RM装甲算法流程
- 图像处理与目标检测
- 装甲
- 神符
- 坐标空间转换,如何将目标的像素坐标->图像坐标->云台坐标->云台偏转角度
- 数据通信
目录
1. 数据结构
装甲检测类ArmorDetector
//主要成员变量
bool _is_lost;
int _lost_cnt;
bool _is_small_armor; // true if armor is the small one, otherwise false
cv::RotatedRect _res_last; //上次检测到的装甲的旋转矩形
cv::Rect _dect_rect; // detect roi of original image
ArmorParam _para; // parameter of alg
cv::Mat _binary_template; // 装甲模板的二值图像
cv::Mat _binary_template_small; // 小的装甲模板的二值图像
cv::Mat _src; // 原图像
cv::Mat _g; // 绿色通道图像
cv::Mat _ec; // 目标颜色通道的图像
cv::Mat _max_color; // 阈值化处理的二值图像
cv::Size _size;
//主要成员函数
void initTemplate(const cv::Mat & _template, const cv::Mat & _template_small);
cv::RotatedRect getTargetAera(const cv::Mat & src);
void findContourInEnemyColor(
cv::Mat & left, cv::Mat & right,
std::vector<std::vector<cv::Point2i> > &contours_left,
std::vector<std::vector<cv::Point2i> > &contours_right);
void findTargetInContours(
const std::vector<std::vector<cv::Point> > & contours_left,
const std::vector<std::vector<cv::Point> > & contours_right,
std::vector<cv::RotatedRect> & rects,
std::vector<double> & score);
void setImage(const cv::Mat & src);
cv::RotatedRect chooseTarget(const std::vector<cv::RotatedRect> & rects, const std::vector<double> & score);
int templateDist(const cv::Mat & img, bool is_small);
cv::RotatedRect boundingRRect(const cv::RotatedRect & left, const cv::RotatedRect & right);
cv::RotatedRect adjustRRect(const cv::RotatedRect & rect);
2. 函数调用过程
getTargetAera() -> setImage()
-> findContourInEnemyColor() -> findContours()
-> boundingRect()
-> findTargetInContours() -> minAreaRect()
-> adjustRRect()
-> boundingRRect()
-> chooseTarget()函数功能介绍:
cv::RotatedRect ArmorDetector::getTargetAera(const cv::Mat & src)检测装甲的核心函数,功能是从输入的一帧图像中检测装甲的位置,返回装甲所在位置的一个旋转矩形。
void ArmorDetector::setImage(const cv::Mat & src)对原图像进行通道分离,得到绿色通道图像,目标颜色通道图像,和二值化图像,复制给ArmorDetector的成员变量。
void ArmorDetector::findContourInEnemyColor( cv::Mat & left, cv::Mat & right,
vector<vector<Point2i> > &contours_left,
vector<vector<Point2i> > &contours_right
)该函数比较特别,四个参数均是输出参数,即函数执行的结果直接修改四个引用参数,不返回任何值。功能是,在二值图像中提取轮廓,并用外界矩形定位,然后在该矩形区域采用模板匹配,在left、right标记出左右灯柱的位置,在left和right上分别提取轮廓得到contours_left和contours_right。该函数比较繁琐。
void cv::findContours( InputOutputArray image,
OutputArrayOfArrays contours,
OutputArray hierarchy,
int mode,
int method,
Point offset = Point()
)OpenCV提取轮廓的函数。
Rect cv::boundingRect ( InputArray points ) OpenCV函数。对输入的点集求一个直立且外接的矩形。
void ArmorDetector::findTargetInContours(const vector<vector<Point> > & contours_left,
const vector<vector<Point> > & contours_right, vector<RotatedRect> & rects,
std::vector<double> & score
) 在输入的可能的左右灯柱的轮廓中找到装甲的位置,并建立旋转矩形,添加到rects向量中。
RotatedRect cv::minAreaRect ( InputArray points )opencv函数。再输入的点集中拟合一个面积最小的旋转矩形
cv::RotatedRect adjustRRect(const cv::RotatedRect & rect);调整拟合上面函数拟合成的旋转矩形,保证height>width,且其角度为锐角。
cv::RotatedRect ArmorDetector::boundingRRect(const cv::RotatedRect & left,
const cv::RotatedRect & right)根据左右灯柱的旋转矩形计算并返回装甲的旋转矩形。
cv::RotatedRect ArmorDetector::chooseTarget(const std::vector<cv::RotatedRect> & rects,
const std::vector<double> & score
) 在候选的装甲所在的旋转矩形中选择最有可能的一个。
3. 检测算法
可以分为以下几个部分:
- 二值化(setImage)
- 利用模板在二值化图像中检测灯柱(findContourInEnemyColor)
- 拟合灯柱为旋转矩形(findTargetInContours)
- 在灯柱旋转矩形中定位装甲,并包装成旋转矩形(findTargetInContours)
- 在候选装甲的旋转矩形中选择最佳(chooseTarget)
注:括号内为程序中相关的函数。
下面详细介绍每一部分的算法流程
3.1 二值化
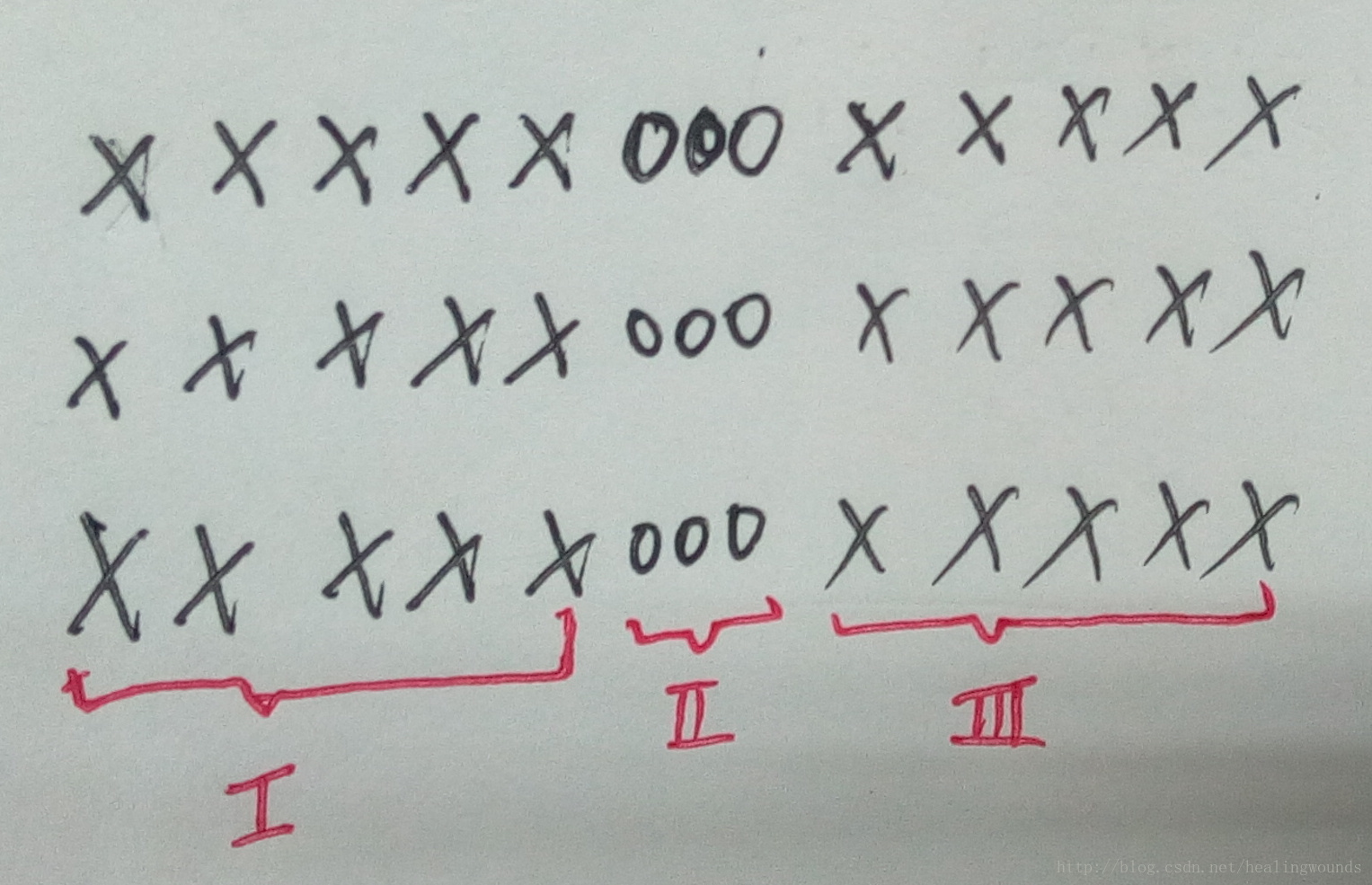
3.2 利用模板检测灯柱
模板匹配的过程:
让下面图像的中心遍历矩形内的每个像素,然后分别计算I区覆盖的灰度之和
3.3 定位装甲
判断准则:
左右灯柱偏离垂直方向的角度的绝对值不超过阈值
左右灯柱角度差绝对值不超过阈值
- 左右灯柱中心点距离介于一定范围内
- 左右灯柱中心点的高度差不超过阈值
注意:程序在判断过程中根据判断准则对候选的装甲旋转矩形打分,以便于在后面的程序中选择最佳的旋转矩形作为攻击目标。
3.4 选择最终的攻击目标
- 若存在上一次的检测目标,则当前目标与上一次目标的宽度差不能超过50%
- 若接收云台pitch轴角度数据,则目标区域解算出来的高度不能高于/低于云台一定范围
- 灯柱周围区域的目标通道灰度均值需大于其他通道的灰度均值
- 黑色装甲中间区域绿色通道的梯度值较大的比例 r1 , r1 必须小于一定阈值
- 目标二值图像与目标模板二值图像进行距离计算,距离比例 r2 等于与模板的汉明距离除以目标像素个数, r2 必须小于一定阈值
- 若仍然存在多个候选目标区域,则选择权重最小的区域作为目标区域
4. 部分源码
//装甲检测函数
cv::RotatedRect ArmorDetector::getTargetAera(const cv::Mat & src)
{
setImage(src);
cv::Mat contrast_left, contrast_right;
vector<vector<Point2i> > contours_left;
vector<vector<Point2i> > contours_right;
findContourInEnemyColor(contrast_left, contrast_right, contours_left, contours_right);
vector<RotatedRect> rects;
vector<double> score;
findTargetInContours(contours_left, contours_right, rects, score);
RotatedRect final_rect = chooseTarget(rects, score);
#ifdef SHOW_DEBUG_IMG
Mat rect_show;
_src.copyTo(rect_show);
for (size_t i = 0; i < rects.size(); i++) {
Scalar color(rand() & 255, rand() & 255, rand() & 255);
Point2f vertices[4];
rects[i].points(vertices);
for (int i = 0; i < 4; i++)
line(rect_show, vertices[i], vertices[(i + 1) % 4], color);
}
Point2f vertices[4];
final_rect.points(vertices);
for (int i = 0; i < 4; i++)
line(rect_show, vertices[i], vertices[(i + 1) % 4], CV_RGB(255, 0, 0));
imshow("5.rect", rect_show);
#endif
if(final_rect.size.width != 0){
final_rect.center.x += _dect_rect.x;
final_rect.center.y += _dect_rect.y;
_res_last = final_rect;
_lost_cnt = 0;
}
else{
++_lost_cnt;
if (_lost_cnt < 3)
_res_last.size =Size2f(_res_last.size.width * 2, _res_last.size.height * 1.5);
else if(_lost_cnt == 6)
_res_last.size =Size2f(_res_last.size.width * 1.5, _res_last.size.height * 1.5);
else if(_lost_cnt == 12)
_res_last.size =Size2f(_res_last.size.width * 1.5, _res_last.size.height * 1.5);
else if(_lost_cnt == 18)
_res_last.size =Size2f(_res_last.size.width * 1.5, _res_last.size.height * 1.5);
else if (_lost_cnt > 60 )
_res_last = RotatedRect();
}
return final_rect;
}void ArmorDetector::setImage(const cv::Mat & src)
{
_size = src.size();
const cv::Point & last_result = _res_last.center;
if(last_result.x == 0 || last_result.y == 0){
_src = src;
_dect_rect = Rect(0, 0, src.cols, src.rows);
}
else{
Rect rect = _res_last.boundingRect();
int max_half_w = _para.max_light_delta_h * 1.3;
int max_half_h = 300;
double scale = src.rows == 480 ? 1.8 : 2.5;
int exp_half_w = min(max_half_w / 2, int(rect.width * scale));
int exp_half_h = min(max_half_h / 2, int(rect.height * scale));
