版权声明:本文为博主原创文章,未经博主允许不得转载。 https://blog.csdn.net/YuYunTan/article/details/84344977
一维射影几何
线的射影几何形状
IP1的推导以与平面大致相同的方式进行。 线上的点
x由齐次坐标
(x1,x2)T表示,并且
x2=0的点是线的理想点。 我们将使用符号
xˉ来表示2维向量
(x1,x2)T。 线的投影变换由
2×2齐次矩阵表示
xˉ′=H2×2xˉ
并且具有对应于矩阵的四个元素的3个自由度,对应于整体缩放的一个自由度。 可以从三个对应点确定线的投影变换。
交比。在博文此处曾提过交比是
IP1的基本射影不变量。 给定4个点
xˉ,交比定义为
Cross(xˉ1,xˉ2,xˉ3,xˉ4)=∣xˉ1xˉ3∣∣xˉ2xˉ4∣∣xˉ1xˉ2∣∣xˉ3xˉ4∣
其中
∣xˉixˉj∣=det[xi1xi2xj1xj2]
关于交比注释:
-
交比的值不取决于使用哪个特定的齐次表示点
xˉi,因为分子和分母的缩放因子在它们之间抵消。
-
如果每个点
xˉi是一个有限点并且选择齐次表示使得
x2=1,那么
∣xˉixˉj∣表示从
xˉi到
xˉj的符号距离。
-
如果其中一个点
xˉi是理想点,则交比的定义也是有效的。
-
在线的任何射影变换下,交比的值是不变的
xˉ′=H2×2xˉ,则
Cross(xˉ1′,xˉ2′,xˉ3′,xˉ4′)=Cross(xˉ1,xˉ2,xˉ3,xˉ4)
交比对于直线的射影坐标旋转是不变量。
平面射影变换下,平面上任何直线都难引起1D射影变换。
图1说明了具有等效交比的线之间的许多射影变换。
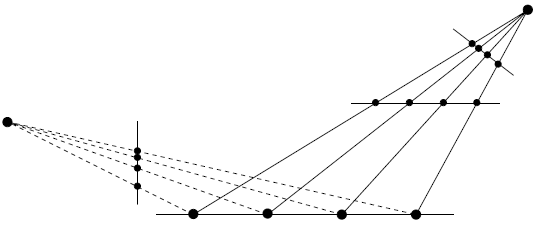
图1。 线条之间的射影变换。 该图中有四组四个共线点。 每组通过线到线的射影变换与其他组相关。 由于交比在射影变换下是不变的,因此交比对于所示的所有组具有相同的值。
共点线。 共点线是线上的共线点的对偶。 这意味着平面上的共点线也具有几何
IP1。 特别是四条共点线具有确定交比,如图2(a)所示。
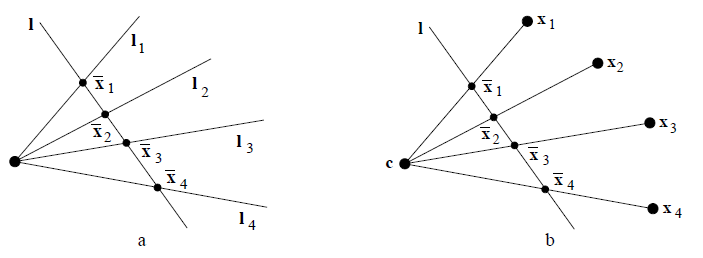
图2。 共点线。 (a)四个共点线
Ii与线
l相交于四个点
xˉi。 这些线的交比对于平面的射影变换是不变量。 它的值由点的交比
Cross(xˉ1,xˉ2,xˉ3,xˉ4)给出。 (b)共面点
xi通过具有中心
c的投影成像到线
l(也在平面中)。 图像点的交比对图像线
l的位置是不变的。
注意图2(b)可以被认为是表示将
IP2中的点投影到一维图像中。 特别地,如果
c表示相机中心,并且线
l表示图像线(图像平面的1D模拟),则点
xˉi是图像中的点
xi的投影。 点的交比表征四个像点的射影配置。 注意,就四个像点的射影配置而言,像线(image line)的实际位置是无关紧要的 - 像线的不同选择产生像点的投影等效配置。
在射影几何中使用交比来测量透视投影中描绘的特征的真实世界尺寸。A,B,C,D和V是图像上的点,它们的分离以像素给出; A’,B’,C’和D’在现实世界中,它们以米为单位分开.
- 在(1)中,侧街道的宽度W由相邻商店的已知宽度计算。
- 在(2)中,只需要一个商店的宽度,因为消失点 V是可见的。
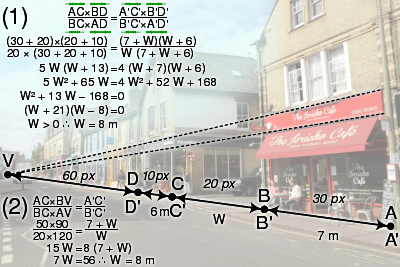
图3。交比的射影几何