pose.pose.position.y =ee_pose.pose.position.y
target_pose.pose.position.z =ee_pose.pose.position.z
target_pose.pose.orientation.x =ee_pose.pose.orientation.x
target_pose.pose.orientation.y =ee_pose.pose.orientation.y
target_pose.pose.orientation.z =ee_pose.pose.orientation.z
target_pose.pose.orientation.w =ee_pose.pose.orientation.w
'''
target_pose.pose.position.x =0.18188
target_pose.pose.position.y =0.04373
target_pose.pose.position.z =0.12941
target_pose.pose.orientation.x =0.8753672
target_pose.pose.orientation.y =0.22988
target_pose.pose.orientation.z =0.27960
target_pose.pose.orientation.w =0.32048
'''
rospy.loginfo("8888888888888888888"+ str(target_pose))
#Set the start state to the current state
right_arm.set_start_state_to_current_state()
# Set the goal pose of the end effector to the stored pose
right_arm.set_pose_target(target_pose, end_effector_link)
## Plan the trajectory to the goal
traj1 = right_arm.plan()
## Execute the planned trajectory
right_arm.execute(traj1)
#rospy.loginfo("11111111111111111111111111"+ str(traj1))
rospy.loginfo("111111 ik_executed successed 1111111")
## Pause for a second
rospy.sleep(1)
# Get the end-effector pose
ee_pose_current = right_arm.get_current_pose(end_effector_link)
# Display the end-effector pose
rospy.loginfo("current ee_pose:\n" + str(ee_pose_current))
# Shift the end-effector to the right 5cm
right_arm.shift_pose_target(2, 0.05, end_effector_link)
####right_arm.go()
traj2 = right_arm.plan()
#rospy.loginfo("22222222222222222222222222 "+ str(traj2))
rospy.loginfo("222222 up 22222222")