int w = std::min(max_half_w, exp_half_w);
int h = std::min(max_half_h, exp_half_h);
Point center = last_result;
int x = std::max(center.x - w, 0);
int y = std::max(center.y - h, 0);
Point lu = Point(x, y);
x = std::min(center.x + w, src.cols);
y = std::min(center.y + h, src.rows);
Point rd = Point(x, y);
_dect_rect = Rect(lu, rd);
if (makeRectSafe(_dect_rect, src.size()) == false){
_res_last = cv::RotatedRect();
_dect_rect = Rect(0, 0, src.cols, src.rows);
_src = src;
}
else
src(_dect_rect).copyTo(_src);
}
int total_pixel = _src.cols * _src.rows;
const uchar * ptr_src = _src.data;
const uchar * ptr_src_end = _src.data + total_pixel * 3;
_g.create(_src.size(), CV_8UC1);
_ec.create(_src.size(), CV_8UC1);
_max_color = cv::Mat(_src.size(), CV_8UC1, cv::Scalar(0));
uchar *ptr_g = _g.data, *ptr_ec = _ec.data, *ptr_max_color = _max_color.data;
if (_para.enemy_color == RED){
for (; ptr_src != ptr_src_end; ++ptr_src, ++ptr_g, ++ptr_max_color, ++ptr_ec) {
uchar b = *ptr_src;
uchar g = *(++ptr_src);
uchar r = *(++ptr_src);
*ptr_g = g;
*ptr_ec = r;
//*ptr_g = b;
if (r > _para.min_light_gray)
*ptr_max_color = 255;
}
}
else {
for (; ptr_src != ptr_src_end; ++ptr_src, ++ptr_g, ++ptr_max_color, ++ptr_ec) {
uchar b = *ptr_src;
uchar g = *(++ptr_src);
uchar r = *(++ptr_src);
*ptr_g = g;
*ptr_ec = b;
//*ptr_g = r;
if (b > _para.min_light_gray)
*ptr_max_color = 255;
}
}
#ifdef SHOW_DEBUG_IMG
cv::imshow("g", _g);
cv::imshow("_max_color", _max_color);
#endif
}void ArmorDetector::findContourInEnemyColor(
cv::Mat & left, cv::Mat & right,
vector<vector<Point2i> > &contours_left,
vector<vector<Point2i> > &contours_right)
{
// find contour in sub image of blue and red
vector<vector<Point2i> > contours_br;
vector<Vec4i> hierarchy;
findContours(_max_color, contours_br, hierarchy, CV_RETR_EXTERNAL , CV_CHAIN_APPROX_SIMPLE);
vector<vector<Point2i> >::const_iterator it = contours_br.begin();
left = Mat::zeros(_max_color.size(), CV_8UC1);
right = Mat::zeros(_max_color.size(), CV_8UC1);
const int margin_l = 1, margin_r = 10;
const int margin_h = 3;
while (it != contours_br.end()){
Rect rect = cv::boundingRect(*it);
if (rect.height < _para.min_light_height){
++it;
continue;
}
int max_i = rect.x + rect.width;
max_i = std::min(_max_color.cols, max_i + margin_r);
int half_j = (margin_h >> 1), max_j = rect.y + rect.height, min_j = rect.y;
max_j = std::min(_max_color.rows - 1, max_j + half_j);
min_j = std::max(min_j, half_j);
int count_left = 0, count_right = 0;
const uchar * ptr_gray_base = _g.data;
for (size_t j = min_j; j < max_j; ++j) {
const uchar * ptr_gray = ptr_gray_base + j * _g.cols;
for (size_t i = rect.x; i < max_i; ++i) {
if (*(ptr_gray + i) < _para.min_light_gray)
continue;
float block0 = 0, block1 = 0, block_1 = 0;
// do margin protection
if (i >= margin_r){
for (int m = -half_j; m <= half_j; ++m) {
const uchar * ptr = ptr_gray + m * _g.cols + i;
// for common 'o' of template
for (int k = 0; k < margin_l; k++)
block0 += *(ptr + k);
// for 'x' of left template
