第一步添加ROS软件源:
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
上面的源是官网提供的,但安装没有成功。使用的是清华大学的源,如下:
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'
第二步添加密钥:
sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116
第三步安装ROS:
sudo apt-get update
sudo apt-get install ros-kinetic-desktop-full
第四步初始化rosdep:
sudo rosdep init
rosdep update
第五步设置环境变量:
echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
第六步安装一些必备的工具包:
sudo apt-get install python-rosinstall python-rosinstall-generator python-wstool build-essential
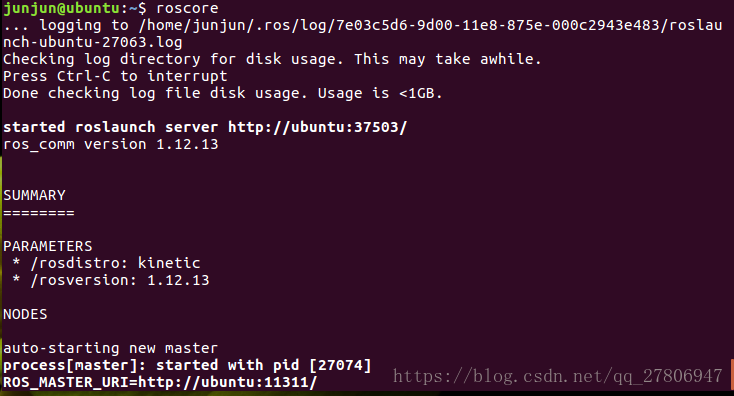
安装完成:测试
roscore
结果如下图所示: