版权声明:本文为博主原创文章,未经博主允许不得转载。 https://blog.csdn.net/weixin_37895339/article/details/82863379
前文是一些针对IRL,IL综述性的解释,后文是针对《Generative adversarial imitation learning》文章的理解及公式的推导。
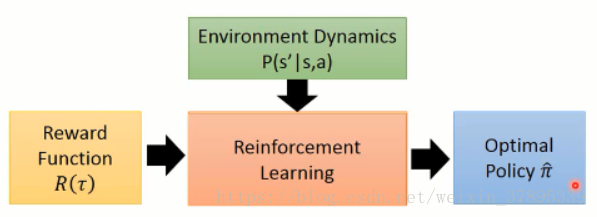
通过深度强化学习,我们能够让机器人针对一个任务实现从0到1的学习,但是需要我们定义出reward函数,在很多复杂任务,例如无人驾驶中,很难根据状态特征来建立一个科学合理的reward。
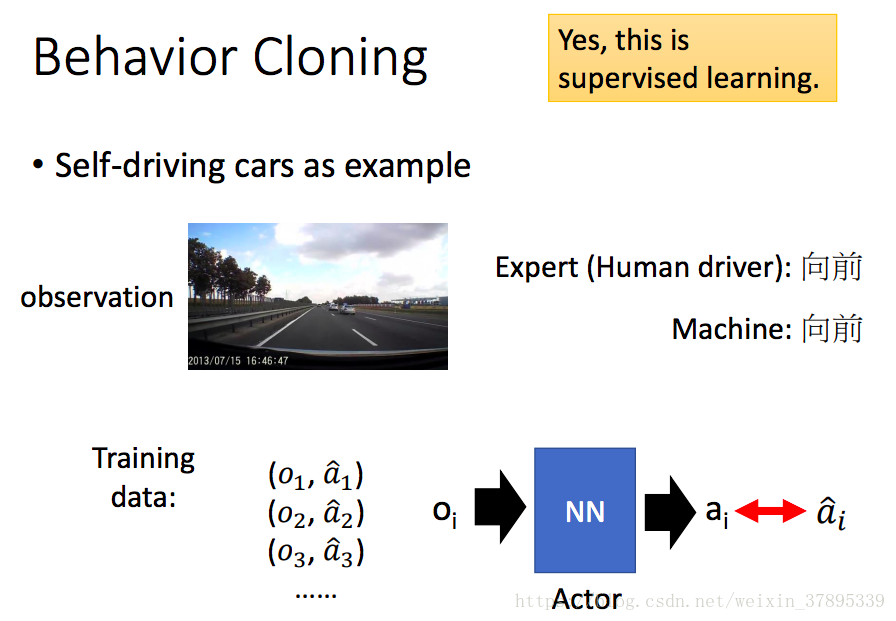
人类学习新东西有一个重要的方法就是模仿学习,通过观察别人的动作来模仿学习,不需要知道任务的reward函数。模仿学习就是希望机器能够通过观察模仿专家的行为来进行学习。
OpenAI,DeepMind,Google Brain目前都在向这方面发展。
[1] Model-Free Imitation Learning with Policy Optimization, OpenAI, 2016
[2] Generative Adversarial Imitation Learning, OpenAI, 2016
[3] One-Shot Imitation Learning, OpenAI, 2017
[4] Third-Person Imitation Learning, OpenAI, 2017
[5] Learning human behaviors from motion capture by adversarial imitation, DeepMind, 2017
[6] Robust Imitation of Diverse Behaviors, DeepMind, 2017
[7] Unsupervised Perceptual Rewards for Imitation Learning, Google Brain, 2017
[8] Time-Contrastive Networks: Self-Supervised Learning from Multi-View Observation, Google Brain, 2017
[9] Imitation from Observation/ Learning to Imitate Behaviors from Raw Video via Context Translation, OpenAI, 2017
[10] One Shot Visual Imitation Learning, OpenAI, 2017
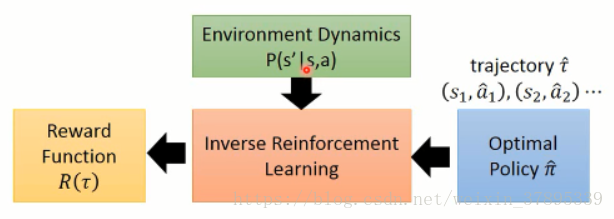
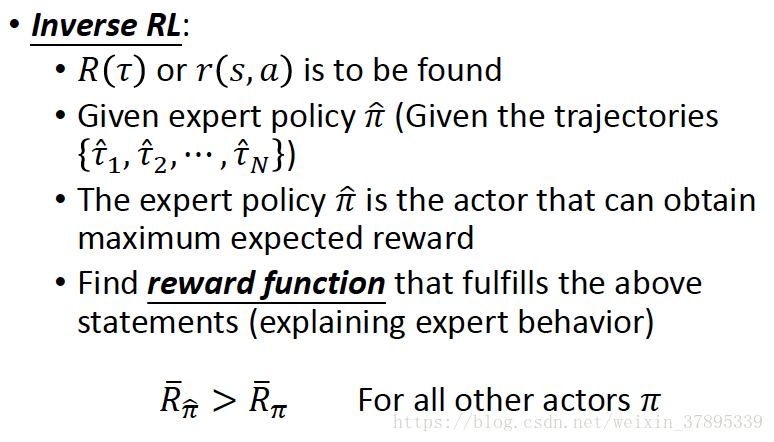
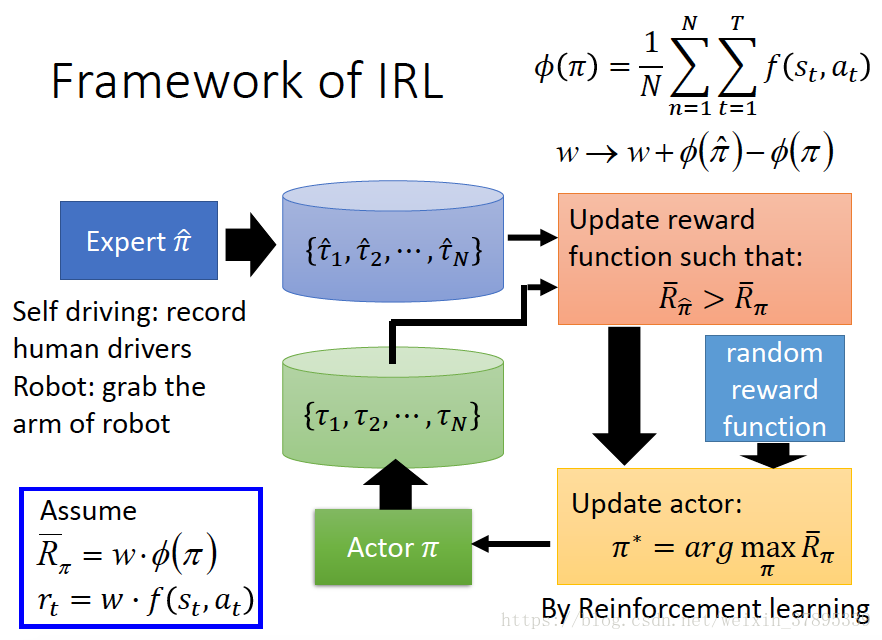
从给定的专家轨迹中进行学习。
机器在学习过程中能够跟环境交互,到那时不能直接获得reward。
在任务中很难定义合理的reward(自动驾驶中撞人reward,撞车reward,红绿灯reward),人工定义的reward可能会导致失控行为(让agent考试,目标为考100分,但是reward可能通过作弊的方式)。
三种方法:
行为克隆
逆向强化学习
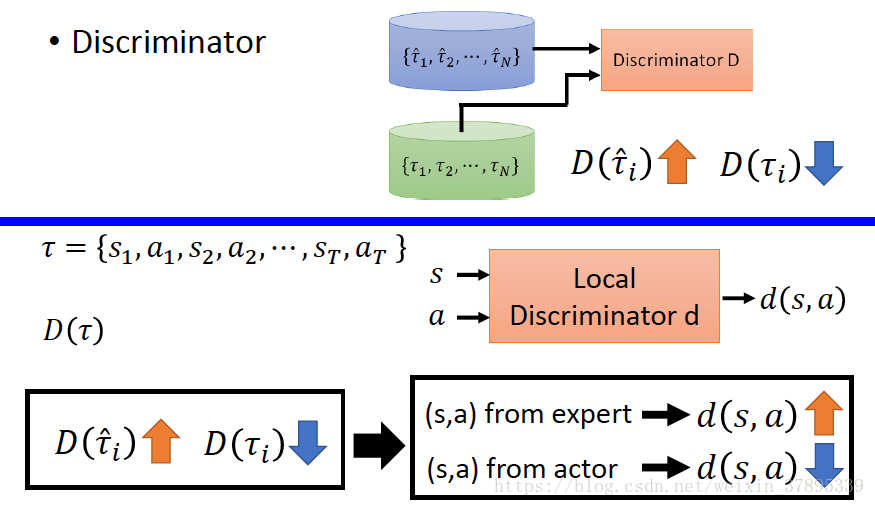
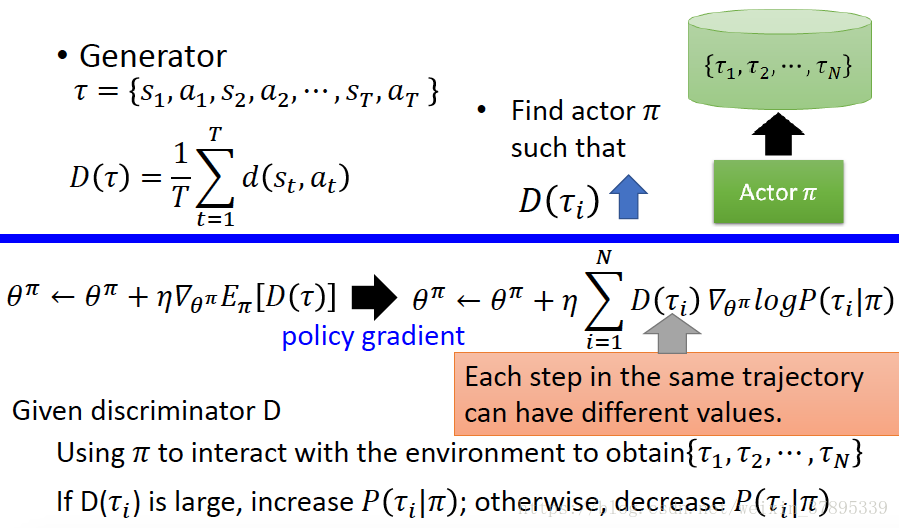
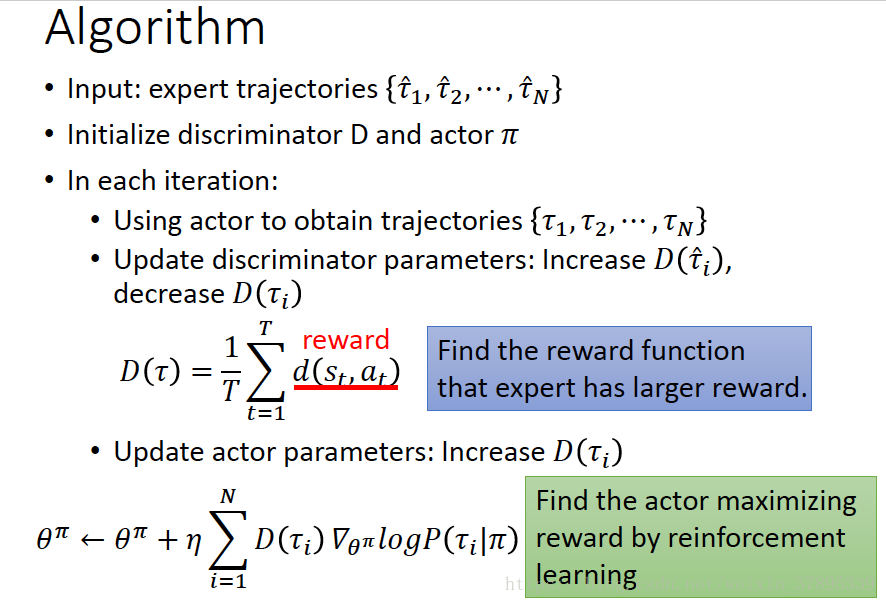
生成对抗模仿学习(GAN for Imitation Learning)
GAIL能够直接从专家轨迹中学得策略,绕过很多IRL的中间步骤。
假定cost function的集合为
C
\mathcal{C}
C
π
E
\pi_E
π E
ψ
\psi
ψ
I
R
L
ψ
(
π
E
)
=
arg
m
a
x
c
∈
C
−
ψ
(
c
)
+
(
min
π
∈
Π
−
H
(
π
)
+
E
π
[
c
(
s
,
a
)
]
)
−
E
π
E
[
c
(
s
,
a
)
]
\rm{IRL}_{\psi}(\pi_E) = \arg max_{c\in\mathcal{C}} -\psi(c)+(\min_{\pi \in \Pi}- \it {H}(\pi) + \mathbb E_\pi[c(s,a)]) - \mathbb E_{\pi_E}[c(s,a)]
I R L ψ ( π E ) = arg m a x c ∈ C − ψ ( c ) + ( π ∈ Π min − H ( π ) + E π [ c ( s , a ) ] ) − E π E [ c ( s , a ) ]
E
π
[
c
(
s
,
a
)
]
=
E
[
∑
t
=
0
∞
γ
t
c
(
s
t
,
a
t
)
]
\mathbb E_\pi[c(s,a)]=\mathbb E[\sum\limits_{t=0}^\infty \gamma^tc(s_t,a_t)]
E π [ c ( s , a ) ] = E [ t = 0 ∑ ∞ γ t c ( s t , a t ) ]
H
(
π
)
=
E
π
[
−
log
π
(
a
∣
s
)
]
H(\pi)=\mathbb E_\pi[-\log \pi(a|s)]
H ( π ) = E π [ − log π ( a ∣ s ) ]
γ
\gamma
γ
R
L
(
c
)
=
arg
m
i
n
π
∈
Π
−
H
(
π
)
+
E
π
[
c
(
s
,
a
)
]
\rm{RL}(c) = \arg min_{\pi \in \Pi} -\it H(\pi)+\mathbb E_\pi [c(s,a)]
R L ( c ) = arg m i n π ∈ Π − H ( π ) + E π [ c ( s , a ) ]
对于一个策略
π
\pi
π
ρ
π