for (int k = margin_l; k < margin_r; k++)
block1 += *(ptr + k);
// for 'x' of right template
for (int k = -margin_l; k > -margin_r; --k)
block_1 += *(ptr + k);
}
block0 /= margin_h * margin_l;
block1 /= margin_h * (margin_r - margin_l);
block_1 /= margin_h * (margin_r - margin_l);
int avgdist = block0 - block1;
left.at<uchar>(j, i) = avgdist > _para.avg_contrast_threshold ? (++count_left, 255) : 0;
avgdist = block0 - block_1;
right.at<uchar>(j, i) = avgdist > _para.avg_contrast_threshold ? (++count_right, 255) : 0;
}
else {
for (int m = -half_j; m <= half_j; ++m) {
const uchar * ptr = ptr_gray + m * _g.cols + i;
// for 'o' of left template
for (int k = 0; k < margin_l; k++)
block0 += *(ptr + k);
// for 'x' of left template
for (int k = margin_l; k < margin_r; k++)
block1 += *(ptr + k);;
}
block0 /= margin_h * margin_l;
block1 /= margin_h * (margin_r - margin_l);
int avgdist = block0 - block1;
left.at<uchar>(j, i) = avgdist > _para.avg_contrast_threshold ? (++count_left, 255) : 0;
}
}
}
if (count_left > 10){
vector<vector<Point2i> > contour;
vector<Vec4i> hierarchy;
findContours(left(rect), contour, hierarchy, CV_RETR_LIST, CV_CHAIN_APPROX_SIMPLE, cv::Point2i(rect.x, rect.y));
contours_left.insert(contours_left.end(), contour.begin(), contour.end());
}
if (count_right > 10){
vector<vector<Point2i> > contour;
vector<Vec4i> hierarchy;
findContours(right(rect), contour, hierarchy, CV_RETR_LIST, CV_CHAIN_APPROX_SIMPLE, cv::Point2i(rect.x, rect.y));
contours_right.insert(contours_right.end(), contour.begin(), contour.end());
}
++it;
}
}void ArmorDetector::findTargetInContours(const vector<vector<Point> > & contours_left, const vector<vector<Point> > & contours_right, vector<RotatedRect> & rects, std::vector<double> & score)
{
// 用直线拟合轮廓,找出符合斜率范围的轮廓
vector<RotatedRect> final_contour_rect_left, final_contour_rect_right;
vector<double> score_left, score_right;
#ifdef SHOW_DEBUG_IMG
Mat contours_show_left, contours_show_right;
_src.copyTo(contours_show_left);
_src.copyTo(contours_show_right);
#endif
for (size_t i = 0; i < contours_left.size(); ++i){
// fit the lamp contour as a eclipse
RotatedRect rrect = minAreaRect(contours_left[i]);
rrect = adjustRRect(rrect);
double angle = rrect.angle;
angle = 90 - angle;
angle = angle < 0 ? angle + 180 : angle;
#ifdef SHOW_DEBUG_IMG
//cout << "(angle)\t(" << angle << ")\n";
Scalar color(rand() & 255, rand() & 255, rand() & 255);
char slope_str[15];
sprintf(slope_str, "%.1f", angle);
putText(contours_show_left, slope_str, contours_left[i][0], CV_FONT_HERSHEY_COMPLEX_SMALL, 0.5, color, 1);
drawContours(contours_show_left, contours_left, i, color, CV_FILLED, 8);
#endif
// the contour must be near-vertical
float delta_angle = abs(angle - 90);
if (delta_angle < _para.light_slope_offset)
{
final_contour_rect_left.push_back(rrect);
score_left.push_back(delta_angle);
}
}
for (size_t i = 0; i < contours_right.size(); ++i){
// fit the lamp contour as a eclipse
RotatedRect rrect = minAreaRect(contours_right[i]);
rrect = adjustRRect(rrect);
