版权声明:本文为博主原创文章,能帮到你很开心(^_^)~,欢迎转载,转载请注明出处~ https://blog.csdn.net/qq_36396104/article/details/79860189
上一篇:图像处理入门(一):linux(ubuntu)配置Openface+测试
一、需要了解的基础知识:
(1)使用Opencv对图片进行读写和显示操作:
1、使用cv2.cv的LoadImage、ShowImage和SaveImage函数:
import cv2.cv as cv
# 读图片
image=cv.LoadImage('img/image.png', cv.CV_LOAD_IMAGE_COLOR)#Load the image
#Or just: image=cv.LoadImage('img/image.png')
cv.NamedWindow('a_window', cv.CV_WINDOW_AUTOSIZE) #Facultative
cv.ShowImage('a_window', image) #Show the image
# 写图片
cv.SaveImage("thumb.png", thumb)
cv.WaitKey(0) #Wait for user input and quit2、也可以直接使用cv2的imread、imwrite和imshow函数
import numpy as np
import cv2
img = cv2.imread('messi5.jpg',0)
cv2.imshow('image',img)
k = cv2.waitKey(0)
if k == 27: # wait for ESC key to exit
cv2.destroyAllWindows()
elif k == ord('s'): # wait for 's' key to save and exit
cv2.imwrite('messigray.png',img)
cv2.destroyAllWindows()
imread函数还可以定义加载的mode,默认是以RGB模式处理图片:
import cv2
grayImage = cv2.imread('MyPic.png', cv2.CV_LOAD_IMAGE_GRAYSCALE)
# 可选参数CV_LOAD_IMAGE_COLOR (BGR), CV_LOAD_IMAGE_GRAYSCALE (grayscale), CV_LOAD_IMAGE_UNCHANGED(neither)
cv2.imwrite('MyPicGray.png', grayImage)(2)图像仿射:(引用:https://blog.csdn.net/on2way/article/details/46801063)
图像的旋转加上拉升就是图像仿射变换,仿射变化也是需要一个M矩阵就可以,但是由于仿射变换比较复杂,一般直接找很难找到这个矩阵,opencv提供了根据变换前后三个点的对应关系来自动求解M。这个函数是
M=cv2.getAffineTransform(pos1,pos2),其中两个位置就是变换前后的对应位置关系。输 出的就是仿射矩阵M。然后在使用函数cv2.warpAffine()。形象化的图如下(引用参考的)
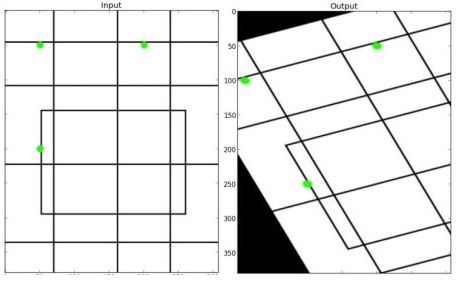
一个例子比如:
import cv2
import numpy as np
import matplotlib.pyplot as plt
img = cv2.imread('flower.jpg')
pts1 = np.float32([[50,50],[200,50],[50,200]])
rows,cols = img.shape[:2]
M = cv2.getAffineTransform(pts1,pts2)
pts2 = np.float32([[10,100],[200,50],[100,250]])
#第三个参数:变换后的图像大小
plt.subplot(122)
res = cv2.warpAffine(img,M,(rows,cols))
plt.subplot(121) plt.imshow(img)
plt.imshow(res)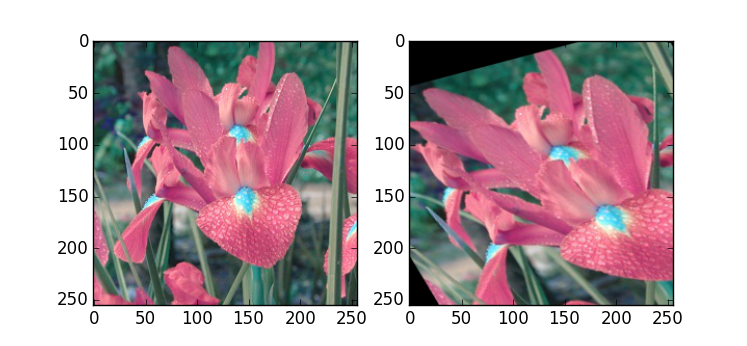
二、人脸检测和处理:
(一)、识别最大的人脸边界框:
扫描二维码关注公众号,回复:
3320139 查看本文章

(1)、使用人脸检测器:dlib自带的frontal_face_detector特征提取器:
使用方法:
detector=dlib.get_frontal_face_detector()
faces = detector(Img, 1)
或者:
dets = dlib.get_frontal_face_detector(img)【dlib代码解读】人脸检测器的训练【转】
(二)、人脸对齐:
(1)、利用dlib的特征预测器(和dlib的shape_predictor_68_face_landmarks.dat(68点特征预测器)),进行人脸 68点特征提取:
使用方法:
predictor = dlib.shape_predictor("../models/dlib/shape_predictor_68_face_landmarks.dat")#此处填的是路径
shape = predictor(img, dets[0])三、代码和效果:
import dlib
import cv2
def GetFace(imgpath='1.jpg'):
#读取图片
Img=cv2.imread(imgpath)
if Img is None:
raise Exception("Unable to load image: {}".format(imgpath))
# cv2.imshow('face image',Img);
# cv2.waitKey()
detector = dlib.get_frontal_face_detector()
facebox = detector(Img, 1)
face=facebox[0]#注意facebox是一个array
predictor = dlib.shape_predictor("/home/angelo/openface/demos/../models/dlib/shape_predictor_68_face_landmarks.dat") # 此处填的是路径
shape = predictor(Img, face)
# 生成dlib的图像窗口
win = dlib.image_window()
win.clear_overlay()
win.set_image(Img)
# 绘制面部轮廓
win.add_overlay(shape)
# 绘制矩阵轮廓
win.add_overlay(facebox)
# 保持图像
dlib.hit_enter_to_continue()
if __name__=="__main__":
GetFace('1.jpg')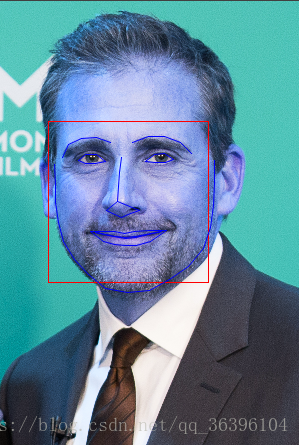
图像的仿射:
def GetFace(imgpath='1.jpg'):
#读取图片
Img=cv2.imread(imgpath)
if Img is None:
raise Exception("Unable to load image: {}".format(imgpath))
# cv2.imshow('face image',Img);
# cv2.waitKey()
detector = dlib.get_frontal_face_detector()