:
S
×
A
→
R
\rho_\pi:\mathcal{S}\times\mathcal{A}\to \mathbb R
ρ π : S × A → R
ρ
π
(
s
,
a
)
=
π
(
a
∣
s
)
∑
t
=
0
∞
γ
t
P
(
s
t
=
s
∣
π
)
\rho_\pi(s,a) = \pi(a|s)\sum\limits_{t=0}^\infty\gamma^tP(s_t=s|\pi)
ρ π ( s , a ) = π ( a ∣ s ) t = 0 ∑ ∞ γ t P ( s t = s ∣ π )
π
\pi
π
D
\mathcal D
D
π
∈
Π
\pi \in \Pi
π ∈ Π
ρ
∈
D
\rho\in\mathcal D
ρ ∈ D
若
ρ
∈
D
\rho\in\mathcal D
ρ ∈ D
ρ
\rho
ρ
π
ρ
=
ρ
(
s
,
a
)
/
∑
a
′
ρ
(
s
,
a
′
)
\pi_{\rho}=\rho(s,a)/\sum\limits_{a'}\rho(s,a')
π ρ = ρ ( s , a ) / a ′ ∑ ρ ( s , a ′ )
π
ρ
\pi_{\rho}
π ρ
根据Definition 1 ,可以将
γ
\gamma
γ
E
π
[
c
(
s
,
a
)
]
=
∑
s
,
a
ρ
π
(
s
,
a
)
c
(
s
,
a
)
\mathbb E_\pi[c(s,a)]=\sum\limits_{s,a}\rho_\pi(s,a)c(s,a)
E π [ c ( s , a ) ] = s , a ∑ ρ π ( s , a ) c ( s , a )
若
H
(
π
)
=
E
π
[
−
log
π
(
a
∣
s
)
]
H(\pi)=\mathbb E_\pi[-\log\pi(a|s)]
H ( π ) = E π [ − log π ( a ∣ s ) ]
H
‾
(
ρ
)
=
−
∑
s
,
a
ρ
(
s
,
a
)
log
(
ρ
(
s
,
a
)
/
∑
a
′
ρ
(
s
,
a
′
)
)
\overline H(\rho)=-\sum\limits_{s,a}\rho(s,a)\log(\rho(s,a)/ \sum_{a'}\rho(s,a'))
H ( ρ ) = − s , a ∑ ρ ( s , a ) log ( ρ ( s , a ) / ∑ a ′ ρ ( s , a ′ ) )
H
‾
\overline H
H
π
∈
Π
,
ρ
∈
D
\pi \in \Pi, \rho \in \mathcal D
π ∈ Π , ρ ∈ D
H
(
π
)
=
H
‾
(
ρ
π
)
H(\pi)=\overline H(\rho_\pi)
H ( π ) = H ( ρ π )
H
(
π
ρ
)
=
H
‾
(
ρ
)
H(\pi_\rho)=\overline H(\rho_)
H ( π ρ ) = H ( ρ )
若
L
(
π
,
c
)
=
−
H
(
π
)
+