double angle = rrect.angle;
angle = 90 - angle;
angle = angle < 0 ? angle + 180 : angle;
#ifdef SHOW_DEBUG_IMG
//cout << "(angle)\t(" << angle << ")\n";
Scalar color(rand() & 255, rand() & 255, rand() & 255);
char slope_str[15];
sprintf(slope_str, "%.1f", angle);
putText(contours_show_right, slope_str, contours_right[i][0], CV_FONT_HERSHEY_COMPLEX_SMALL, 0.5, color, 1);
drawContours(contours_show_right, contours_right, i, color, CV_FILLED, 8);
#endif
// the contour must be near-vertical
float delta_angle = abs(angle - 90);
if (delta_angle < _para.light_slope_offset){
final_contour_rect_right.push_back(rrect);
score_right.push_back(delta_angle);
}
}
// using all the left edge and right edge to make up rectangles
for (size_t i = 0; i < final_contour_rect_left.size(); ++i) {
const RotatedRect & rect_i = final_contour_rect_left[i];
const Point & center_i = rect_i.center;
float xi = center_i.x;
float yi = center_i.y;
for (size_t j = 0; j < final_contour_rect_right.size(); j++) {
const RotatedRect & rect_j = final_contour_rect_right[j];
const Point & center_j = rect_j.center;
float xj = center_j.x;
float yj = center_j.y;
float delta_h = xj - xi;
float delta_angle = abs(rect_j.angle - rect_i.angle);
// if rectangle is match condition, put it in candidate vector
if (delta_h > _para.min_light_delta_h && delta_h < _para.max_light_delta_h &&
abs(yi - yj) < _para.max_light_delta_v &&
delta_angle < _para.max_light_delta_angle) {
RotatedRect rect = boundingRRect(rect_i, rect_j);
rects.push_back(rect);
score.push_back((score_right[j] + score_left[i]) / 6.0 + delta_angle);
}
}
}
#ifdef SHOW_DEBUG_IMG
imshow("4.contours_l", contours_show_left);
imshow("4.contours_r", contours_show_right);
#endif
}RotatedRect ArmorDetector::adjustRRect(const RotatedRect & rect)
{
const Size2f & s = rect.size;
if (s.width < s.height)
return rect;
return RotatedRect(rect.center, Size2f(s.height, s.width), rect.angle + 90.0);
}cv::RotatedRect ArmorDetector::boundingRRect(const cv::RotatedRect & left, const cv::RotatedRect & right)
{
const Point & pl = left.center, & pr = right.center;
Point2f center = (pl + pr) / 2.0;
cv::Size2f wh_l = left.size;
cv::Size2f wh_r = right.size;
float width = POINT_DIST(pl, pr) - (wh_l.width + wh_r.width) / 2.0;
float height = std::max(wh_l.height, wh_r.height);
//float height = (wh_l.height + wh_r.height) / 2.0;
float angle = std::atan2(right.center.y - left.center.y, right.center.x - left.center.x);
return RotatedRect(center, Size2f(width, height), angle * 180 / CV_PI);
}cv::RotatedRect ArmorDetector::chooseTarget(const std::vector<cv::RotatedRect> & rects, const std::vector<double> & score)
{
if (rects.size() < 1){
_is_lost = true;
return RotatedRect();
}
int ret_idx = -1;
double avg_score = 0.0;
for(int i = 0; i < score.size(); ++i){
avg_score += score[i];
}
avg_score /= score.size();
const double small_armor_wh_threshold = 3.6;
const double avg_slope = 4.0;
const double exp_weight_scale = 15.0;
const double degree2rad_scale = 3.1415926 / 180.0;
