版权声明:本文为博主原创文章,未经博主允许不得转载。 https://blog.csdn.net/YuYunTan/article/details/84146195
MVG学习笔记(11) --变换层次
射影变换组成一个群,称为射影线性群。
n×n可逆实矩阵为一般线性群,称为
GL(n)。将相差纯量因子矩阵视为等同得到射影线性群
PL(n),是
GL(n)的商群。
PL(3)的重要子群有仿射群和欧式群。仿射群是
PL(3)中最后一行为
(0,0,1)的矩阵组成的子群;欧氏群是仿射群的子群,左上角
2×2矩阵是正交的,若该矩阵行列式为1,则为定向欧氏群。

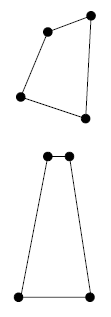
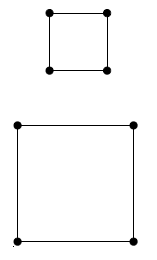
图1,在中心投影下的失真,瓷砖地板的图像。 (a)相似变换:圆似圆,方似方。 平行或垂直的线在图像中相同定向。 (b)仿射:圆成椭圆。 世界垂直线不再是垂直线。 然而,平行依旧平行。 (c)射影:平行线变成会聚线。 靠近相机的瓷砖比远处的瓷砖更大。
不变量。 将变换视为作用于点或曲线的坐标的矩阵的代数方法,其中保持不变元素或量为不变量,用以介绍变换。 几何配置的(标量)不变量是配置的函数,其值通过特定变换而不变。 例如,两个点的距离在欧式变换(平移和旋转)不变,而相似变换(例如平移,旋转和均匀缩放)下不保持。 因此,距离是欧式不变量,但不是相似不变量。 两线的夹角既是欧式又是相似不变量。
等距变换(Isometries)
等距变换是平面
IR的变换,保持欧式距离不变(ios=一样,metric=度量)。
等距变换可以表示为:
⎝⎛x′y′1⎠⎞=⎣⎡εcosθεsinθ0−sinθcosθ0txty1⎦⎤⎝⎛xy1⎠⎞
其中
ε=±1,如果
ε=1则等距变换是保向的切是欧氏变换(平移和旋转的复合),反之是逆向的。例如反射(又对角矩阵
diag(−1,1,1)表示)与欧氏变换的复合。
欧氏变换是刚体运动模型,是最重要的等距变换,而保向等距变换在结构恢复时出现多义性。
平面欧氏变换用简洁分块形式写成:
x′=HEx=[R0Tt1]x
其中
R是
2×2旋转矩阵(满足
RTR=RRT=I的正交矩阵),
t是二维平移矢量,而
0T是二维零矢量。特殊情况是纯旋转(
t=0)和纯平移(
R=I)。欧氏变换也称为移位(displacement)。
平面欧氏变换有三个自由度:旋转占一个,平移占两个。因此必须制定三个参数才能确定该变换。可以由两组点对应来计算该变换。
旋转的自由度是角度
θ,平移是两个轴方向上的位移量
不变量 长度(两点间距离),角度(两线夹角)和面积。
群和定向。 如果左上方
2×2矩阵具有行列式1,则等距变换是保向的。保向的等距形成一个群,而方逆向的等距则不是。 这种区别也适用于相似变换和仿射变换的情况。
相似变换(Similarity transformations)