E
π
[
c
(
s
,
a
)
]
L(\pi,c)=-H(\pi)+\mathbb E_\pi[c(s,a)]
L ( π , c ) = − H ( π ) + E π [ c ( s , a ) ]
L
‾
(
ρ
,
c
)
=
−
H
‾
(
ρ
)
+
∑
s
,
a
ρ
(
s
,
a
)
c
(
s
,
a
)
\overline L(\rho,c) = -\overline H(\rho) + \sum_{s,a}\rho(s,a)c(s,a)
L ( ρ , c ) = − H ( ρ ) + ∑ s , a ρ ( s , a ) c ( s , a )
c
c
c
π
∈
Π
\pi\in\Pi
π ∈ Π
L
(
π
,
c
)
=
L
‾
(
ρ
π
,
c
)
L(\pi,c)=\overline L(\rho_\pi,c)
L ( π , c ) = L ( ρ π , c )
ρ
∈
D
\rho\in\mathcal D
ρ ∈ D
L
(
π
ρ
,
c
)
=
L
‾
(
ρ
,
c
)
L(\pi_\rho,c)=\overline L(\rho,c)
L ( π ρ , c ) = L ( ρ , c )
对于一个方程
f
:
R
R
×
A
→
R
‾
f:\mathbb R^{\mathcal R \times \mathcal A}\to \overline \mathbb R
f : R R × A → R
f
∗
:
R
R
×
A
→
R
‾
f^*:\mathbb R^{\mathcal R \times \mathcal A} \to \overline \mathbb R
f ∗ : R R × A → R
f
∗
(
x
)
=
sup
y
∈
R
S
×
A
x
T
y
−
f
(
y
)
f^*(x) = \sup_{y\in\mathbb R^{\mathcal S \times \mathcal A}}x^Ty-f(y)
f ∗ ( x ) = sup y ∈ R S × A x T y − f ( y )
$RL(\widetilde c) $是利用IRL恢复的cost,通过RL学得的policy。可得
R
L
∘
I
R
L
ψ
(
π
E
)
=
a
r
g
m
i
n
π
∈
Π
−
H
(
π
)
+
ψ
∗
(
ρ
π
−
ρ
π
E
)
RL\circ IRL_\psi(\pi_E) = argmin_{\pi\in\Pi}-H(\pi) + \psi^*(\rho_\pi - \rho_{\pi_{E}})
R L ∘ I R L ψ ( π E ) = a r g m i n π ∈ Π − H ( π ) + ψ ∗ ( ρ π − ρ π E )
ψ
\psi
ψ
ψ
∗
\psi^*
ψ ∗
(
c
,
π
)
(c,\pi)
( c , π )
ψ
\psi
ψ
(
c
,
π
)
(c,\pi)
( c , π )
在本文中将会主要介绍三种不同的正则化函数:恒定正则化函数,示性正则化函数,生成对抗正则化函数(GA)