double percent_large_grad_threshold = 0.25;
double template_dist_threshold = 0.20;
double max_wh_ratio = 5.2, min_wh_ratio = 1.25;
if( _is_lost == false){
template_dist_threshold = 0.4;
percent_large_grad_threshold = 0.5;
max_wh_ratio += 0.5;
min_wh_ratio -= 0.2;
}
double weight = template_dist_threshold * percent_large_grad_threshold / exp(-(avg_slope + avg_score) * degree2rad_scale * exp_weight_scale);
bool is_small = false;
#define SafeRect(rect, max_size) {if (makeRectSafe(rect, max_size) == false) continue;}
for (size_t i = 0; i < rects.size(); ++i){
const RotatedRect & rect = rects[i];
// the ratio of width and height must be matched
double w = rect.size.width;
double h = rect.size.height;
double wh_ratio = w / h;
if (wh_ratio > max_wh_ratio || wh_ratio < min_wh_ratio)
continue;
AngleSolver * slover = NULL;
if(_size.height == 480)
slover = s_solver;
else if(_size.height == 720)
slover = l_solver;
if (wh_ratio < small_armor_wh_threshold)
is_small = true;
else
is_small = false;
if (slover != NULL && _is_lost){
is_small == true ? slover->setTargetSize(12.4, 5.4) : slover->setTargetSize(21.6, 5.4);
double angle_y = 0.0, angle_x = 0.0;
if (false == slover->getAngle(rect, angle_x, angle_y, 0., 0., cv::Point(_dect_rect.x, _dect_rect.y)))
continue;
Mat xyz_in_ptz = slover->position_in_ptz;
double d = sqrt(xyz_in_ptz.at<double>(1) * xyz_in_ptz.at<double>(1) + xyz_in_ptz.at<double>(2) * xyz_in_ptz.at<double>(2));
double t_offset = sin((pitch_angle - angle_y) * 3.1415926 / 180.0) * d;
if(t_offset < -40.0 || t_offset > 35.0){
#ifdef COUT_LOG
cout << "refused : target out of range: " <<
"\n\tcurrent ptz angle: " << pitch_angle <<
"\n\tcurrent target position: " << xyz_in_ptz.t() <<
"\n\tcurrent target offet set: " << t_offset << "\n";
#endif
continue;
}
if(t_offset > 5.0)
is_small = false;
else
is_small = true;
}
// width must close to the last result
const Size2f size_last = _res_last.size;
if(_is_lost == false && size_last.width > _para.min_light_delta_h){
double percent = 0.50 * size_last.width;
if (abs(w - size_last.width) > percent){
#ifdef COUT_LOG
cout << "refused 0 : size_last.width: " << size_last.width << "\tcur width: " << w << endl;
#endif
continue;
}
}
// rotate the area
int lamp_width = max((int)w / (is_small ? 12 : 20), 1);
cv::Rect bounding_roi = rect.boundingRect();
bounding_roi.x -= w / 8;
bounding_roi.width += w / 4;
SafeRect(bounding_roi, _src.size());
Point2f new_center = rect.center - Point2f(bounding_roi.x, bounding_roi.y);
Mat roi_src = _src(bounding_roi);
Mat rotation = getRotationMatrix2D(new_center, rect.angle, 1);
Mat rectify_target;
cv::warpAffine(roi_src, rectify_target, rotation, bounding_roi.size());
// get the black board of the armor
cv::Point ul = Point(std::max(int(new_center.x - (w / 2.0)) + 1, 0), std::max((int)(new_center.y - h / 2.0), 0));
cv::Point dr = Point(new_center.x + w / 2.0, new_center.y + h / 2.0);
Rect roi_black = Rect(cv::Point(ul.x, ul.y), cv::Point(dr.x, dr.y));
// get the left lamp and right lamp of the armor
