点乘:
点乘的结果是一个实数 a·b=|a|·|b|·cosx x为a,b的夹角
结果为数,且为标量
例:
A=[a1,a2,a3],B=[b1,b2,b3]
A·B=a1b1+a2b2+a3b3
叉乘(向量积):
当向量a和b不平行的时候其模的大小为 |a×b|=|a|·|b|·sinx (实际上是ab所构成的平行四边形的面积) 方向为 a×b和a,b都垂直 且a,b,a×b成右手系当a和b平行的时候,结果为0向量
叉乘结果为矢量,且方向与为A、B矢量均垂直的方向。
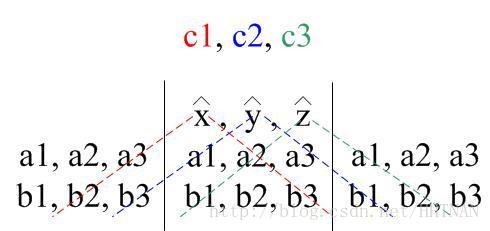
A×B=[a2b3-a3b2,a3b1-a1b3,a1b2-a2b1]
这个式子很不好记忆,看到一种很N×的方法,很好很强大。
参考文献
参考文献2:
dot函数
dot函数是np中的矩阵乘法,x.dot(y) 等价于 np.dot(x,y)
x是m*n 矩阵 ,y是n*m矩阵则x.dot(y) 得到m*m矩阵
矩阵乘法的应用实例如下:
数据统计
某公司有四个工厂,分布在不同地区,同时三种产品,产量(单位;t),试用矩阵统计这些数据。
数据统计
某公司有四个工厂,分布在不同地区,同时三种产品,产量(单位;t),试用矩阵统计这些数据。
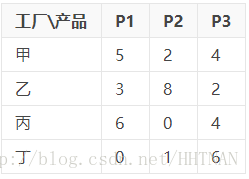
可用下述矩阵描述 A=[[5,2,4],[3,8,2],[6,0,4],[0,1,6]] ,其中四行分别表示甲乙丙丁四个工厂的生产情况,三列分布表示三种产品P1,P2,P3的产量。
再设矩阵 B=[[2,4],[1,3],[3,2]] ,其中第一列表示三种产品的单件利润,第二列表示三种产品的单件体积。
C=[[24,34],[20,40],[24,32],[19,15]]
C=A*B
矩阵C的第一列数据分别表示四个工厂的利润,第二列分别表示四个工厂产品需要的存储空间。