若
ψ
\psi
ψ
c
~
∈
I
R
L
ψ
(
π
E
)
\widetilde c\in IRL_\psi(\pi_E)
c
∈ I R L ψ ( π E )
π
~
∈
R
L
(
c
~
)
\widetilde \pi\in RL(\widetilde c)
π
∈ R L ( c
)
ρ
π
~
=
ρ
π
E
\rho_{\widetilde \pi} = \rho_{\pi_E}
ρ π
= ρ π E
若没有正则化项,则RL得到的policy将会精确匹配专家policy
但该算法无法应用于实际系统中,因为实际系统的环境非常大,计算复杂。
学徒算法是想要找到一个policy并且比专家policy效果在学得的cost function
C
\mathcal C
C
min
π
max
c
∈
C
E
π
[
c
(
s
,
a
)
]
−
E
π
E
[
c
(
s
,
a
)
]
\min_\pi \max_{c\in\mathcal C} \mathbb E_\pi[c(s,a)] - \mathbb E_{\pi_E}[c(s,a)]
π min c ∈ C max E π [ c ( s , a ) ] − E π E [ c ( s , a ) ]
C
\mathcal C
C
f
1
,
f
2
,
…
,
f
d
f_1,f_2,\dots,f_d
f 1 , f 2 , … , f d
C
l
i
n
e
a
r
=
{
∑
i
w
i
f
i
:
∥
w
∥
2
≤
1
}
\mathcal C_{linear} = \{ \sum_i w_if_i:\|w\|_2\le1\}
C l i n e a r = { ∑ i w i f i : ∥ w ∥ 2 ≤ 1 }
C
c
o
n
v
e
x
=
{
∑
i
w
i
f
i
:
∑
i
w
i
=
1
,
w
i
≥
0
∀
i
}
\mathcal C_{convex}=\{ \sum_i w_if_i:\sum_iw_i=1,w_i\ge 0 \forall i\}
C c o n v e x = { ∑ i w i f i : ∑ i w i = 1 , w i ≥ 0 ∀ i }
对于示性函数
δ
c
:
R
S
×
A
→
R
‾
\delta_c:\mathbb R^{\mathcal S \times \mathcal A}\to \overline \mathbb R
δ c : R S × A → R
δ
C
(
c
)
=
{
0
,
c
∈
C
+
∞
,
o
t
h
e
r
w
i
s
e
\delta_{\mathcal C}(c) =\left\{ \begin{array}{lr} 0, & c\in\mathcal C \\ +\infty, & otherwise \end{array} \right.
δ C ( c ) = { 0 , + ∞ , c ∈ C o t h e r w i s e
max
c
∈
C
E
π
[
c
(
s
,
a
)
]
−
E
π
E
