目录
一 ROS 中的slam包及map介绍
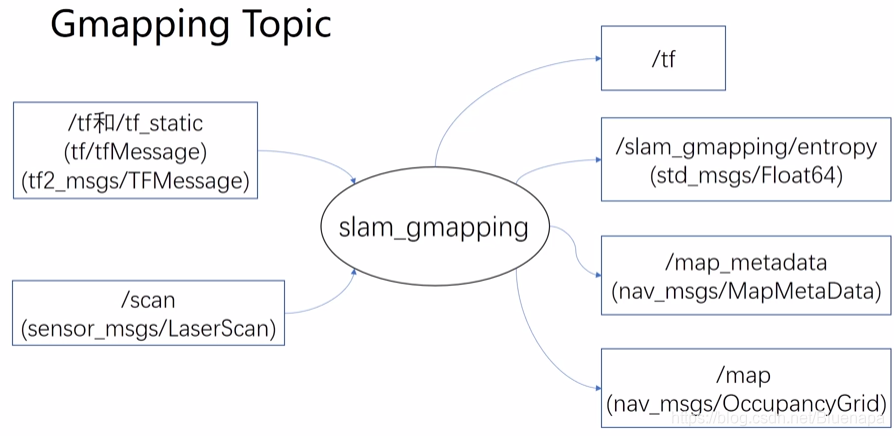
SLAM 开源算法工具包:Gmapping karto Hertor Cartographer
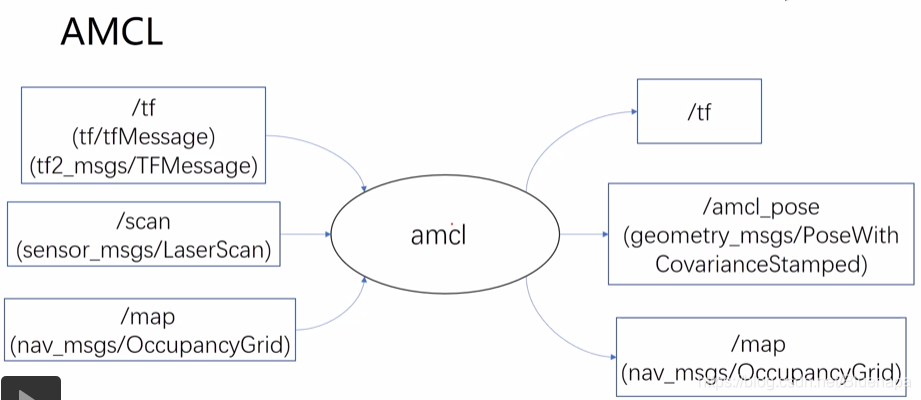
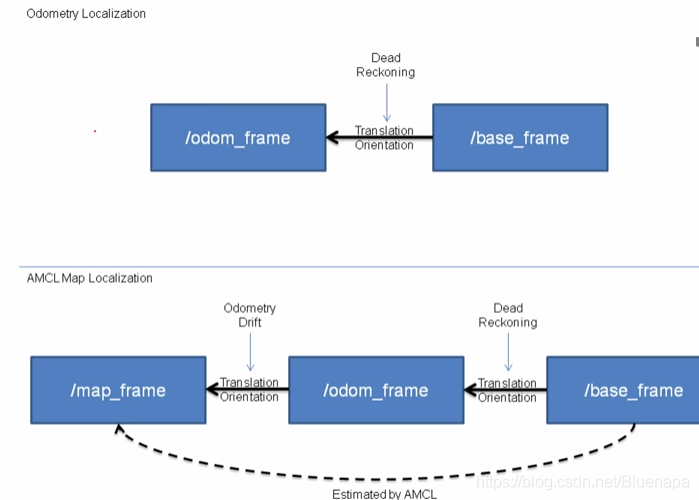
Localization 开源算法工具包: AMCL
Path PLanning 开源算法工具包: Navigation
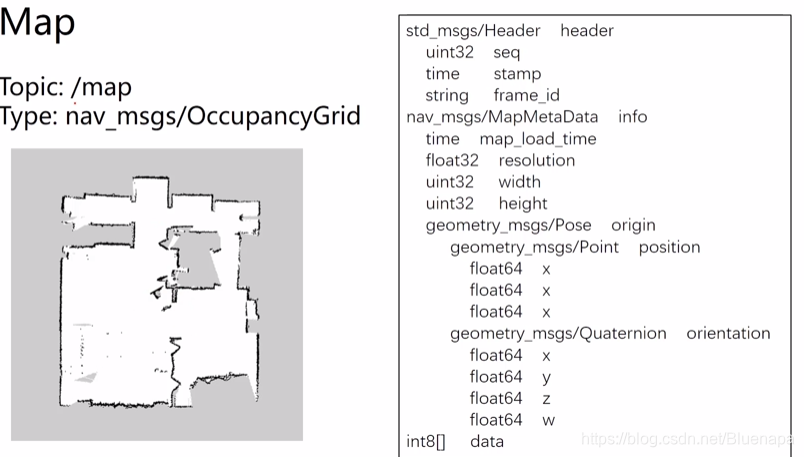
Map的msg 定义在nav_msgs包里面:nav_msgs/OccupancyGrid.msg
OccupancyGrid 栅格地图
二 slam算法包
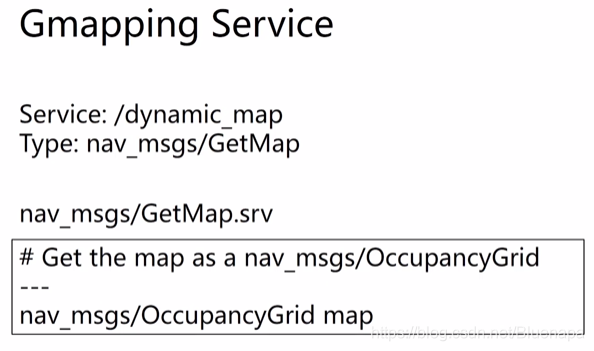
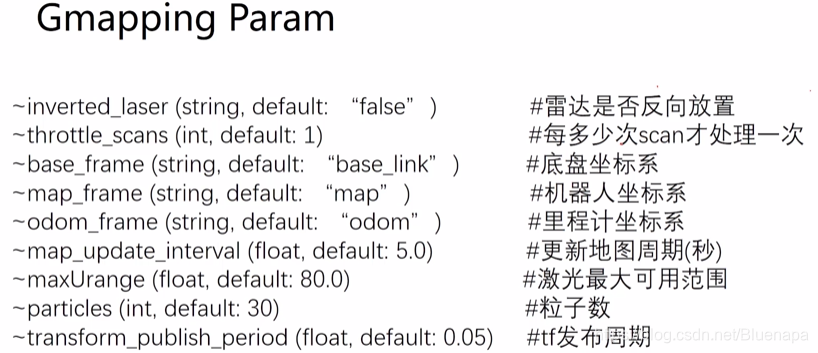
2.1 Gampping 包
