http://wiki.ros.org/smach/Tutorials/User%20Data
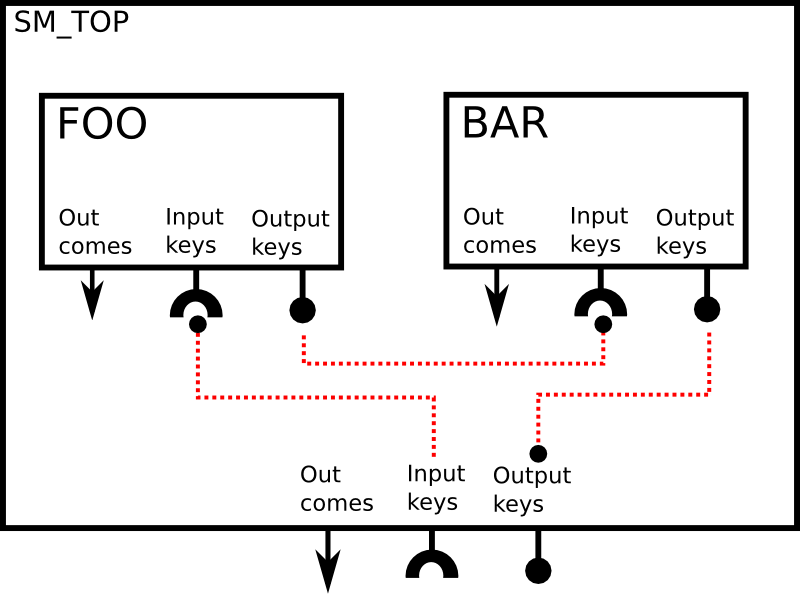
两个状态之间通过数据交流的方式进行状态转移。
#!/usr/bin/env python
import rospy
import smach
import smach_ros
# define state Foo
class Foo(smach.State):
def __init__(self):
smach.State.__init__(self,
outcomes=['outcome1','outcome2'],
input_keys=['foo_counter_in'],
output_keys=['foo_counter_out'])
def execute(self, userdata):
rospy.loginfo('Executing state FOO')
if userdata.foo_counter_in < 3:
userdata.foo_counter_out = userdata.foo_counter_in + 1
return 'outcome1'
else:
return 'outcome2'
# define state Bar
class Bar(smach.State):
def __init__(self):
smach.State.__init__(self,
outcomes=['outcome1'],
input_keys=['bar_counter_in'])
def execute(self, userdata):
rospy.loginfo('Executing state BAR')
rospy.loginfo('Counter = %f'%userdata.bar_counter_in)
return 'outcome1'
def main():
rospy.init_node('smach_example_state_machine')
# Create a SMACH state machine
sm = smach.StateMachine(outcomes=['outcome4'])
sm.userdata.sm_counter = 0
# Open the container
with sm:
# Add states to the container
smach.StateMachine.add('FOO', Foo(),
transitions={'outcome1':'BAR',
'outcome2':'outcome4'},
remapping={'foo_counter_in':'sm_counter',
'foo_counter_out':'sm_counter'})
smach.StateMachine.add('BAR', Bar(),
transitions={'outcome1':'FOO'},
remapping={'bar_counter_in':'sm_counter'})
# Execute SMACH plan
outcome = sm.execute()
if __name__ == '__main__':
main()