[
c
(
s
,
a
)
]
=
max
c
∈
C
−
δ
C
(
c
)
+
∑
s
,
a
(
ρ
π
(
s
,
a
)
−
ρ
π
E
(
s
,
a
)
)
c
(
s
,
a
)
=
δ
C
∗
(
ρ
π
−
ρ
π
E
)
\begin{aligned} &\max_{c\in\mathcal C} \mathbb E_\pi[c(s,a)] - \mathbb E_{\pi_E}[c(s,a)] \\ &=\max_{c\in\mathcal C} -\delta_{\mathcal C}(c)+\sum_{s,a}(\rho_\pi(s,a)-\rho_{\pi_E}(s,a))c(s,a) \\ &=\delta_{\mathcal C}^*(\rho_\pi - \rho_{\pi_E}) \end{aligned}
c ∈ C max E π [ c ( s , a ) ] − E π E [ c ( s , a ) ] = c ∈ C max − δ C ( c ) + s , a ∑ ( ρ π ( s , a ) − ρ π E ( s , a ) ) c ( s , a ) = δ C ∗ ( ρ π − ρ π E )
min
π
−
H
(
π
)
+
max
c
∈
C
E
π
[
c
(
s
,
a
)
]
−
E
π
E
[
c
(
s
,
a
)
]
=
min
π
−
H
(
π
)
+
δ
C
∗
(
ρ
π
−
ρ
π
E
)
\min_\pi - H(\pi)+\max_{c\in\mathcal C}\mathbb E_\pi[c(s,a)] - \mathbb E_{\pi_E}[c(s,a)] = \min_{\pi} -H(\pi)+\delta_{\mathcal C}^*(\rho_\pi-\rho_{\pi_E})
π min − H ( π ) + c ∈ C max E π [ c ( s , a ) ] − E π E [ c ( s , a ) ] = π min − H ( π ) + δ C ∗ ( ρ π − ρ π E )
ψ
=
δ
C
\psi=\delta_{\mathcal C}
ψ = δ C
ψ
G
A
(
c
)
=
{
E
π
E
[
g
(
c
(
s
,
a
)
)
]
,
c
<
0
+
∞
,
o
t
h
e
r
w
i
s
e
g
(
x
)
=
{
−
x
−
log
(
1
−
e
x
)
,
x
<
0
0
,
o
t
h
e
r
w
i
s
e
\psi_{GA}(c) = \left\{ \begin{array}{lr} \mathbb E_{\pi_E}[g(c(s,a))],\qquad &c<0 \\ +\infty, & otherwise \end{array} \right. \\ g(x)=\left\{ \begin{array}{lr} -x-\log(1-e^x),\qquad &x<0 \\ 0, & otherwise \end{array} \right.