Rect roi_left_lamp = Rect(Point(max(0, ul.x - lamp_width), ul.y), Point(max(rectify_target.cols, ul.x), dr.y));
Rect roi_right_lamp = Rect(Point(dr.x , ul.y), Point(min(dr.x + lamp_width, rectify_target.cols), dr.y));
SafeRect(roi_left_lamp, rectify_target.size());
SafeRect(roi_right_lamp, rectify_target.size());
SafeRect(roi_black, rectify_target.size());
// valid the gray value of black area
Mat black_part;
rectify_target(roi_black).copyTo(black_part);
int black_side = min(_para.min_light_delta_h / 2, 4);
Mat gray_mid_black(Size(roi_black.width - black_side * 2, roi_black.height), CV_8UC1);
const uchar * ptr = black_part.data;
uchar * ptr_gray = gray_mid_black.data;
int avg_green_mid = 0;
int avg_red_side = 0;
int avg_blue_side = 0;
int avg_green_side = 0;
int cf = black_part.cols - black_side;
for(int j = 0; j < black_part.rows; ++j){
for (int k = 0; k < black_side; ++k, ++ptr){
uchar b = *ptr;
uchar g = *(++ptr);
uchar r = *(++ptr);
avg_red_side += r;
avg_blue_side += b;
avg_green_side += g;
}
for (int k = black_side; k < cf; ++k, ++ptr, ++ptr_gray){
uchar b = *ptr;
uchar g = *(++ptr);
uchar r = *(++ptr);
avg_green_mid += g;
*ptr_gray = (uchar)((r * 38 + g * 75 + b * 15) >> 7);
}
for (int k = cf; k < black_part.cols; ++k, ++ptr){
uchar b = *ptr;
uchar g = *(++ptr);
uchar r = *(++ptr);
avg_red_side += r;
avg_blue_side += b;
avg_green_side += g;
}
}
avg_green_mid /= (gray_mid_black.cols * gray_mid_black.rows);
int side_total = black_side * 2 * gray_mid_black.rows;
avg_green_side /= side_total;
if (avg_green_mid > _para.avg_board_gray_threshold){
#ifdef COUT_LOG
cout << "refused 1 : avg_green: " << avg_green_mid << "\tavg_board_gray_threshold: " << (int)_para.avg_board_gray_threshold << endl;
#endif
continue;
}
if (_para.enemy_color == RED && avg_red_side - 10 < avg_blue_side){
#ifdef COUT_LOG
cout << "refused 1.1 : red < blue: red:" << avg_red_side/side_total << "\tblue: " << avg_blue_side/side_total << endl;
#endif
continue;
}
else if (_para.enemy_color == BLUE && avg_blue_side - 10 < avg_red_side){
#ifdef COUT_LOG
cout << "refused 1.2 : red > blue: red:" << avg_red_side/side_total << "\tblue: " << avg_blue_side/side_total << endl;
#endif
continue;
}
// valid the gradient of the black area
Mat gradX, gradY;
cv::Sobel(gray_mid_black, gradX, CV_16S, 1, 0);
cv::Sobel(gray_mid_black, gradY, CV_16S, 0, 1);
int y_grad = 0, x_grad = 0;
int large_grad_count = 0;
int side_width = gray_mid_black.cols * 10.0 / 100; // jump over the side;
short * ptr_x = (short *)gradX.data;
short * ptr_y = (short *)gradY.data;
for (size_t j = 0; j < gradX.rows; ++j){
// jump over left side part
ptr_x+= side_width;
ptr_y+= side_width;
// compute the middle part
int up_b = gradX.cols - side_width;
for (size_t k = side_width; k < up_b; ++k, ++ptr_x, ++ptr_y) {
int x = abs(*ptr_x);
int y = abs(*ptr_y);
x_grad += x;
y_grad += y;
large_grad_count += y / _para.grad_threshold;
}
// jump over right side part
ptr_x+= gradX.cols-up_b;
ptr_y+= gradX.cols-up_b;
}