三 路径规划算法包
3.1 Navigation 包
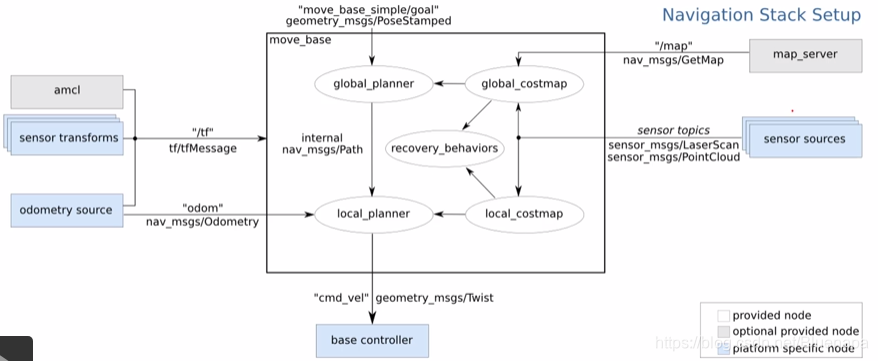
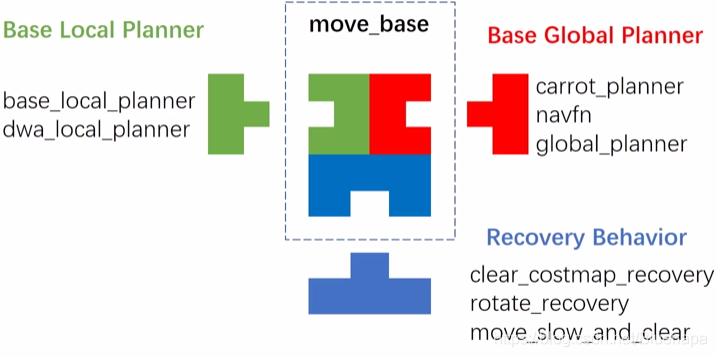
nav_core 接口类下面三个 插件:
3.2 costmap
是一个插件,由三层构成:
static layer:静态 不变
obstacle layer:动态 支持3D点云投影
inflation layer:膨胀
3.3 MapServer
提供地图
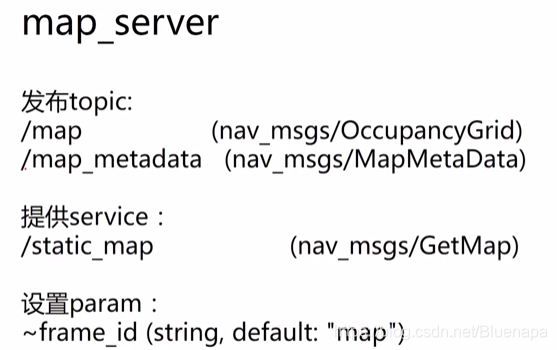
3.3 MapServer
地图的代码操作,一般已经写在launch文件中。
启动server 发布map
$rosrun map_server map_server my_map.yaml
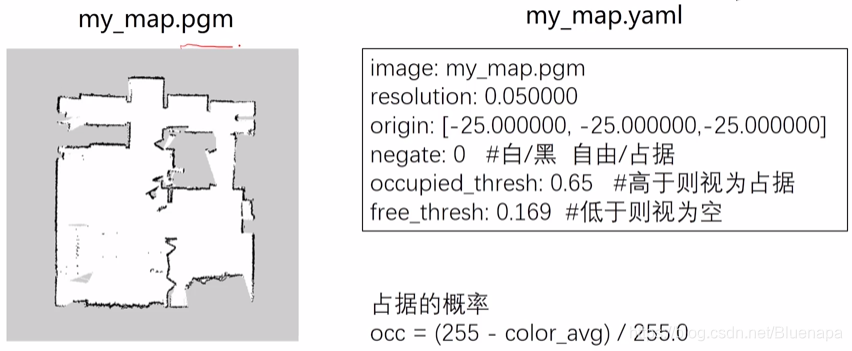
保存地图
$rosrun map_server map_saver [-f my_map]3.4 AMCL