ψ G A ( c ) = { E π E [ g ( c ( s , a ) ) ] , + ∞ , c < 0 o t h e r w i s e g ( x ) = { − x − log ( 1 − e x ) , 0 , x < 0 o t h e r w i s e
ψ
G
A
\psi_{GA}
ψ G A 不像
δ
C
\delta_{\mathcal C}
δ C
ψ
G
A
\psi_{GA}
ψ G A
选择
ψ
G
A
\psi_{GA}
ψ G A
ψ
G
A
∗
(
ρ
π
−
ρ
π
E
)
=
max
D
∈
(
0
,
1
)
S
×
A
E
π
E
[
log
(
D
(
s
,
a
)
)
]
+
E
π
[
log
(
1
−
D
(
s
,
a
)
)
]
\psi_{GA}^*(\rho_\pi-\rho_{\pi_E}) = \max_{D\in(0,1)^{\mathcal S \times \mathcal A}} \mathbb E_{\pi_E}[\log(D(s,a))] + \mathbb E_\pi[\log(1-D(s,a))]
ψ G A ∗ ( ρ π − ρ π E ) = D ∈ ( 0 , 1 ) S × A max E π E [ log ( D ( s , a ) ) ] + E π [ log ( 1 − D ( s , a ) ) ]
π
\pi
π
π
E
\pi_E
π E
D
J
S
(
ρ
π
,
ρ
π
E
)
=
D
K
L
(
ρ
π
∥
(
ρ
π
−
ρ
π
E
)
/
2
)
+
D
K
L
(
ρ
π
E
∥
(
ρ
E
+
ρ
π
E
)
/
2
)
D_{JS}(\rho_\pi,\rho_{\pi_E}) = D_{KL}(\rho_\pi \|(\rho_\pi - \rho_{\pi_E})/2)+D_{KL}(\rho_{\pi_E}\|(\rho_E+\rho_{\pi_E})/2)
D J S ( ρ π , ρ π E ) = D K L ( ρ π ∥ ( ρ π − ρ π E ) / 2 ) + D K L ( ρ π E ∥ ( ρ E + ρ π E ) / 2 )
min
π
ψ
G
A
∗
(
ρ
π
−
ρ
π
E
)
−
λ
H
(
π
)
⟺
min
π
max
D
E
π
E
[
log
(
D
(
s
,
a
)
)
]
+
E
π
[
log
(
1
−
D
(
s
,
a
)
]
−
λ
H
(
π
)
⟺
min
π
D
J
S
(
ρ
π
,
ρ
π
E
)
−
λ
H
(
π
)
