前言:URDF建模很粗糙,而ros提供了支持sw转urdf的插件,可以使建模更精细化.
一、安装sw_urdf_exporter插件
sw_urdf_exporter插件网址:http://wiki.ros.org/sw_urdf_exporter
安装时关闭sw,一路默认安装就可以了.
二、SW转URDF
使用SW打开将要转化的零件图,注意将零件图名字换成英文,不然一会会乱码。
例如我将这张图忘记改成test了。
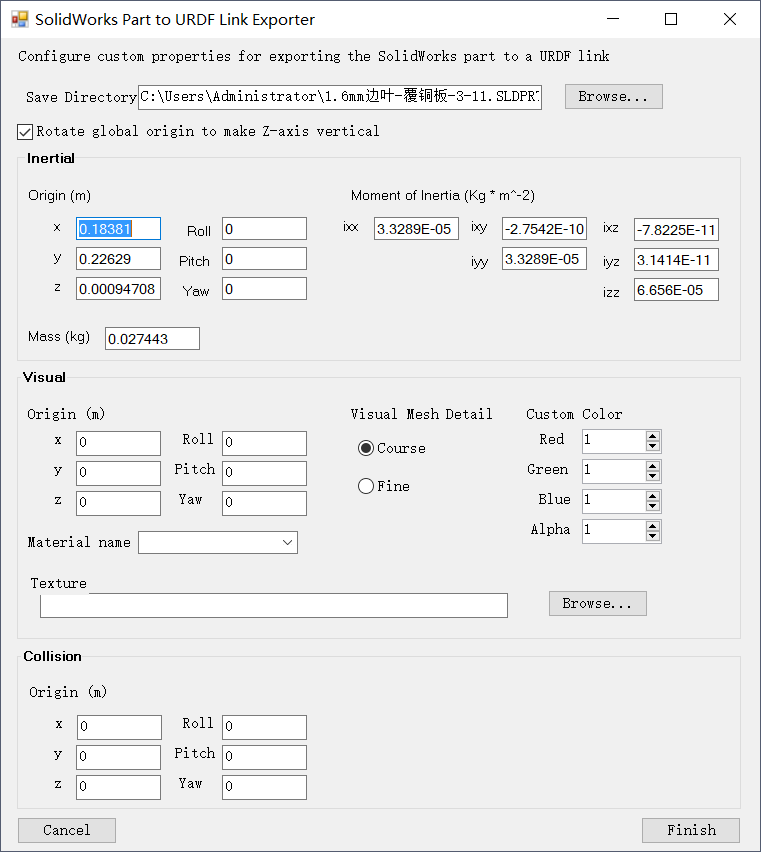
然后打开sw_urdf_exporter插件 
选择保存位置,适当调整参数,如果想尽快体验,就默认不调整了。点finish