facebox = detector(Img, 1)
face=facebox[0]#注意facebox是一个array
predictor = dlib.shape_predictor("/home/angelo/openface/demos/../models/dlib/shape_predictor_68_face_landmarks.dat") # 此处填的是路径
shape = predictor(Img, face)
# 生成dlib的图像窗口
win = dlib.image_window()
win.clear_overlay()
win.set_image(Img)
# 绘制面部轮廓
win.add_overlay(shape)
# 绘制矩阵轮廓
win.add_overlay(facebox)
# 保持图像
# dlib.hit_enter_to_continue()
#图像仿射
landmarkIndices = [39, 42, 57]
npLandmarks = np.float32(list(map(lambda p: (p.x, p.y), shape.parts())))
npLandmarkIndices = np.array(landmarkIndices)
TEMPLATE = np.float32([
(0.0792396913815, 0.339223741112), (0.0829219487236, 0.456955367943),
(0.0967927109165, 0.575648016728), (0.122141515615, 0.691921601066),
(0.168687863544, 0.800341263616), (0.239789390707, 0.895732504778),
(0.325662452515, 0.977068762493), (0.422318282013, 1.04329000149),
(0.531777802068, 1.06080371126), (0.641296298053, 1.03981924107),
(0.738105872266, 0.972268833998), (0.824444363295, 0.889624082279),
(0.894792677532, 0.792494155836), (0.939395486253, 0.681546643421),
(0.96111933829, 0.562238253072), (0.970579841181, 0.441758925744),
(0.971193274221, 0.322118743967), (0.163846223133, 0.249151738053),
(0.21780354657, 0.204255863861), (0.291299351124, 0.192367318323),
(0.367460241458, 0.203582210627), (0.4392945113, 0.233135599851),
(0.586445962425, 0.228141644834), (0.660152671635, 0.195923841854),
(0.737466449096, 0.182360984545), (0.813236546239, 0.192828009114),
(0.8707571886, 0.235293377042), (0.51534533827, 0.31863546193),
(0.516221448289, 0.396200446263), (0.517118861835, 0.473797687758),
(0.51816430343, 0.553157797772), (0.433701156035, 0.604054457668),
(0.475501237769, 0.62076344024), (0.520712933176, 0.634268222208),
(0.565874114041, 0.618796581487), (0.607054002672, 0.60157671656),
(0.252418718401, 0.331052263829), (0.298663015648, 0.302646354002),
(0.355749724218, 0.303020650651), (0.403718978315, 0.33867711083),
(0.352507175597, 0.349987615384), (0.296791759886, 0.350478978225),
(0.631326076346, 0.334136672344), (0.679073381078, 0.29645404267),
(0.73597236153, 0.294721285802), (0.782865376271, 0.321305281656),
(0.740312274764, 0.341849376713), (0.68499850091, 0.343734332172),
(0.353167761422, 0.746189164237), (0.414587777921, 0.719053835073),
(0.477677654595, 0.706835892494), (0.522732900812, 0.717092275768),
(0.569832064287, 0.705414478982), (0.635195811927, 0.71565572516),
(0.69951672331, 0.739419187253), (0.639447159575, 0.805236879972),
(0.576410514055, 0.835436670169), (0.525398405766, 0.841706377792),
(0.47641545769, 0.837505914975), (0.41379548902, 0.810045601727),
(0.380084785646, 0.749979603086), (0.477955996282, 0.74513234612),
(0.523389793327, 0.748924302636), (0.571057789237, 0.74332894691),
(0.672409137852, 0.744177032192), (0.572539621444, 0.776609286626),
(0.5240106503, 0.783370783245), (0.477561227414, 0.778476346951)])
TPL_MIN, TPL_MAX = np.min(TEMPLATE, axis=0), np.max(TEMPLATE, axis=0)
MINMAX_TEMPLATE = (TEMPLATE - TPL_MIN) / (TPL_MAX - TPL_MIN)
H = cv2.getAffineTransform(npLandmarks[npLandmarkIndices],
96 * MINMAX_TEMPLATE[npLandmarkIndices]) # 其中两个位置就是变换前后的对应位置关系。输 出的就是仿射矩阵M
thumbnail = cv2.warpAffine(Img, H, (96, 96)) # 仿射函数cv2.warpAffine()接受三个参数,需要变换的原始图像,移动矩阵M
# 以及变换的图像大小(这个大小如果不和原始图像大小相同,那么函数会自 动通过插值来调整像素间的关系)
cv2.imshow('image', thumbnail);
cv2.waitKey();