\min_{\pi}\psi_{GA}^*(\rho_\pi - \rho_{\pi_E})-\lambda H(\pi) \Longleftrightarrow \\ \min_{\pi}\max_{D}\mathbb E_{\pi_E}[\log(D(s,a))]+\mathbb E_{\pi}[\log(1-D(s,a)]-\lambda H(\pi) \Longleftrightarrow \\ \min_{\pi}D_{JS}(\rho_\pi,\rho_{\pi_E}) - \lambda H(\pi)
π min ψ G A ∗ ( ρ π − ρ π E ) − λ H ( π ) ⟺ π min D max E π E [ log ( D ( s , a ) ) ] + E π [ log ( 1 − D ( s , a ) ] − λ H ( π ) ⟺ π min D J S ( ρ π , ρ π E ) − λ H ( π )
min
G
max
D
E
x
∼
P
d
a
t
a
(
x
)
[
log
D
(
x
)
]
+
E
z
∼
P
z
(
z
)
[
log
(
1
−
D
(
G
(
z
)
)
)
]
\min_G\max_D \mathbb E_{x\sim P_{data}(x)}[\log D(x)] + \mathbb E_{z\sim P_z(z)}[\log(1-D(G(z)))]
G min D max E x ∼ P d a t a ( x ) [ log D ( x ) ] + E z ∼ P z ( z ) [ log ( 1 − D ( G ( z ) ) ) ]
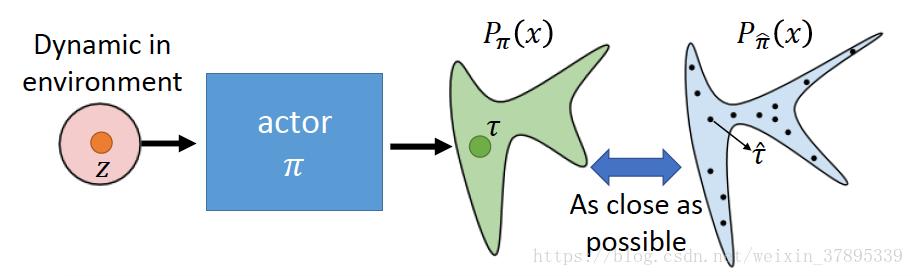
学习到的policy的占用率度量
ρ
π
\rho_\pi
ρ π
专家经验的占用率度量
ρ
π
E
\rho_{\pi_E}
ρ π E
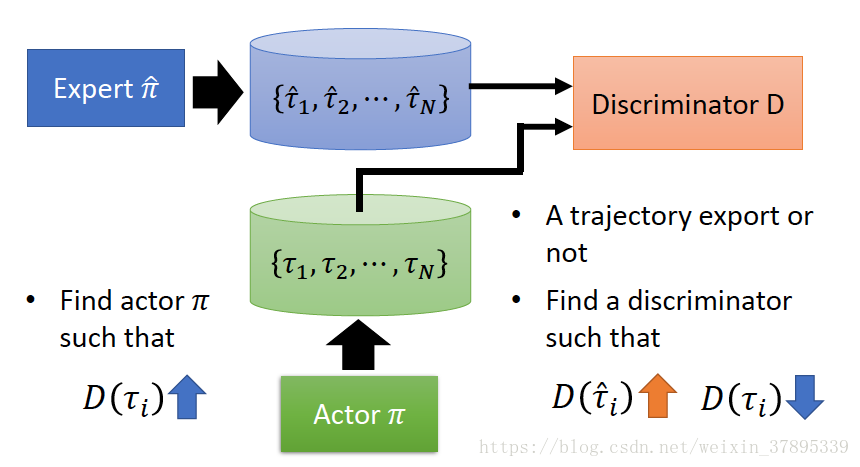
期望找到如下式的鞍点
(
π
,
D
)
(\pi,D)
( π , D )
E
π
E
[
log
(
D
(
s
,
a
)
)
]
+
E
π
[
log
(
1
−
D
(
s
,
a
)
)
]
−
λ
H
(
π
)
\mathbb E_{\pi_E}[\log(D(s,a))] + \mathbb E_\pi[\log(1-D(s,a))]-\lambda H(\pi)
E π E [ log ( D ( s , a ) ) ] + E π [ log ( 1 − D ( s , a ) ) ] − λ H ( π )
π
θ
\pi_\theta
π θ
θ
\theta
θ
D
ω
D_\omega
D ω
ω
\omega
ω 对
ω
\omega
ω
对
θ
\theta
θ
TPRO能够保证
π
θ
i
+
1
\pi_{\theta_{i+1}}
π θ i + 1
π
θ
i
\pi_{\theta_{i}}
π θ i