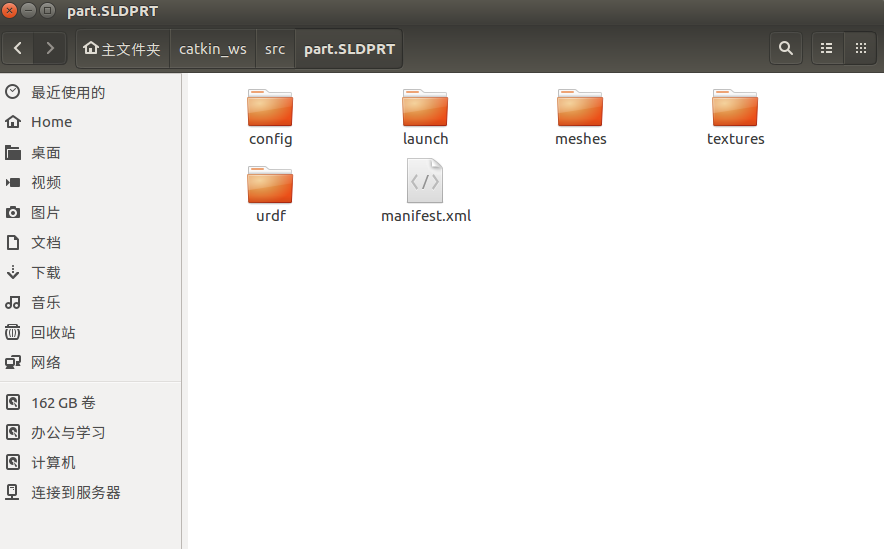
这时在保存路径上会生成功能包,
其中第一个是错误示范,忘记改名字,
第二个是正确示范。

三、修改文件
3.1 将part.SLDPRT功能包原封不动放在工作空间的src内
3.2 修改urdf文件和manifest.xml文件
如果urdf文件名是乱码,则修改为test ,并将test.urdf内一切乱码(其实就是中文)替换为test
manifest.xml文件内的乱码也修改为test
如无乱码则这步不用操作
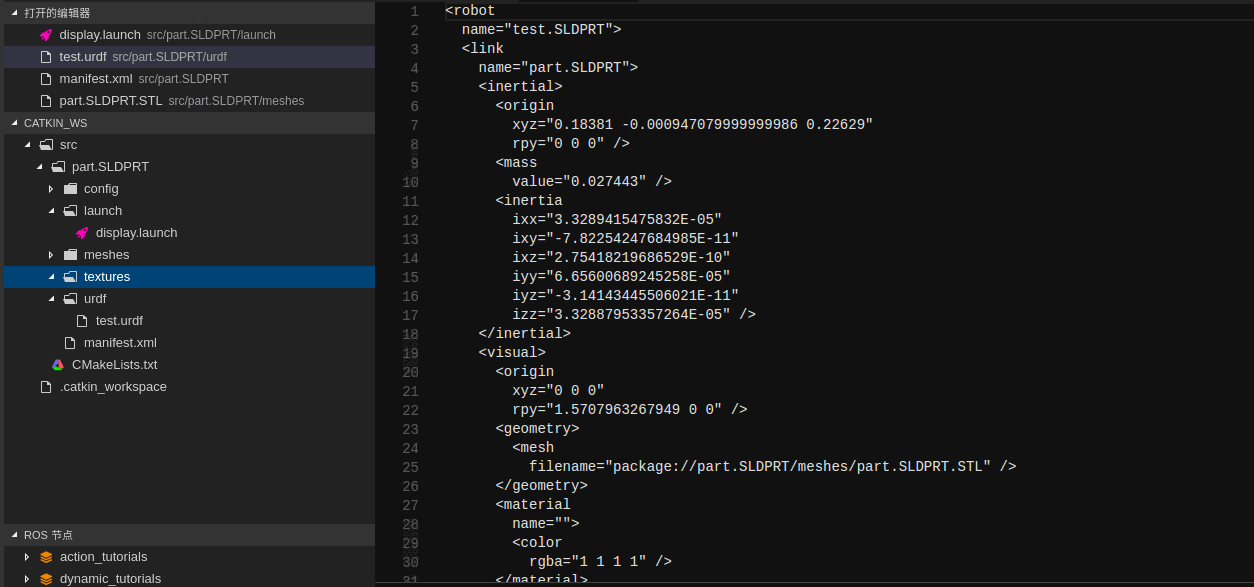
3.3 新建launch文件
在launch文件夹下新建display.launch文件,内容如下:
<launch> <param name="robot_description" textfile="$(find part.SLDPRT)/urdf/test.urdf" /> <node name="rviz" pkg="rviz" type="rviz" args="-d $(find part.SLDPRT)/test.rviz" /> </launch>
四、运行
启动dispaly.launch文件
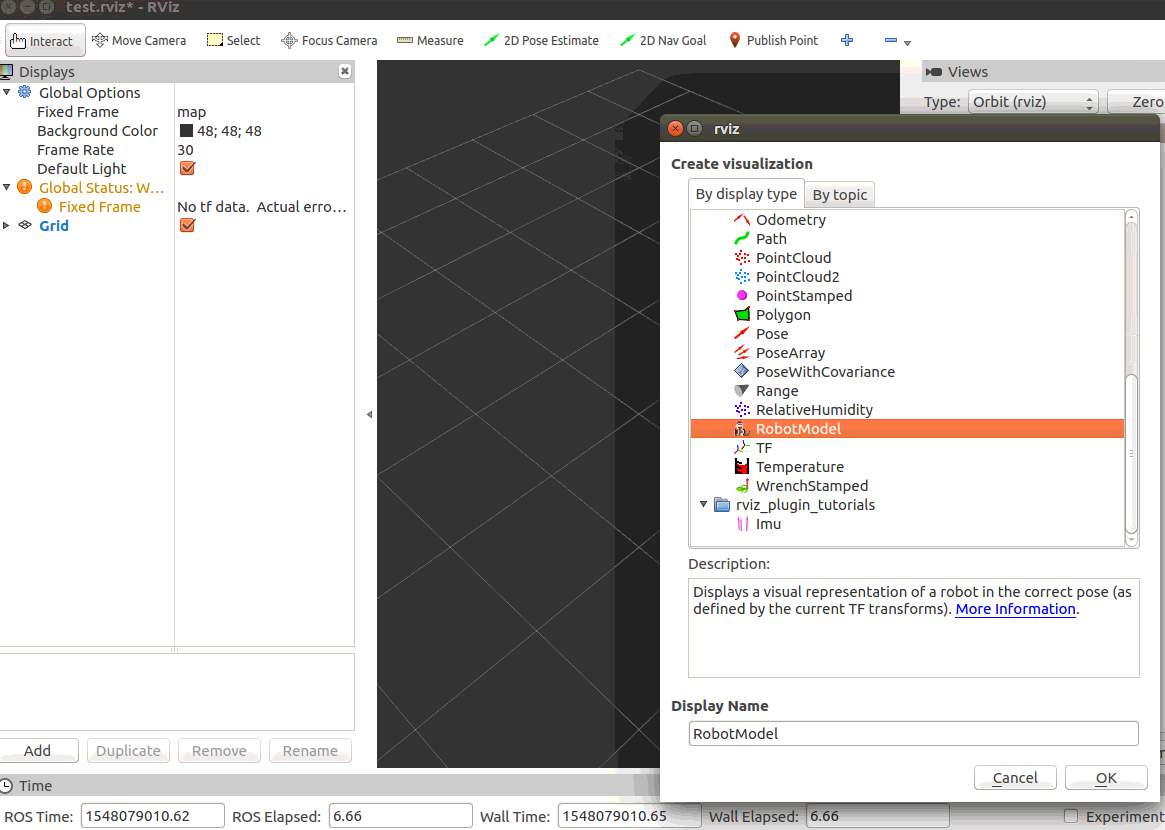
并在rviz里add robomodel
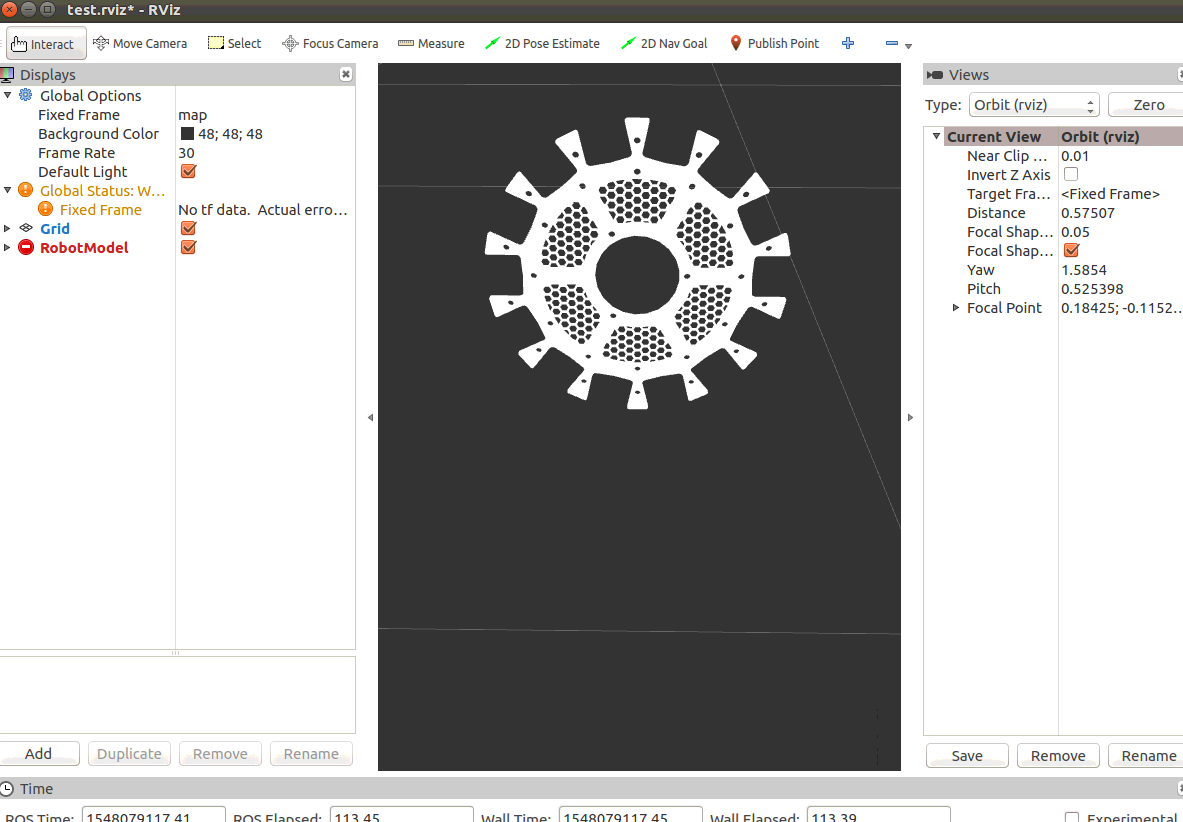
放大后效果如下:
-END-