right_arm.execute(traj2)
rospy.sleep(1)
# Rotate the end-effector 90 degrees
right_arm.shift_pose_target(5, 0.1, end_effector_link)
#######right_arm.go()
traj3 = right_arm.plan()
#rospy.loginfo("333333333333333333333333333 "+ str(traj3))
rospy.loginfo("333333 roll 3333333333 ")
right_arm.execute(traj3)
rospy.sleep(1)
# Store this pose as the new target_pose
saved_target_pose = right_arm.get_current_pose(end_effector_link)
# Move to the named pose "wave"
right_arm.set_named_target('wave')
#########right_arm.go()
traj4 = right_arm.plan()
#rospy.loginfo("4444444444444444444444444444444"+ str(traj4))
rospy.loginfo("44444444 wave 444444444")
right_arm.execute(traj4)
rospy.sleep(1)
# Go back to the stored target
right_arm.set_pose_target(saved_target_pose, end_effector_link)
#########right_arm.go()
traj5 = right_arm.plan()
#rospy.loginfo("55555555555555555555555555"+ str(traj5))
rospy.loginfo("5555555 saved_pose 55555555")
right_arm.execute(traj5)
rospy.sleep(1)
# Finish up in the resting position
right_arm.set_named_target('resting')
#########right_arm.go()
traj6 = right_arm.plan()
#rospy.loginfo("666666666666666666666666666"+ str(traj6))
rospy.loginfo("6666666 resting 66666666")
right_arm.execute(traj6)
# Shut down MoveIt cleanly
moveit_commander.roscpp_shutdown()
# Exit MoveIt
moveit_commander.os._exit(0)
if __name__ == "__main__":
MoveItDemo()
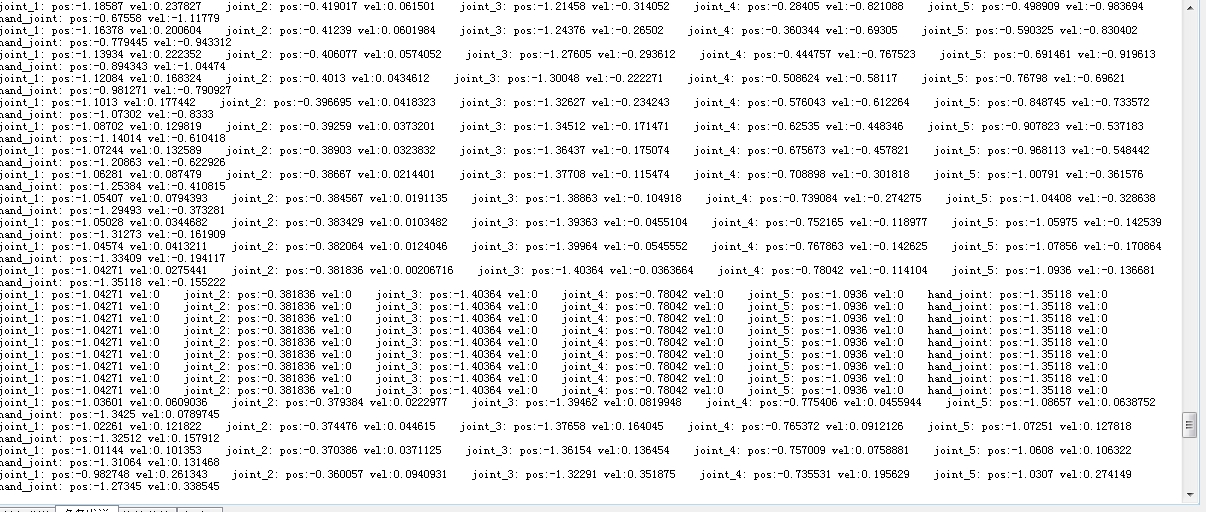
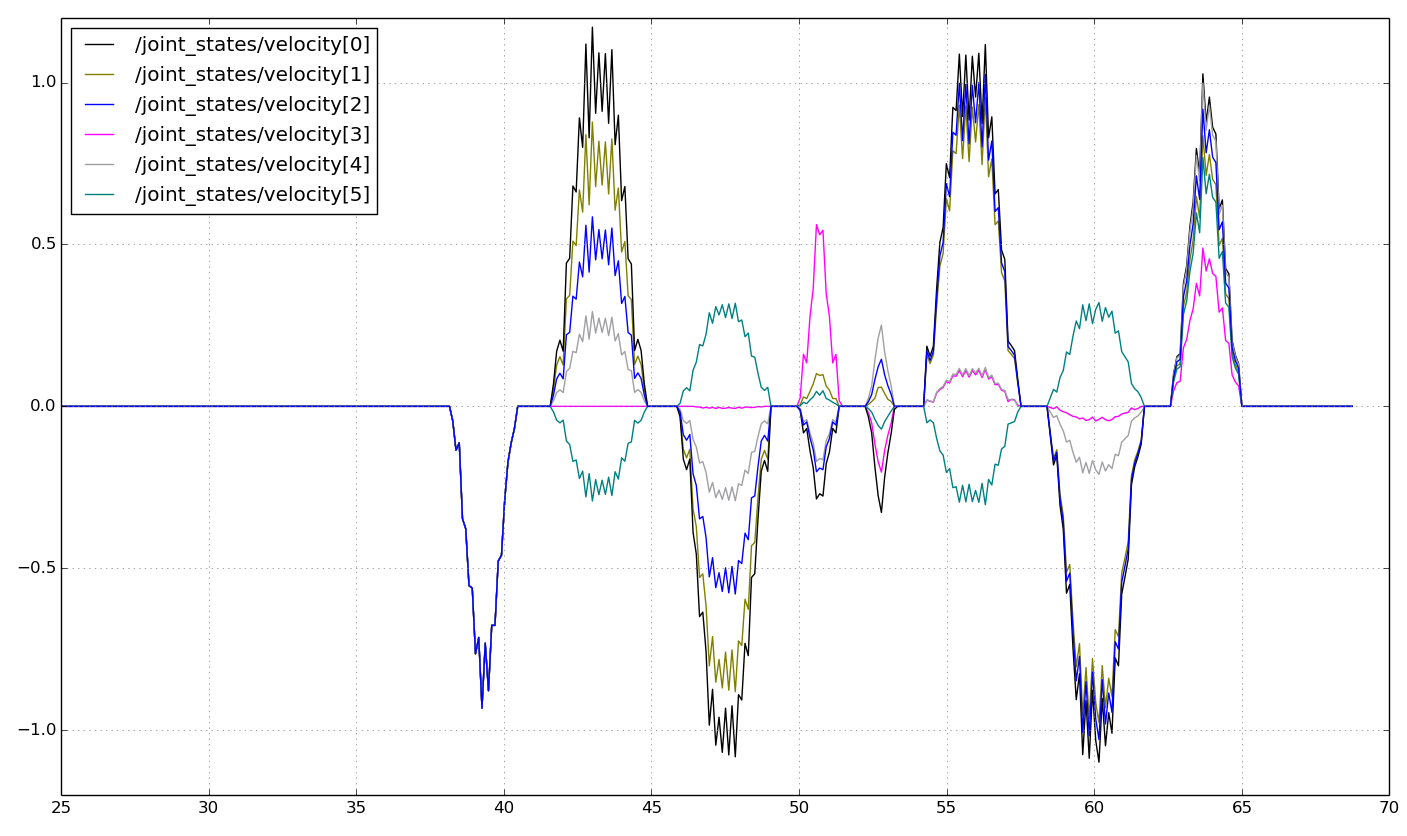
六、也观察joint_states话题中包含的position和velocity信息
xs@xs-PC:~$ rosrun rqt_plot rqt_plot
七、也成功地向串口助手发送数据