// kick out the area of large gradients
int total_pixel = (gradX.cols - (side_width << 1)) * gradX.rows;
double large_grad_percent =(double)large_grad_count/total_pixel;
if(large_grad_percent > percent_large_grad_threshold){
#ifdef COUT_LOG
cout << "refused 2: large_grad_percent: " << large_grad_percent << endl;
#endif
continue;
}
// valid the average gradient of the black area
double avg_x = (double)x_grad / total_pixel;
double avg_y = (double)y_grad / total_pixel;
if (avg_x < _para.avg_board_grad_threshold + 30 && avg_y < _para.avg_board_grad_threshold ){
Point p1(roi_left_lamp.x, roi_left_lamp.y);
Point p2(roi_right_lamp.x+roi_right_lamp.width, roi_right_lamp.y+roi_right_lamp.height);
// get the whole area of armor
Rect armor_rect(p1, p2);
SafeRect(armor_rect, rectify_target.size());
Mat armor = rectify_target(armor_rect);
// compute the distance of template
cv::Size cur_size;
if (is_small)
cur_size = _binary_template_small.size();
else
cur_size = _binary_template.size();
resize(armor, armor, cur_size);
double dist = templateDist(armor, is_small);
dist = dist / (cur_size.width * cur_size.height);
if(dist > template_dist_threshold){
#ifdef COUT_LOG
cout << "refused 3: dist: " << dist << "\tdist threshold:" << (cur_size.width * cur_size.height) / 4 << endl;
#endif
continue;
}
// choose the best rectangle with minimum (large_grad_percent * dist)
dist = max(dist, 0.001);
large_grad_percent = max(large_grad_percent, 0.001);
double cur_weight = large_grad_percent * dist / exp(-(abs(rect.angle) + score[i]) * degree2rad_scale * exp_weight_scale);
if(cur_weight < weight){
weight = cur_weight;
ret_idx = i;
_is_small_armor = is_small;
//cout << "red:" << avg_red_side/side_total << "\tblue: " << avg_blue_side/side_total << endl;
//imwrite("armor_org.bmp", rectify_target(armor_rect));
}
#ifdef COUT_LOG
else
cout << "refused 4: cur_weight: " << cur_weight << "\tweight threshold:" << weight << endl;
#endif
}
#ifdef COUT_LOG
else
cout << "refused 3: (x_grad, y_grad): (" << avg_x << ", " << avg_y << ")\t avg_grad_threshold: " << (int)_para.avg_board_grad_threshold << endl;
#endif
}
//return ret_idx == -1 ? RotatedRect() : rects[ret_idx];
if (ret_idx == -1){
_is_lost = true;
return RotatedRect();
}
_is_lost = false;
// broaden the height of target
RotatedRect ret_rect = rects[ret_idx];
Rect ret_rect1 = ret_rect.boundingRect();
if (broadenRect(ret_rect1, 3, 3, _src.size()) == false)
return ret_rect;
//rectangle(_src, ret_rect1, CV_RGB(255,128,128),2);
//imshow("_src", _src);
Mat s_b = _ec(ret_rect1);
threshold(s_b, s_b, 128, 255, CV_THRESH_OTSU);
vector<vector<Point2i> > contours_br;
vector<Vec4i> hierarchy;
findContours(s_b, contours_br, hierarchy, CV_RETR_EXTERNAL , CV_CHAIN_APPROX_SIMPLE);
for (int k = 0; k < contours_br.size(); ++ k){
Rect r = boundingRect(contours_br[k]);
if (r.height > ret_rect.size.height){
ret_rect.size.height = r.height;
if(ret_rect.size.width / ret_rect.size.height < small_armor_wh_threshold)
_is_small_armor = true;
}
}
return ret_rect;
}