相似变换是一个等距变换与一个均匀缩放的复合。当欧氏变换(没有反射)与均匀缩放复合时,相似变换矩阵表示为:
⎝⎛x′y′1⎠⎞=⎣⎡scosθssinθ0−ssinθscosθ0txty1⎦⎤⎝⎛xy1⎠⎞
以更简洁的矩阵分块形式写成:
x′=Hsx=[sR0Tt1]x
其中
s表示均匀缩放。相似变换也才称等形变换,因为其保持“形状”。平面相似变换具有四个自由度(多出来缩放因子
s),可以由两组对应点算出。
不变量:直线夹角(不受缩放影响),平行线依旧平行,两点间距离不是,但长度比率是(缩放因子互相抵消)。面积比率也是(缩放因子的平方被抵消)。
度量结构:确定到只相差一个相似变换的结构。
仿射变换
由一非奇异线性变换与一平移变换复合。矩阵表示为:
⎝⎛x′y′1⎠⎞=⎣⎡a11a210a12a220txty1⎦⎤⎝⎛xy1⎠⎞
或分块形式:
x′=HAx=[A0Tt1]x
其中
A是
2×2的非奇异矩阵(行列式不为0的满秩矩阵)。平面仿射变换有六个自由度,对于六个矩阵元素(前两行),可以通过三组对应点来计算。
仿射变换
A的几何效应看成是选择和非均匀缩放的复合,由SVD分解为:
A=UDVT=(UVT)(UDVT)=R(θ)(R(−ϕ)DR(ϕ))(1)
其中
R(θ),R(ϕ)分布表示旋转角为
θ,ϕ的旋转,而
D为对角矩阵:
D=[λ100λ2]
仿射变换被看成是旋转
ϕ,假设已选择的
x和
y的方向分别进行按比例因子
λ1和
λ2的缩放,再假设一个回转(
−ϕ)后最后一个旋转
θ。与相似变换比,“新”几何仅仅是非均匀缩放,使得仿射变换比相似变换多两个自由度。它们是缩放方向的角度
ϕ和缩放参数比率
λ1:λ2。
仿射变换的本质是特定角的两个垂直方向进行缩放。
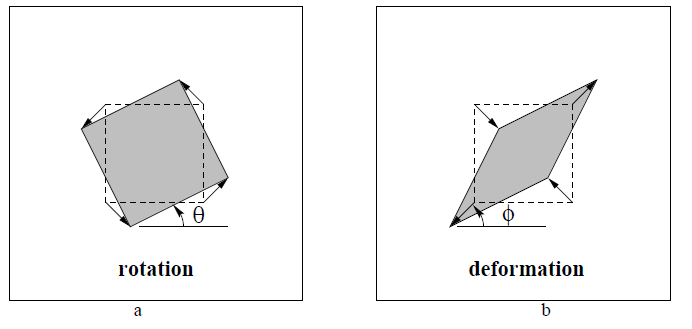
平面仿射变换失真:(a)旋转
R(θ);(b)形变
R(−ϕ)DR(ϕ),注意形变方向是正交的。
不变量:
(1)平行依然平行:相交的无穷远点被映射到另一个无穷远点。
(2)平行线段长度比:直线段长度缩放仅与该线段方向和缩放方向之间夹角有关。假定线段与正交缩放方向
x−轴的夹角为
α,那么缩放大小为
λ12cos2α+λ22sin2α
,该缩放因子对所有同向直线一样,所以平行线比率中被抵消。
(3)面积比。从公式(1)分解式得到该不变性。旋转和平移不影响面积,起作用的是
λ1,λ2的缩放,效果是面积被缩放了
λ1λ2=detA倍。面积比该因子被抵消,然而在射影变换中不成立。
根据
detA的正负判断仿射变换是保向还是逆向的。
射影变换
射影矩阵的矩阵表达为:
⎝⎛x1′x2′x3′⎠⎞=⎣⎡h11h21h31h12h22h32h13h23h33⎦⎤⎝⎛x1x2x3⎠⎞
是其齐次坐标的一般非奇异线性变换,是仿射变换的推广,仿射变换是非齐次坐标的一般非奇异线性变换加上平移的复合,其矩阵分块形式为:
x′=HPx=[AvTtv]x
其中矢量
v=(v1,v2)T。齐次矩阵九个元素仅它们之间比率有意义,自由度为8。并不是总有可能通过对矩阵缩放而取
v为1,因为
v可能是0。两平面的射影变换可由四组点对应计算,但属于同一平面的三点必须不共线。
不变量:四共线点的交比,即直线上长度的交比;

图2:射影变换下的四个共线点交比不变
注意图2,点
A,B,C,D和
A′,B′,C′,D′通过投影变换相关,因此它们的交比
(A,B;C,D)和
(A′,B′;C′,D′)是平等的。
(A,B;C,D)=BC⋅ADAC⋅BD
射影变换的分解
射影变换可以分解为一串变换链的复合,链中每个句子比其一个矩阵所表示的变换层次高。
H=HsHAHp=[sR0Tt/v1][K0T01][1vT0v]=[AvTtv]
其中
A=sRK+tvT/v,而且
K满足
detK=1的归一化上三角矩阵。如果
v̸=0则上述分解有效,而且如果
s取正值,则还是唯一的。
Hs,HA,Hp分别是相似变换、仿射变换和射影变换。
Hp(2自由度)移动无穷远执行,属于有约束透视变换。
HA(2自由度)影响仿射性质而不移动无穷远线。
Hs是一般相似变换(4自由度),并不影响仿射和射影性质。
总结
| 群 |
矩阵 |
自由度 |
失真 |
不变性质 |
| 射影 |
⎣⎡h11h21h31h12h22h32h13h23h33⎦⎤ |
8 |
 |
共点
共线
接触的阶:相交(一阶接触);相切(二阶接触);拐点(与直线的3阶接触);切线不连续和奇点(cups)。交比(长度比的比) |
| 仿射 |
⎣⎡a11a210a12a220txty1⎦⎤ |
6 |
 |
平行;面积比;体积比;共线线段或平行线段的长度比(如中点),矢量线性组合(如形心)。无穷远线
I∞ |
| 相似 |
⎣⎡sr11sr210sr12sr220txty1⎦⎤ |
4 |
 |
长度比;夹角;虚圆点;体积比 |
| 欧氏 |
⎣⎡r11r210r12r220txty1⎦⎤ |
3 |
 |
长度;面积;体积 |
仿射变换介于相似和射影之间,其推广相似变换使得夹角不再保持,造成物体形状变换后歪斜。仿射变换对平面作用是均匀的,平面上任何地方的物体(正方形)的面积缩放因子
detA都一样。直线变换方向取决于其原来方向,而它在平面上位置无关。射影变换使得面积缩放随位置改变而改变(透视变换下,较远正方形比较近的正方形小,见图1);且直线变换方向即取决于原线方向又取决于其位置。
射影与仿射区别于射影中矢量
v不是零,引起了射影变换的非线性效果。
理想点
(x1,x2,0)在仿射和射影下映射作对比,仿射
[A0Tt1]⎝⎛x1x20⎠⎞=⎝⎛A(x1x2)0⎠⎞
而射影
[AvTtv]⎝⎛x1x20⎠⎞=⎝⎛A(x1x2)v1x1+v2x2⎠⎞
即仿射中理想点还在无穷远处,而射影却将之映射到有限点,因此其可以对消失点(灭点)建模。
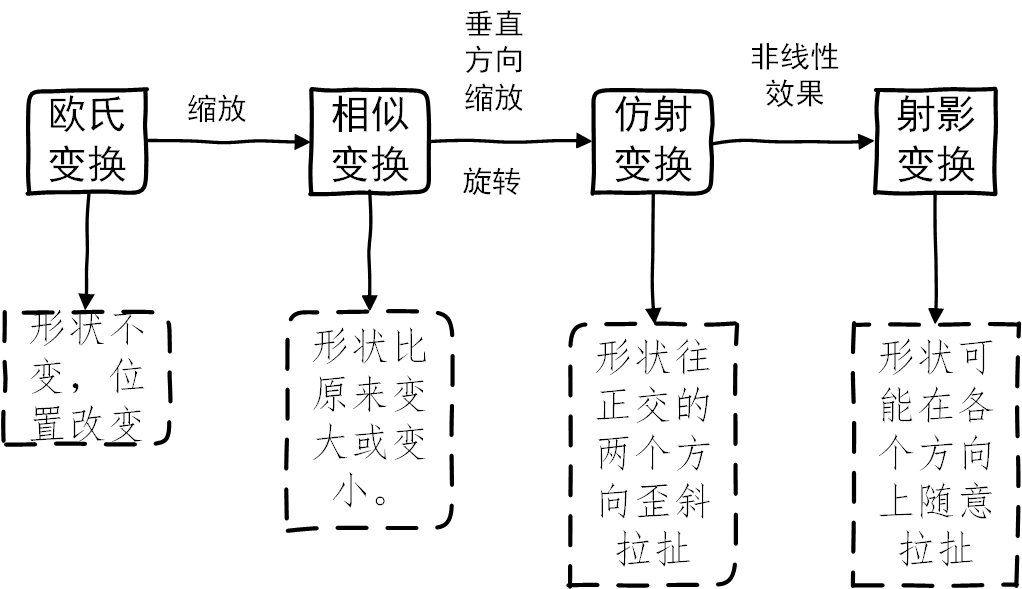
下面是博主自认为四者关系的观点,若是有误请提出。